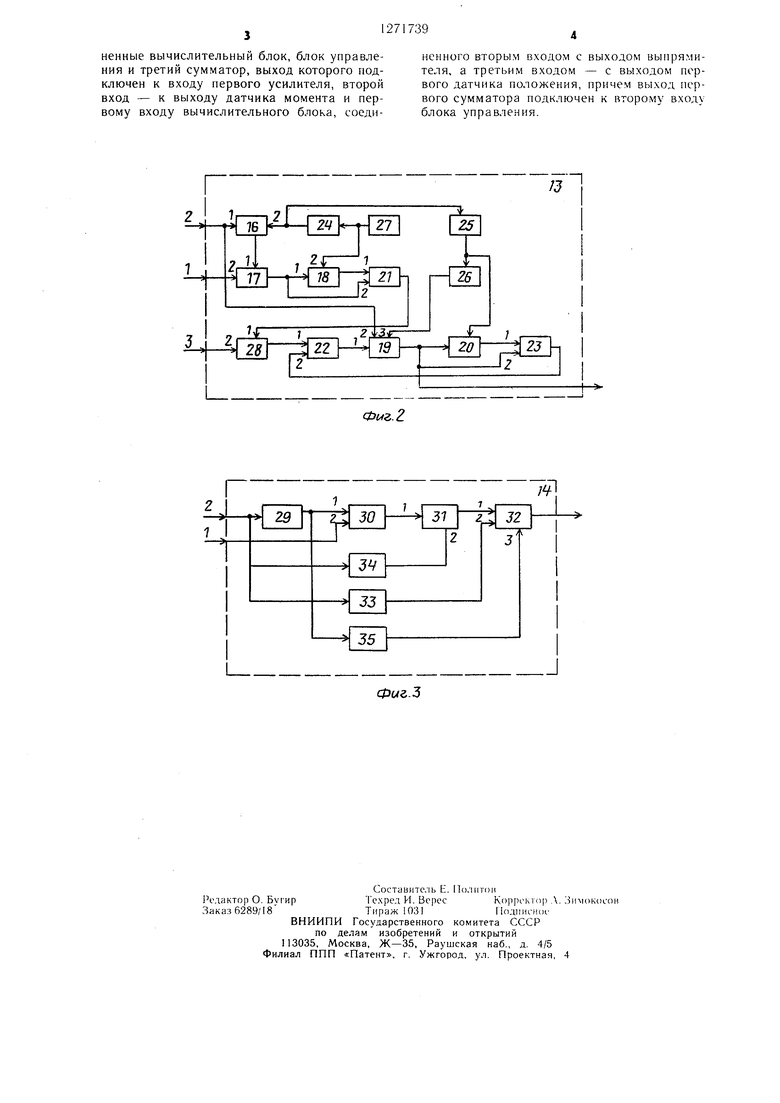
Изобретение относится к робототехнике и может быть использовано при создании промышленных роботов. Цель изобретения - гювьпиение быстродействия устройства за счет реализации квазиоИтимальных по быстродействию алгоритмов управления, инвариантных к изменению момента инерции нагрузки. На фиг.1 представлена функциональная схема устройства; на фиг.2 - схема вычислительного блока; на фиг.З - схема блока управления. Устройство содержит блок 1 задания программы, первый сумматор 2, дифференциатор 3, выпрямитель 4, первый усилитель 5, первый привод 6, датчик 7 момента, первый датчик 8 положения, второй сумматор 9, второй усилитель 10, второй привод 11, второй датчик 12 положения. Вычислительный блок 13, блок 14 управления, третий сумматор 15, элемент ИЛИ 16, первый 17, второй 18, третий 19, четвертый 20, блоки выборки-запоминания, первый 21, второй 22, третий 23 сумматоры, первый 24, второй 25, третий 26 элементы задержки, генератор 27 тактовых импульсов, умножитель 28, выпрямитель 29, компаратор 30, первый 31, второй 32 коммутаторы, усилитель 33, первый 34, второй 35 пороговые элементы. Устройство работает следующим образом. В соответствии с программой технологического цикла, хранящейся в блоке 1 задания программы, на его выходах появляются сигналы, соответствующие требуемым перемещениям приводов 6 и И. По перепаду сигпала на первом выходе блока 1 задания программы на выходе выпрямителя 4 появляется короткий импульс, которьгй обнуляет сигнал на выходе вычислительного блока 13. Сигнал с первого выхода блока 1 задания программы сравнивается в первом сумматоре 2 с сигналом от первого датчика 8 положения, и сформированная он ибка UONI поступает в блок 14 управления. На выходе блока 14 управления появляется постоянный сигнал Uio соответствующей полярности. Этот сигнал сравнивается с сигналом с выхода датчика 7 момента, и ощибка по моменту через первый усилитель 5 и привод 6 (привод вращения) начинает разгон исполнительного органа промышленного робота с постоянным моментом. При равноускоренном движении величина