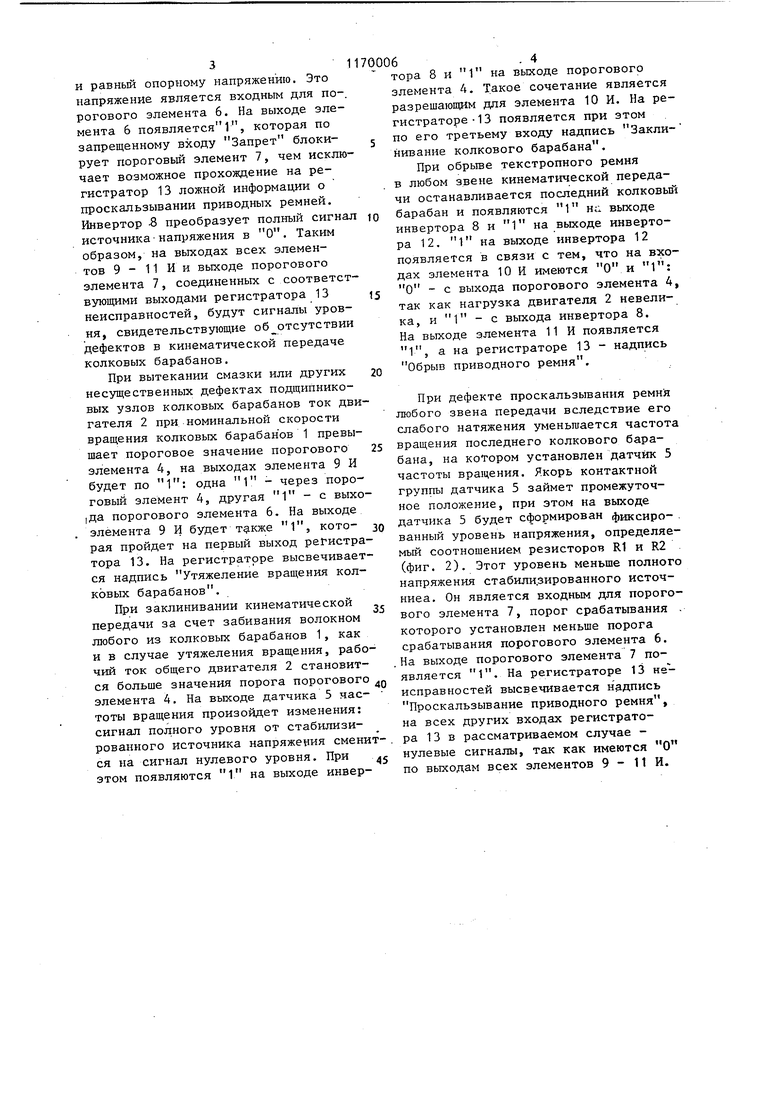
1 Изобретение относится к текстиль ной промышленности, в частности к устройствам автоматизированного определения дефектов кипоразборщиков в прядильном производстве, Целью изобретения является расш рение функциональньк возможностей путем обеспечения дифференциальной оценки возникшей в кинематической передаче неисправности. На фиг. 1 представлена блок-схема устройства; на фиг. 2 - схема подачи напряжения стабилизированног источника через контакты датчика ча тоты вращения. Устройство -состоит из группы идентичных измерительных каналов по числу приводных сторонок колковы барабанов кипоразборщика, в данном случае двух каналов. Каждьш канал включает колковые барабаны 1, приводимые во вращение от общего электродвигателя 2, в цепь питания которого включен датчик 3 тока. Сиг нал с датчика 3 тока поступает на вход порогового элемента 4, порог срабатывания которого может регулироваться. На последнем-приводном колковом барабане лсестко закреплен датчик 5 частоты вращения с контакт ной группой, на нормально разомкнутьй контакт которой подается опорное напряжение от стабилизированног источника (фиг. 2). Фиксированньй уровень напряжения, снимаемьй с кон тактной группыдатчика 5, через ее подвижный якорь поступает на информационные входы пороговых элементов 6 и 7, при этом выход элемента 6 соединен с запрещающим входом элемента 7. Инвертор 8 преобразует (инвертирует) только нулевой уровен сигнала с датчика 5 частоты вращения. Сигналы с выходов пороговых элементов 4 и 6 поступают соответст венно на входы элемента 9 И. На входы элемента 10 И поступают сигна лы соответственно с порогового элемента 4 и инвертора 8. На входы элемента 11 И поступают сигналы соответственно с инверторов 8 и 12, при этом вход инвертора 12 соединен с выходом элемента 10 И. С выходов всех элементов 9 - 11 И и с выхода порогового элемента 7 сигналы посту пают соответственно на первый, третий, четвертый и второй входы регис ратора 13 неисправностей. 62 Устройство для определения неисправностей кинематической передачи колковых барабанов кипоразборщика работает следующим образом. Условно исходным состоянием логических элементов устройства является состояние логического О, рабочим состоянием является логическая 1, а операция инвертирования, выполняе ая инверторами, является операцией перехода, из одного состояния в другое, например переход из О в 1. Привключении кипоразборщика посредством заводской станции управления в цепи статора общего электродвигателя 2 колковых барабанов 1 протекает рабочий ток, определяемый моментом нагрузки. Этот ток фиксируется датчиком 3 тока и в виде аналогового сигнала определенного уровня поступает на вход порогового элемента 4. Порог срабатывания порогового элемента 4 подбирается индивидуально для каждого двигателя, колковых барабанов кипоразборщика с учетом существующего разброса параметров двигателей. Порог выби- . рается с завышением по отношеншо к нормальному .