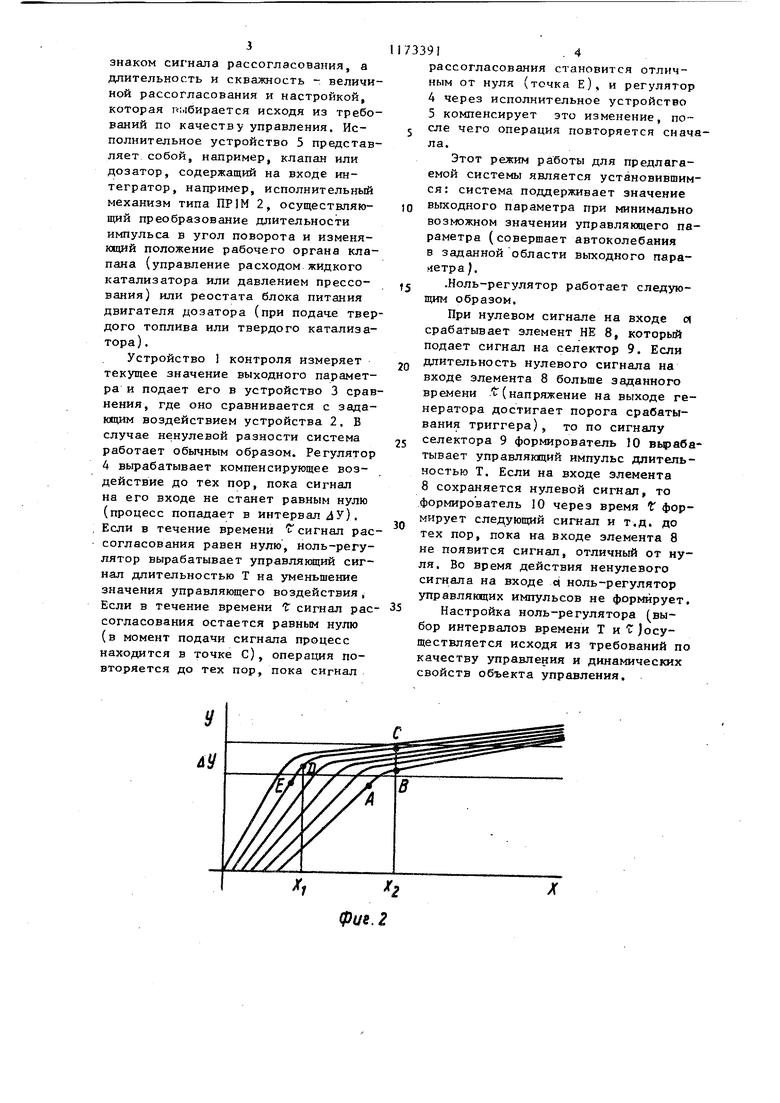
I Изобретение относится к системам автоматического управления и может быть использовано для автоматического управления объектами, имеклцими нелинейную статическую характеристику (между выходным и управлякицим параметрами). Цель изобретения - повьшение ка чества регулирования системы путем обеспечения минимально возможного значения управляющего параметра. На фиг. 1 и 2 изображены установившиеся режимы функционирования известной и предлагаемой систем автоматического управления; на фиг. 3 - блок-схема предлагаемой системы автоматического управления на фиг, 4 - блок-схема ноль-регулятора. Система содержит блок 1 контроля, задатчик 2, блок 3 сравнения, регулятор 4, исполнительное устрой ство 5, объект 6 управления и ноль регулятор 7, Ноль-регулятор 7 содержит элемент НЕ 8, селектор 9 и формирователь 10.I Система работает следующим образом. Существует целый ряд объектов управления, у которых зависимосгь между управляющим (х) и выходньм ( параметранк имеет нелинейньгй харак тер. Например, При управлении тампературой в топке расходом топлива с ростом расхода температура снача ла возрастает, а затем несколько снижается (за счет неполного сгора ния топлива), Чем вьше теплотворна способность топливаS тем быстрее возрастает температура и тем вьше максимальное значение (фиг. 1}. Пр брикетировании разлк-1ЯЬ х материало (шерсть, твердое тошпво, стружка и т.п.) плотность((прочность))брик кетов регулируют путем изменения д ления прессования. Вначале из мате риала удаляется воздух, и плотност возрастает быстро, затем по достижении двухфазного состояния (тверд вещество и влага) с ростом давлени прессования плотность возрастает незначительно за счет деформаций макрочастиц материала. Чем лучше деформационные свойства материала, тем быстрее возрастает плотность (фиг. 2 ). Аналогичную характеристи ку имеет выход химической реак912ции при управлении расходом катализатора. При управлении такими объектами зачастую возникает задача обеспечить выход объекта управления в заданном интервале лУ, причем этот интервал находится в зоне существенной нелинейности (фиг. 1 и 2), при управлении топкой нужно поддерживать в ней определенную, необходимую для хода технологического процесса температуру; при управлении прочностью брикетов ее значение нужно поддерживать на обеспечивающем сохранность в процессе транспортировки и хранения уровне, повышение же плотности (прочности )нецелесообразно и сопряжено со значительными энергозатратами; при управлении химическим процессом его целесообразно поддерживать на оптимальном уровне, т.е. в зоне, где отношение выхода реакции к затратам катализатора имеет максимум. При попадании процесса в точку А (фиг. 1 и 2) известная система переводит его в точку В. При попадании процесса в точку .В сигнал рассогласования становится равным нулю, и в дальнейшем, пока процесс находится в заданном интервале лУ, система состояния объекта управления не изменяет. В то же время в ходе, технологического процесса характеристики сырья изменяются, и процесс может перейти в точку С (улучшится теплотворная способность топлива, деформационные свойства материала, активность катализатора и т.