О5
СП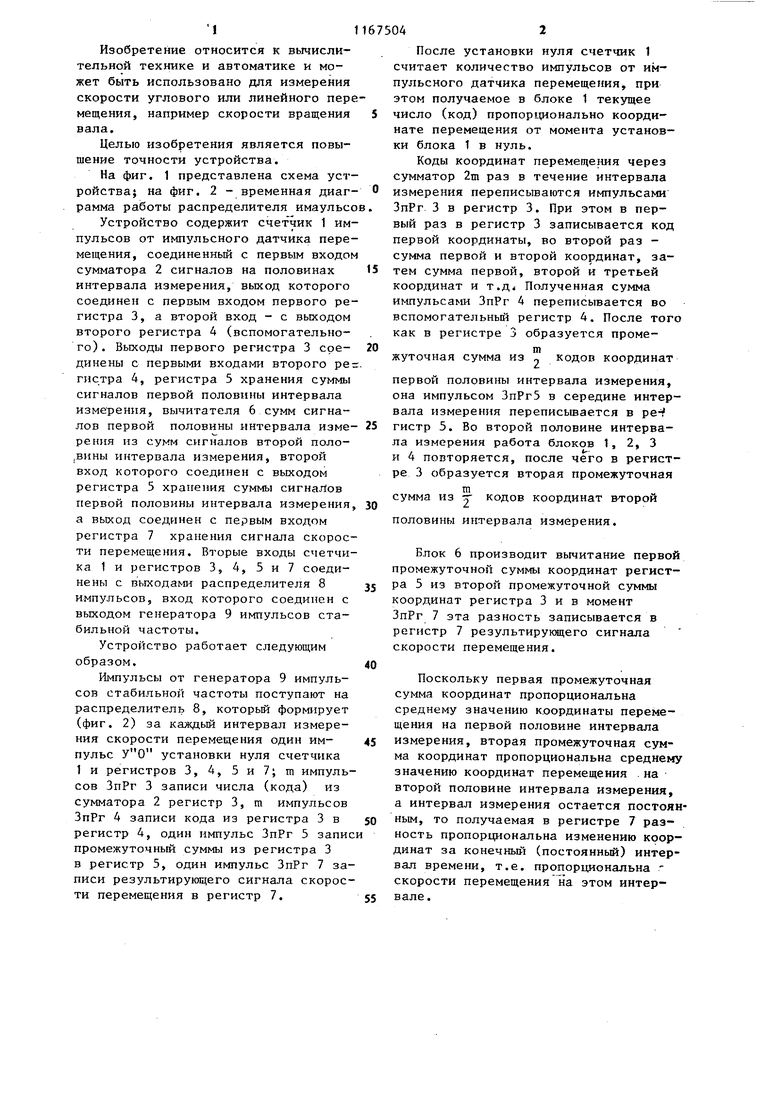
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения скорости перемещения | 1985 |
|
SU1275291A2 |
| Способ определения скорости перемещения | 1983 |
|
SU1138743A1 |
| Устройство для измерения фазовых сдвигов | 1984 |
|
SU1226341A1 |
| Устройство аналого-цифрового преобразования | 1977 |
|
SU641646A1 |
| Измеритель скорости перемещения | 1982 |
|
SU1016744A1 |
| Преобразователь сдвига фазы в код скорости и ускорения | 1986 |
|
SU1358096A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1042047A1 |
| Способ программного регулирования и устройство для его осуществления | 1987 |
|
SU1464147A1 |
| Устройство для считывания графической информации | 1981 |
|
SU983731A1 |
| Устройство для измерения временных интервалов | 1982 |
|
SU1034009A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПЕРЕГЧЕЩЕНИЯ, содержащее импульсный датчик скорости, счетчик, соединенньш с датчиком скорости, распределитель импульсов, соединенный со счетчиком, первым и вторым регистром, вычитатель и сумматор. отличающееся тем, чтд, с целью повышения точности, оно дополнительно снабжено третьим и четвертым регистрами, первые входы которых соединены с распределителем импульсов, выход счетчика соединен (Г первым входом сумматора, второй вход сумматора соединен с выходом второго регистра, выход сумматора соединен с вторым входом первого ре« гистра, выходы которого соединены с вторыми входами второго и третьего регистров и первым входом вычитате- ля, второй вход которого соединен с выходом третьего регистра, а выход соединен с вторым входом четвертого регистра. сл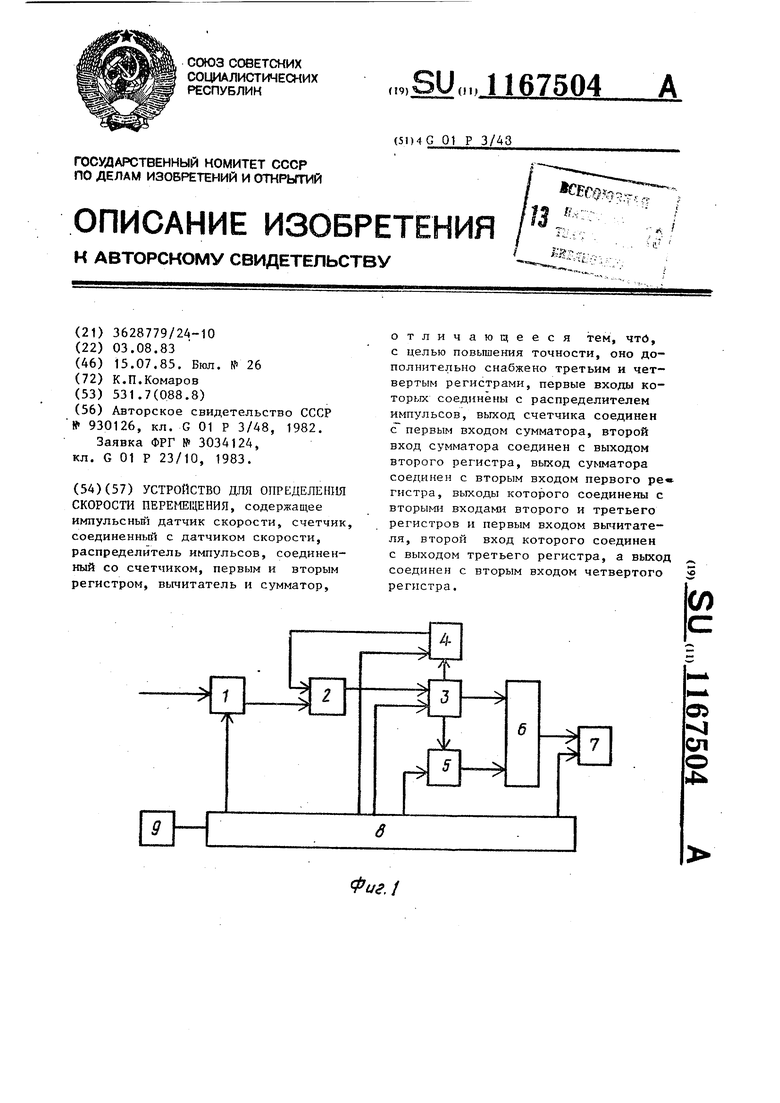
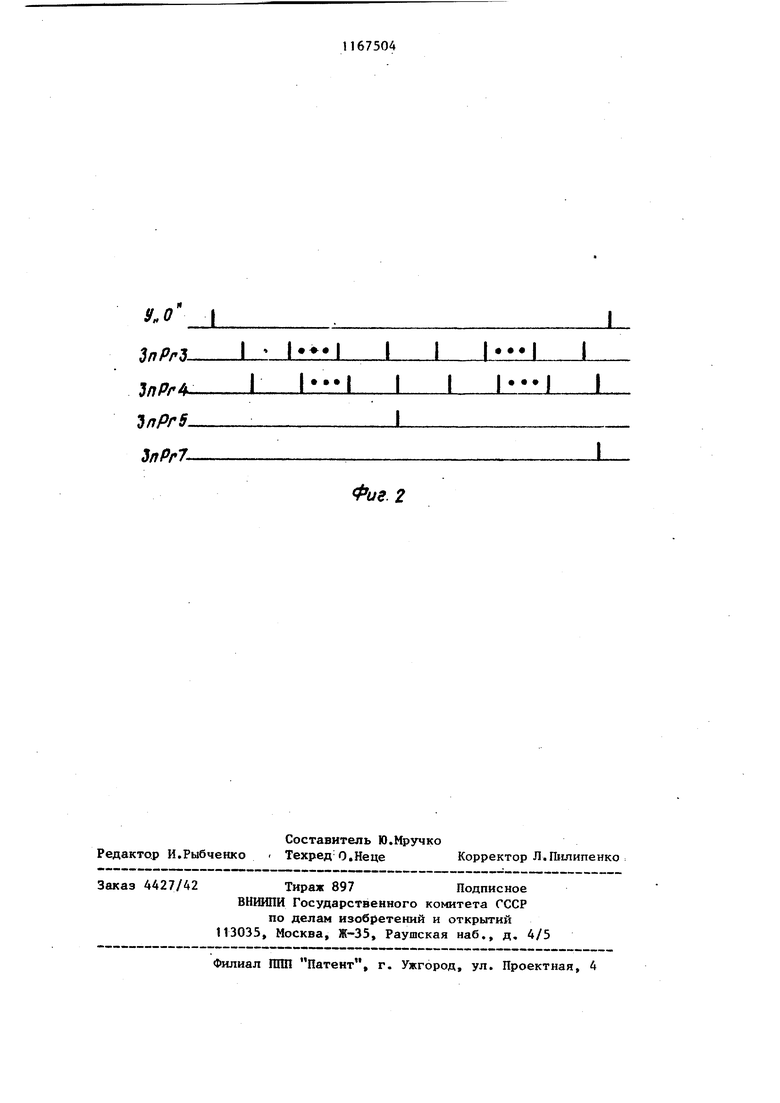