пути торможения фг У()1т4-а(/2 с учетом Vo--atr определяется как функция кинетический энер1-ии J 11 п К. 2 М КЛю где М 1а UIO/KJ« - момент, развиваемый приводом 6; а - ускорение; Ьц) - сигнал, пропорциональный требуемому значению момента привода 6; Кд - коэффициент 1 9 передачи датчика 7 момента; I - момент инерции вращающихся частей; vo - скорость вращения; Un - выходной сигнал вычислительного блока 13; Кп - коэффициент его передачи. В соответствии с этим сигнал на выходе блока 14 управления определяется из выражения -lJiosign(|Uo.i: -U«Ko)x X SignlJom при (Uour| Uo KUomпри I U«mKUo, где Ко - КяяКй Кл-111(1 1, Кй« - коэффициент передачи датчика 8 положения. Вычислительный блок 13 осуществляет интегрирование сигнала, пропорционального моменту привода 6, по сигналу, пропорциональному положению привода 6 по формуле прямоугольников & и„ к2М1Лф,«к5маф, где К - коэффициент пропорциональности; (|, - угол поворота привода 6, М - момент, развиваемый приводом 6; ф| и фа - соответственно начальное и конечное положения привода 6. Таким образом, разгон продолжается до тех пор, пока сигнал на выходе вычислительного блока 13 не сравнивается по величипе с сигналом ошибки I УОШ. После чего на выходе блока 14 управления появляется сигнал противоположной полярности и начинается торможение привода 6. При выполнении условия | Uom I ; Uo на выходе блока 14 управления появляется сигнал, пропорциональный ошибке Ки°ш, и исполнительный орган стабилизируется в требуемом положении. Здесь Uo постоянная уставка, определяющая условие перехода на линейный режим. Формула изобретения Устройство для управления промышленным роботом, содержащее последовательно соединенные блок задания программ, дифференциатор и выпрямитель, последовательно подключенные первый усилитель и первый привод, механически связанный с датчиком момента и первым датчиком положения, выход которого соединен с первым входом первого сумматора, подключенного вторым входом к первому выходу блока задания программы, второй выход которого через последовательно соединенные второй сумматор и второй усилитель