рабочему току двигателя на (30+40)%. Вращение двигателя 2 через последний из колковых барабанов 1 кинематически связанных один с другим и с общим двигателем, передается датчику 5 частоты вращения. При отсутствии дефектов в кинематической передаче колковых барабанов 1 сигнал с датчика тока 3 не превышает порогового уровня порогового элемента 4, и на выходе элемента 4 имеет О, который запрещает прохождение сигналов через элементы 9 и 10 И. Вращение двигателя 2 через все исправные элементы кинематической передачи передается в виде номинальной скорости последнему из колковых барабанов 1 и связанному с ним датчику 5 частоты вращения. Под действием центробежной сипы, возникающей при номинальной скорости вращения ротора датчика 5 частоты вращения, нормально разомкнутые контакты его контактной группы замыкаются. Датчик 5 вьщает при этом на выходе наибольший уровень напряжения, соответствующий номинальной скорости колковых барабанов и равньш опорному напряжению. Это напряжение является входным для по-, рогового элемента 6. На выходе элемента 6 появляется, которая по запрещенному входу Запрет блокирует пороговьй элемент 7, чем исключает возможное прохождение на регистратор 13 ложной информации о проскальзывании приводных ремней. Инвертор -8 преобразует полный сигнал источника-напряжения в О. Таким образом, на выходах всех элементов 9 - 11 И и выходе порогового элемента 7, соединенных с соответствующими выходами регистратора 13 неисправностей, будут сигналы уровня, свидетельствующие об отсутствии дефектов в кинематической передаче колковых барабанов. При вытекании смазки или других несущественных дефектах подщипниковых узлов колковых барабанов ток дви гателя 2 при номинальной скорости вращения колковых барабанов 1 превышает пороговое значение порогового элемента 4, на выходах элемента 9 И будет по одна 1 - через пороговый элемент 4, другая 1 - с выхо |Да порогового элемента 6, На выходе элемента 9 И будет 1, которая пройдет на первый выход регистра тора 13. На регистраторе высвечивает ся надпись Утяжеление вращения колковых барабанов. При заклинивании кинематической передачи за счет забивания волокном любого из колковых барабанов 1, как и в случае утяжеления вращения, рабо чий ток общего двигателя 2 становится больше значения порога порогового Q элемента 4. На выходе датчика 5 час- тоты вращения произойдет изменения: сигнал полного уровня от стабилизированного источника напряжения сменится на сигнал нулевого уровня. При ,j этом появляются 1 на выходе инвер106. 4 тора 8 и 1 на выходе порогового элемента 4. Такое сочетание является разрешающим для элемента 10 И. На регистраторе -13 появляется при этом по его третьему входу надпись Заклинивание колкового барабана, При обрьше текстропного ремня в любом звене кинематической передачи останавливается последний колковьй барабан и появляются 1 н;: выходе инвертора 8 и 1 на выходе инвертора 12. 1 на выходе инвертора 12 появляется в связи с тем, что на входах элемента 10 И имеются О и О - с выхода порогового элемента 4, так как нагрузка двигателя 2 невелика, и 1 - с выхода инвертора 8. На выходе элемента 11 И появляется 1, а на регистраторе 13 - надпись Обрыв приводного ремня. При дефекте проскальзывания ремня любого звена передачи вследствие его слабого натяжения уменьшается частота вращения последнего колкового барабана, на котором установлен датчик 5 частоты вращения. Якорь контактной группы датчика 5 займет промежуточное положение, при этом на выходе датчика 5 будет сформирован фиксиро- . ванный уровень напряжения, определяемый соотношением резисторов R1 и R2 (фиг. 2). Этот уровень меньше полного напряжения стабили.