Изобретение относится к вычислительной технике и автоматике и может быть использовано для измерения скорости углового или линейного пере например скорости вращения мещения, вала. Целью изобретения является повышение точности устройства, На фиг. 1 представлена схема устройства; на фиг. 2 - временная диаграмма работы распределителя имаульсо Устройство содержит счетчик 1 импульсов от импульсного датчика перемещения, соединенный с первым входом сумматора 2 сигналов на половинах интервала измерения, выход которого соединен с первым входом первого регистра 3, а второй вход - с выходом второго регистра 4 (вспомогательного) . Выходы первого регистра 3 соединены с первыми входами второго ре гистра 4, регистра 5 хранения суммы сигналов первой половины интервала измерения, вычитателя 6 сумм сигналов первой половины интервала измерения из сумм сигналов второй поло,вины интервала измерения, второй вход которого соединен с выходом регистра 5 хранения суммы сигналов первой половины интервала измерения а выход соединен с первым входом регистра 7 хранения сигнала скорости перемещения. Вторые входы счетчи ка 1 и регистров 3, 4, 5 и 7 соединены с выходами распределителя 8 импульсов, вход которого соединен с выходом генератора 9 импульсов стабильной частоты. Устройство работает следующим образом. Импульсы от генератора 9 импульсов стабильной частоты поступают на распределитель 8, который формирует (фиг. 2) за каждый интервал измерения скорости перемещения один им- пульс установки нуля счетчика 1 и регистров 3, 4, 5и7;т импуль сов ЗпРг 3 записи числа (кода) из сумматора 2 регистр 3, m импульсов ЗпРг 4 записи кода из регистра 3 в регистр 4, один импульс ЗпРг 5 запи промежуточньй суммы из регистра 3 в регистр 5, один импульс ЗпРг 7 записи результирующего сигнала скорости перемещения в регистр 7. 