подключен к входу второго привода, механически связанного с вторым датчиком положения, соединенного выходом с вторым входом второго сумматора, отличающееся тем, что с целью повышения быстродействия устройства, в него дополнительно введены последовательно соединенные вычислительный блок, блок управления и третий сумматор, выход которого подключен к входу первого усилителя, второй вход - к выходу датчика момента и первому входу вычислительного блока, соединенного вторым входом с выходом выпрямителя, а третьим входом - с выходом первого датчика положения, причем выход первого сумматора подключен к второму входу блока управления.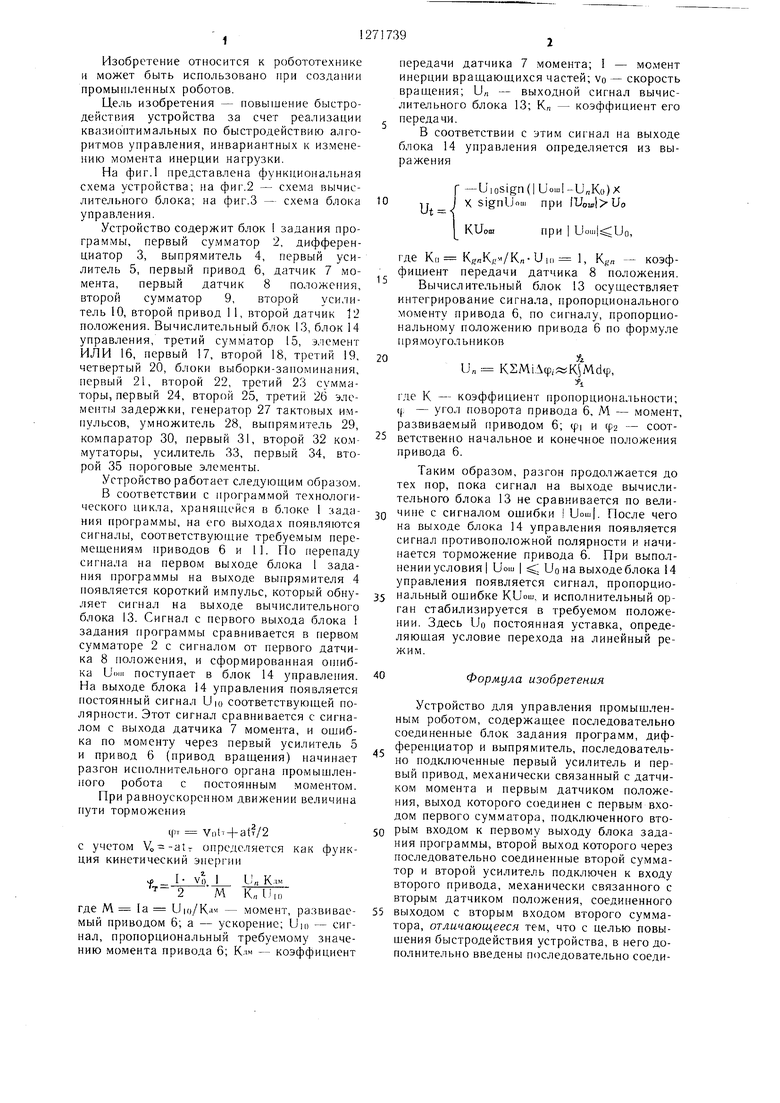
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления промышленным роботом | 1986 |
|
SU1349998A1 |
| Устройство для управления промышленным роботом | 1989 |
|
SU1646851A1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1170428A1 |
| Устройство для управления манипулятором | 1981 |
|
SU991367A1 |
| Устройство для позиционного управленияМАНипуляциОННыМ РОбОТОМ | 1979 |
|
SU838664A1 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Устройство для управления электроприводом промышленного робота | 1985 |
|
SU1265691A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
Изобретение относится к робототехнике и может быть использовано при создании промышленных роботов, обеспечивающих перенос грузов различной массы с различными скоростями. Целью изобретения является повышение быстродействия устройства за счет реализации квазиоптимальных по быстродействию алгоритмов управления, инвариантных изменению момента инерции нагрузки. Устройство содержит блок задания программы, вычислительный блок, блок управления, приводы, связанные с датчиками положения, датчик момента, а также дифференциатор, выпрямитель и сумматоры. 3 ил. (Л ю аяЛ. оо со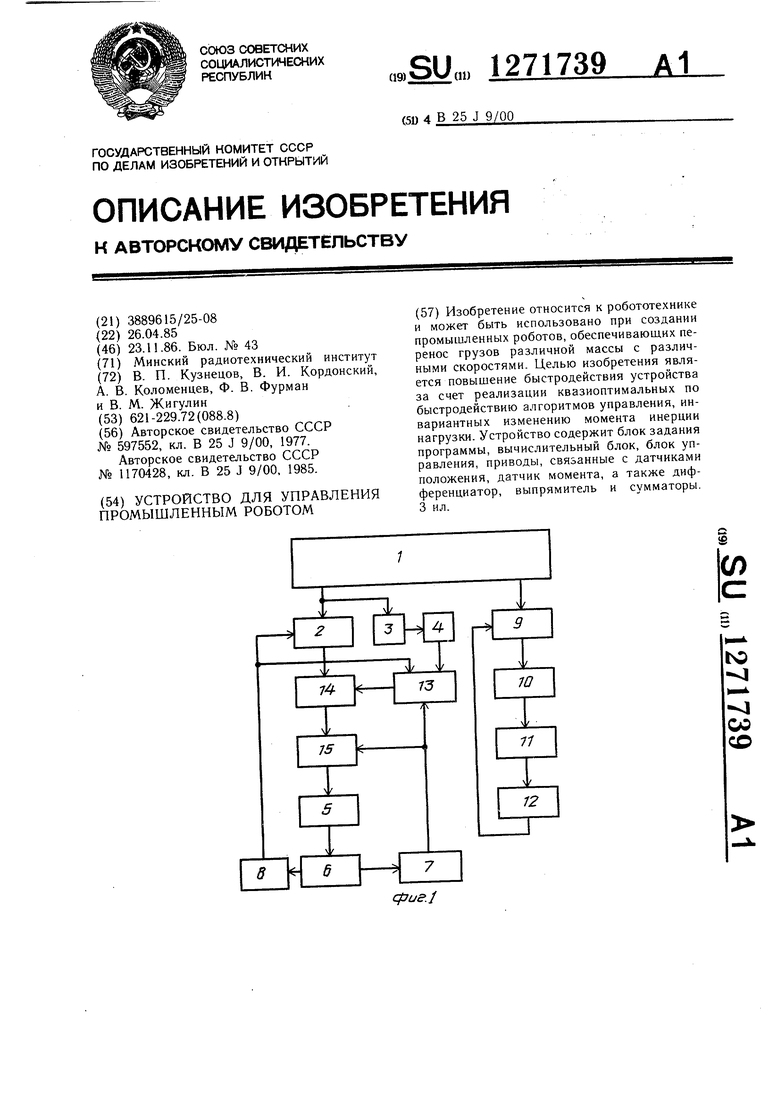
Фиг.2
| Устройство для автоматического управления роботом-манипулятором | 1975 |
|
SU597552A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1170428A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
