С5
N 4:
о со
Изобретение относится к электротехнике и может быть использовано в системах автоматического регулирования положения различных исполнительных механизмов, применяемых, например, в производстве интегральных микросхем, воло1сонно-оптических изделие, в установках по выращиванию . кристаллов, вытягиванию изделий из расплавов и т.д.
Известен электропривод позиционирования, содержащий последовательно соединенные эадатчик положения, сумматор, регулятор и двигатель, приводящий в движение по линейным Направляющим платформу с установленным на ней исполнительным органом,;полржение которого в пространстве контролируется 5 лазерным интерферометром. Для устранения влияния тре-/ ния на точность позиционирования используется воздушный подшипник, создаваемый за счет подачи сжатого воздуха между .полозьями и направляющими 13 .
Однако быстродействие данного привода, а следовательно, и его динаглическая точность невелики, так как масса подвижной платформы, динаютческое сопротивление которой приходится преодолевать двигателю, велика. Применение воздушного подшипника выдвигает повышенные требования к качеству изготовления направляющих и подвижной части, необходима также система воздухоснабжения и регулирования давления в воздушной подушке,
Наиболее близким к предлагаемому является позиционный электропривод, содержащий электродвигатель, сочлененный с подвижной платформой,якорная обмотка которого соединена с npeобразователем, последовательно занные задатчик положения, сумматор интегратор, усилитель и пьезоэлеменТ сочлененный свободным концом с исполнительным органом, а другим концом закрепленный на подвижной плат-форме, интерферометрический датчик положения исполнительного органа соединен своим выходом с вторым входом сумматора С2 .
Недостатком известного электропривода является наличие двух дат,чиков положения, каждый из которых должен иметь одинаковую и высокую точность, по крайней мере вдвое превышающую точность позиционировав ния в системе. Пьезоэлемент, жестко закрепленный одним концом на массивной платформе, обладает резко выраженными колебательными свойствами со слабым внутренним демпфированием колебаний. Его передаточная функция
у/ -I .
14Т,
В этом выражении Т мало Цт г т . С учетом обратной связи по положению исполнительного органа передаточная функция замкнутого контура регулиW -рования положения +7 р+т т р . . и -t и j2 и
0 . Б ЭТОМ выраженииTj - постоянная времени интегратора. Система описываемая передаточной функцией Wj, устойчива -только при выполнении условия Т Tj/T. Поскольку Ту ма ло, последнее условие выполняется только при больших значениях Т. Для исключения автоколебаний пьезоэлемента в указанной системе необходимо применять интегратор с боль0 той постоянной времени, что приводит к неоправданному затягиванию переходных процессов во времени. Таким образом, динамические возможности пьезоэлемента в указанной
5 системе недоиспользуются. Кроме того, перемещение платформы может.начинаться тогда, когда такОё перемещение можно избежать, т.е. тогда, когда Пьезоэлемент способен один
0 скомпенсировать ошибку,что также
приводит к снижению точности позиционирования в среднем.
Наконец переменное усилие нагруЭки, приложенное к исполнительному
5 органу,способно вызвать в описанной системе такие деформации пьезоэлемента, которые не могут быть скомпенсированы в контуре точного позиционирования вследствие, например, естест
0 венного насыщения усилителя. Возникающая при этом погрешность, как бы не- лика она не была, не будет отработана двигателем перемещения платформы. Цель изобретения - повышение
динамической точности позиционирования.