зированного источниеа. Он является входным для порогового элемента 7, порог срабатывания . которого установлен меньше порога срабатывания порогового элемента 6. На выходе порогового элемента 7 появляется 1. На регистраторе 13 неисправностей высвечивается надпись Проскальзывание приводного ремня, на всех других входах регистратора 1 3 в рассматриваемом случае нулевые сигналы, так как имеются О по выходам всех элементов 9 - 11 И.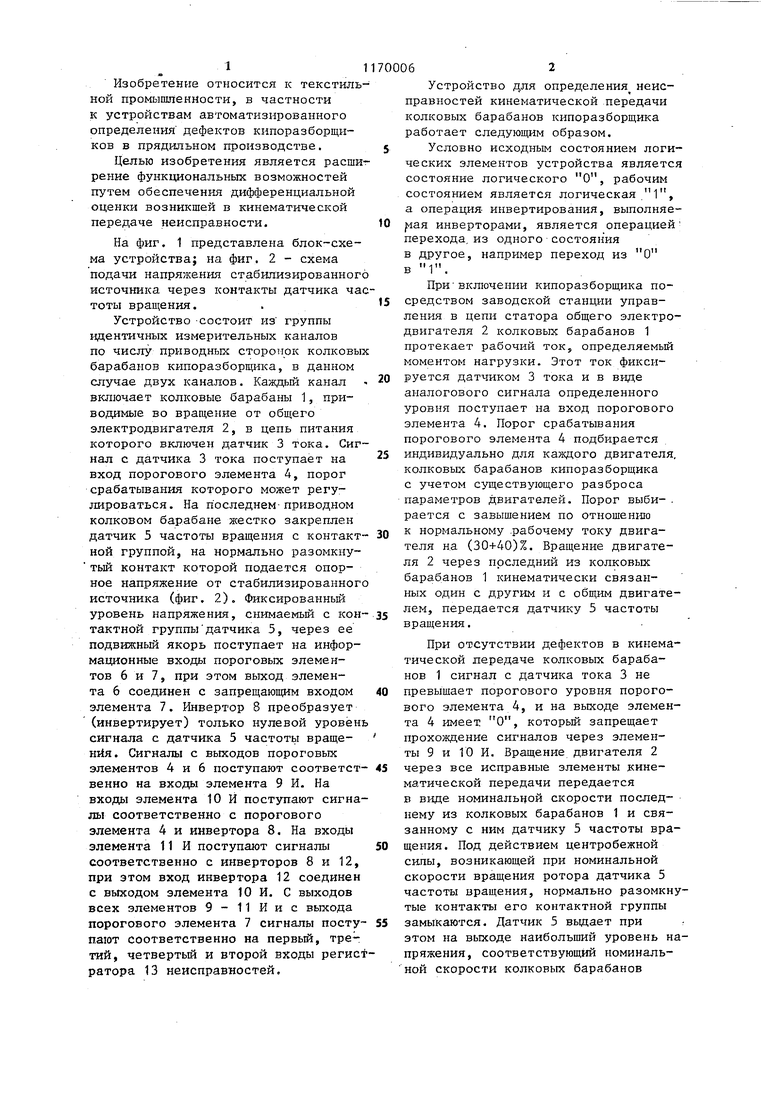
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля зависания грузовой плиты над ставкой кипоразборщика | 1984 |
|
SU1180412A1 |
| Устройство для регулирования производительности кипоразборщика | 1983 |
|
SU1112068A1 |
| Устройство для отбора от кип волокнистого материала | 1982 |
|
SU1063879A2 |
| Устройство для отбора от кип волокнистого материала | 1985 |
|
SU1258924A2 |
| Регулятор производительности кипоразборщика | 1980 |
|
SU931838A1 |
| Устройство питания волокном параллельно работающих текстильных машин | 1985 |
|
SU1266903A1 |
| Способ регулирования производительности батареи кипоразборщиков и устройство для его осуществления | 1982 |
|
SU1060714A1 |
| Способ диагностирования механизмов циклического действия | 1988 |
|
SU1649302A1 |
| Автоматическое устройство управления нагрузкой двигателя транспортного средства | 1982 |
|
SU1096139A1 |
| Устройство для управления пневмомеханической прядильной машиной | 1985 |
|
SU1294885A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТЕЙ КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧИ КОЛКОВЫХ БАРАБАНОВ КИПОРАЗБОРЩИКА, содержащее датчик тока, включенный в цепь питания общего электродвигателя КОЛКОВЫХ барабанов, датчик частоты вращения и регистратор неисправностей, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения дифференциальной оценки возникшей в кинематической передаче неисправности, оно имеет пороговые элементы, элементы И и инверторы, а датчик частоты вращения кинематически связан с валом последнего колкового барабана отно-. сительно общего электродвигателя КОЛКОВЫХ барабанов, при этом выходы датчиков тока и частоты вращения подключены к информационным входам соответствующих пороговых элементов .выходы первого и второго пороговых элементов через первый элемент И подключены к первому входу регистратора неисправностей, второй вход которого соединен с выходом третьего i порогового элемента, запрещающим входом связанного с вьтходом второго (Л порогового элемента, выход дачтика с частоты вращения через инвертор свя зан с первыми входами второго и третьего элементов И, -выходы которых подключены соответственно к третье- му и четвертому входам регистратора неисправностей, а вторые входы второго и третьего элементов И подключень к выходам соответственно первого порогового элемента и второго инверто. ра, входом связанного с выходом элемента И. О5 
| Павельев К.И | |||
| и др | |||
| Диагностирование технического состояния кипоразборочных машин в АСУ ТП хлопкопрядения | |||
| - Текстильная промышленность, № 9, 1983, с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