042 После установки нуля счетчик 1 считает количество импульсов от импульсного датчика перемещения, при этом получаемое в блоке 1 текзпцее число (код) пропорционально координате перемещения от момента установки блока 1 в нуль. Коды координат перемещения через сумматор 2т раз в течение интервала измерения переписываются импульсами ЗпРг 3 в регистр 3. При этом в первый раз в регистр 3 записывается код первой координаты, во второй раз сумма первой и второй координат, затем сумма первой, второй и третьей координат и т.д Полученная сумма импульсами ЗпРг 4 переписывается во вспомогательный регистр 4. После того как в регистре 3 образуется промежуточная сумма из „ кодов координат первой половины интервала измерения, она импульсом ЗпРгЗ в середине интервала измерения переписывается в регистр 5. Во второй половине интервала измерения работа блоков 1,2,3 и 4 повторяется, после чего в регистре 3 образуется вторая промежуточная m сумма из кодов координат второй половины интервала измерения. Блок 6 производит вычитание первой промежуточной суммы координат регистра 5 из второй промежуточной суммы координат регистра 3 и в момент ЗпРг 7 эта разность записывается в регистр 7 результирукщего сигнала скорости перемещения. Поскольку первая промежуточная сумма координат пропорциональна среднему значению координаты перемещения на первой половине интервала измерения, вторая промежуточная сумма координат пропорциональна среднему значению координат перемещения . на второй половине интервала измерения, а интервал измерения остается постоянным, то получаемая в регистре 7 разность пропорциональна изменению координат за конечный (постоянный) интервал времени, т.е. пропорциональна скорости перемещения на этом интервале.
У. О
f,Pr I - I I I
1 h4 I I I
J/7/V4.
nPrS.
SnPr7
Фие. 2
| Цифровой тахометр | 1980 |
|
SU930126A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Заявка ФРГ № 3034124, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