Поставленная цель достигается тем, что в позиционный электропривод, содержащий электродвигатель, сочлененный с подвижной платформой,
якорная обмотка которого соединена с преобразователем, последователь-но связанные задатчик положения, сумматор, интегратор, усилитель и Пьезоэлемент, сочлененный свободным
концом с исполнительным органом, а другим концом закрепленный на подвижной платформе, интерферометрический датчик положения исполнительного органа, соединенный своим выходом с вторым входом сумматора, дополнительно введены дифференцирующее звено и нелинейное звено типа Зона нечувствительности, причем выход усилителя через нелинейное
звено соединен с входом преобразова
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный электропривод | 1983 |
|
SU1164848A2 |
| Позиционный электропривод | 1984 |
|
SU1220096A2 |
| Позиционный электропривод | 1985 |
|
SU1267576A2 |
| Следящий электропривод | 1990 |
|
SU1764031A1 |
| Позиционный электропривод | 1986 |
|
SU1403317A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Двухканальный электропривод | 1987 |
|
SU1473060A1 |
| Самонастраивающийся электропривод | 1985 |
|
SU1247831A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Двухканальный электропривод | 1989 |
|
SU1665488A1 |
ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД, содержащий электродвигатель, сочлененный с подвижной платформой,, якор ная обмотка которого соединена с преобразователем, последовательно связанные задатчик положения, сумма тор, интегратор, усилитель и пьезоэлемент, сочлененный свободным концом с исполнительным органом, а другим концом закрепленный на подвижной платформе, интерферометричес кий датчик положения исполнительного органа, соединенный своим выходом с вторым входом сумматора, отличающийся тем, что, с целью повышения динамической точности позиционирования, в него дополнительно введены дифференцирующее и нелинейное звено типа Зона нечувствительности, причем выход i усилителя через нелинейное звено соединен с входом преобразователя, (Л а выход интерферометрического датчика положения исполнительного органа через дифференцирующее звено соединен с входом усилителя.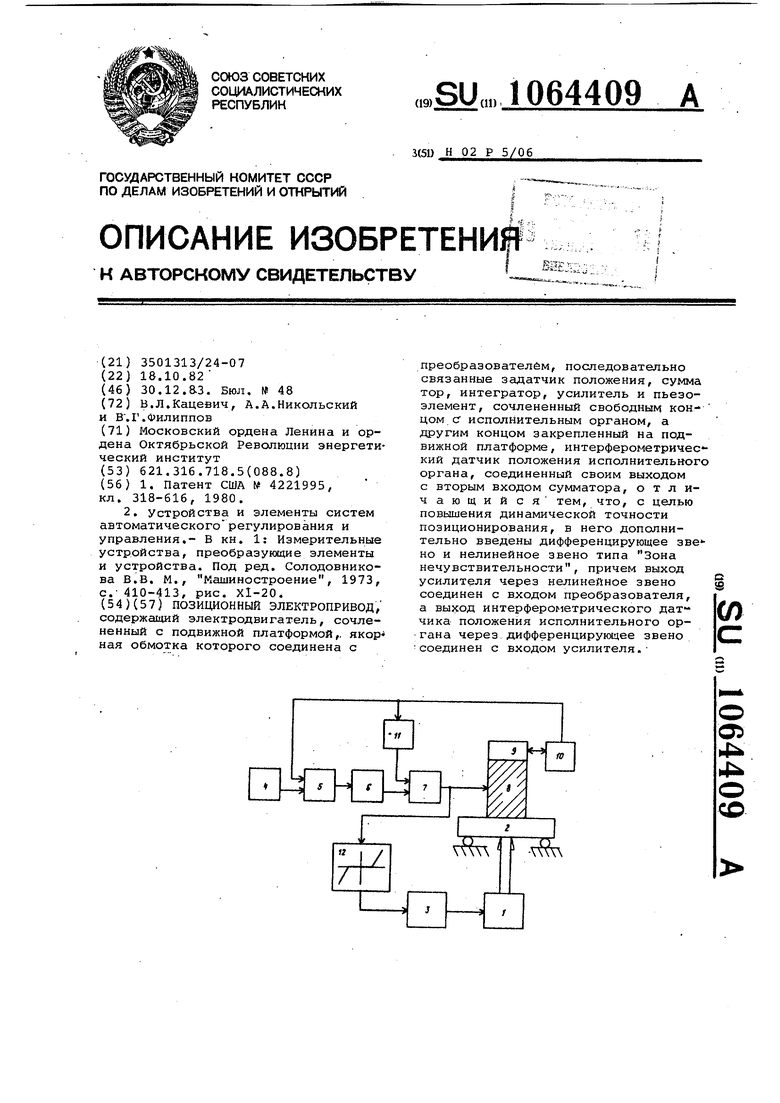
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США W 4221995, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройства и элементы систем автоматическогорегулирования и управления,- В кн | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Под ред | |||
| Солодовникова В.В | |||
| М., Машиностроение, 1973, с.- 410-413, рис | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
