Изобретение относится к области робототехники и может быть использовано для автоматического управления приводами промышленного робота.
Цель изобретения - повышение динамической точности за счет введения быстродействующей коррекции.
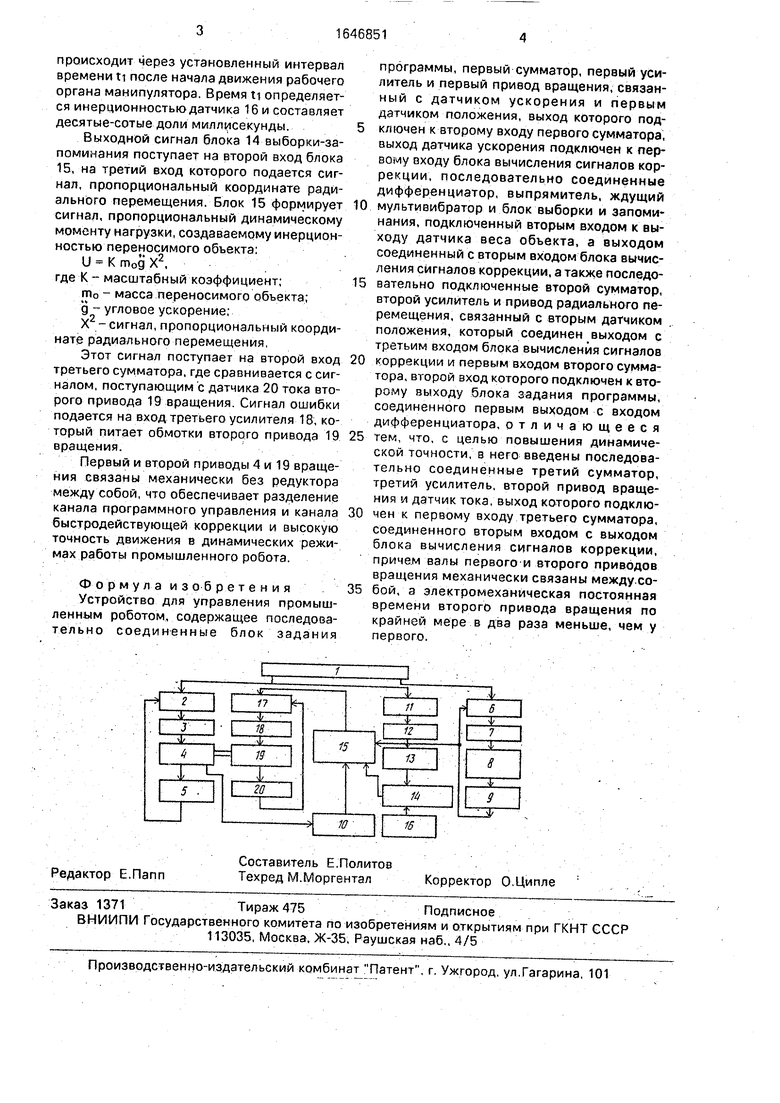
На чертеже представлена функциональная схема устройства.
Устройство содержит блок 1 задания программы, первый сумматор 2, первый усилитель 3, первый привод 4 вращения, первый датчик 5 положения, второй сумматор 6, второй усилитель 7, привод 8 радиального перемещения, второй датчик 9 положения, датчик 10 ускорения, дифференциатор 11, выпрямитель 12, ждущий мультивибратор 13, блок 14 выборки-запоминания, вычислительный блок 15, датчик 16 веса объекта, третий сумматор 17, третий усилитель 18, второй привод 19 вращения, датчик 20 тока.
Устройство работает следующим образом.
В соответствии с программой технологического цикла, хранящейся в блоке 1 задания программы, на первом его выходе появляется сигнал, соответствующий требуемому перемещению первого привода 4 вращения. Этот сигнал сравнивается в первом сумматоре 2 с сигналом от первого датчика 5 положения и сформированная ошибка U поступает через первый усилитель 3 на первый привод 4 вращения. Одновременно на втором выходе блока 1 задания программы появляется сигнал, соответствующий заданному перемещению привода 8 радиального перемещения, который приводит его в движение. Сигнал, пропорциональный ускорению д, формируется датчиком 10 ускорения и поступает на первый вход блока 15 вычисления сигналов коррекции.
В начальный момент движения промышленного робота датчик 16 веса объекта формирует сигнал, пропорциональный массе переносимого груза. Запись этого сигнала в блок 14 выборки-запоминания
(Л
С
о $ь о
00
ел
происходит через установленный интервал времени ti после начзла движения рабочего органа манипулятора. Время ц определяется инерционностью датчика 16 и составляет десятые-сотые доли миллисекунды.
Выходной сигнал блока 14 выборки-запоминания поступает на второй вход блока 15, на третий вход которого подается сигнал, пропорциональный координате радиального перемещения. Блок 15 формирует сигнал, пропорциональный динамическому моменту нагрузки, создаваемому инерционностью переносимого объекта:
U К m0g X2,
где К - масштабный коэффициент; гп0 - масса переносимого объекта; g- угловое ускорение; X2 - сигнал, пропорциональный координате радиального перемещения,
Этот сигнал поступает на второй вход третьего сумматора, где сравнивается с сигналом, поступающим с датчика 20 тока второго привода 19 вращения. Сигнал ошибки подается на вход третьего усилителя 18, который питает обмотки второго привода 19 вращения.
Первый и второй приводы 4 и 19 вращения связаны механически без редуктора между собой, что обеспечивает разделение канала программного управления и канала быстродействующей коррекции и высокую точность движения в динамических режимах работы промышленного робота.
Формула изобретения Устройство для управления промышленным роботом, содержащее последовательно соединенные блок задания
программы, первый сумматор, первый усилитель и первый привод вращения, связанный с датчиком ускорения и первым датчиком положения, выход которого подключей к второму входу первого сумматора, выход датчика ускорения подключен к первому входу блока вычисления сигналов коррекции, последовательно соединенные дифференциатор, выпрямитель, ждущий
мультивибратор и блок выборки и запоминания, подключенный вторым входом к выходу датчика веса объекта, а выходом соединенный с вторым входом блока вычисления сигналов коррекции, а также последовательно подключенные второй сумматор, второй усилитель и привод радиального перемещения, связанный с вторым датчиком положения, который соединен выходом с третьим входом блока вычисления сигналов
коррекции и первым входом второго сумматора, второй вход которого подключен к второму выходу блока задания программы, соединенного первым выходом с входом дифференциатора, отличающееся
тем, что, с целью повышения динамической точности, в него введены последовательно соединенные третий сумматор, третий усилитель, второй привод вращения и датчик тока, выход которого лодключен к первому входу третьего сумматора, соединенного вторым входом с выходом блока вычисления сигналов коррекции, причем валы первого и второго приводов вращения механически связаны между со5 бой, а электромеханическая постоянная времени второго привода вращения по крайней мере в два раза меньше, чем у первого.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления промышленным роботом | 1986 |
|
SU1349998A1 |
| Устройство для управления промышленным роботом | 1984 |
|
SU1170428A1 |
| Устройство для управления промышленным роботом | 1985 |
|
SU1271739A1 |
| Устройство для управления промышленным роботом | 1986 |
|
SU1472249A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ТРАНСПОРТНО-ПОГРУЗОЧНЫМ МАНИПУЛЯТОРОМ | 1990 |
|
RU2009883C1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Устройство для управления электроприводом промышленного робота | 1985 |
|
SU1265691A1 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| ЭЛЕКТРОПРИВОД С АВТОМАТИЧЕСКОЙ ПОДСТРОЙКОЙ ЧАСТОТЫ ВХОДНОГО ГАРМОНИЧЕСКОГО СИГНАЛА | 2008 |
|
RU2399079C2 |
| Устройство для управления роботом | 1988 |
|
SU1618636A1 |
Изобретение относится к робототехнике и может быть использовано при создании приборов прямолинейных роботов. Целью изобретения является повышение динамической точности. В устройство введен контур быстродействующей коррекции, содержащий сумматор, усилитель, датчик тока и второй привод вращения, электромеханическая постоянная времени которого по крайней мере в два раза меньше, чем у первого привода вращения. При этом валы первого и второго приводов механически связаны между собой. 1 ил.
| Устройство для управления промышленным роботом | 1986 |
|
SU1349998A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