п.). Так как процесс останется в заданном интервале, иззестная система управления состояния объекта не изменит. Однако заданную выходную характеристику объекта управления в новых условиях можно получить в точке D, а так как. значение управляющего параметра в этой точке меньше (х., x.j), то при стабилизации процесса в точке С неоправданно расходуются материало- и энергоресурсы. Блок 1 контроля представляет собой датчик, например, температуры, плотности или концентрации. В качестве задатчика 2, блока 3 сравнения и регулятора 4 можно использовать, например, приборы типа РПИК или РПИБ 2, вырабатывающие управлякяцее ;воздействие в виде импульса, полярность которого определяется знаком сигнала рассогласования, а длительность и скважность - величи ной рассогласования и настройкой, которая ,1бирается исходя из требований по качеству управления. Исполнительное устройство 5 представ ляет собой, например, клапан или дозатор, содержащий на входе интегратор, например, исполнительный механизм типа ПР1М 2, осуществляющий преобразование длительности импульса в угол поворота и изменяющий положение рабочего органа клапана (управление расходом жидкого катализатора или давлением прессования) или реостата блока питания двигателя дозатора (при подаче твер дого топлива или твердого катализатора) . Устройство контроля измеряет текущее значение выходного параметра и подает его в устройство 3 срав нения, где оно сравнивается с задающим воздействием устройства 2, В случае ненулевой разности система работает обычным образом. Регулятор 4 вьфабатывает компенсирующее воздействие до тех пор, пока сигнал на его входе не станет равным нулю (процесс попадает в интервал 1У), Если в течение времени fсигнал рас согласования равен нулю, ноль-регулятор вырабатывает управлякяций сигнал длительностью Т на уменьшение значения управляющего воздействия, Если в течение времени t сигнал рас согласования остается равным нулю (в момент подачи сигнала процесс находится в точке С), операция повторяется до тех пор, пока сигнал 91. 4 рассогласования становится отличным от нуля (точка Е), и регулятор 4через исполнительное устройство 5компенсирует это изменение, поеле чего операция повторяется сначала. Этот режим работы для предлагаемой системы является установившимся: система поддерживает значение выходного параметра при минимально возможном значении управляющего параметра (совершает автоколебания в заданной области выходного пара.четра. .Ноль-регулятор работает следующим образом. При нулевом сигнале на входе d срабатывает элемент НЕ 8, который подает сигнал на селектор 9, Если длительность нулевого сигнала на входе элемента 8 больше заданного времени (напряжение на выходе генератора достигает порога срабатывания триггера) , то по сигналу селектора 9 формирователь 10 вьрабатывает управляющий импульс длительностью Т. Если на входе элемента 8 сохраняется нулевой сигнал, то формирователь 10 через время f формирует следующий сигнал и т.д. до тех пор, пока ига входе элемента 8 не появится сигнал, отличный от нуля. Во время действия ненулевого сигнала на входе ci ноль-регул я тор управляющих импульсов не формирует. Настройка ноль-регулятора (выбор интервалов времени Т и t)осуществляется исходя из требований по качеству управления и динамических свойств объекта управления.
фие.З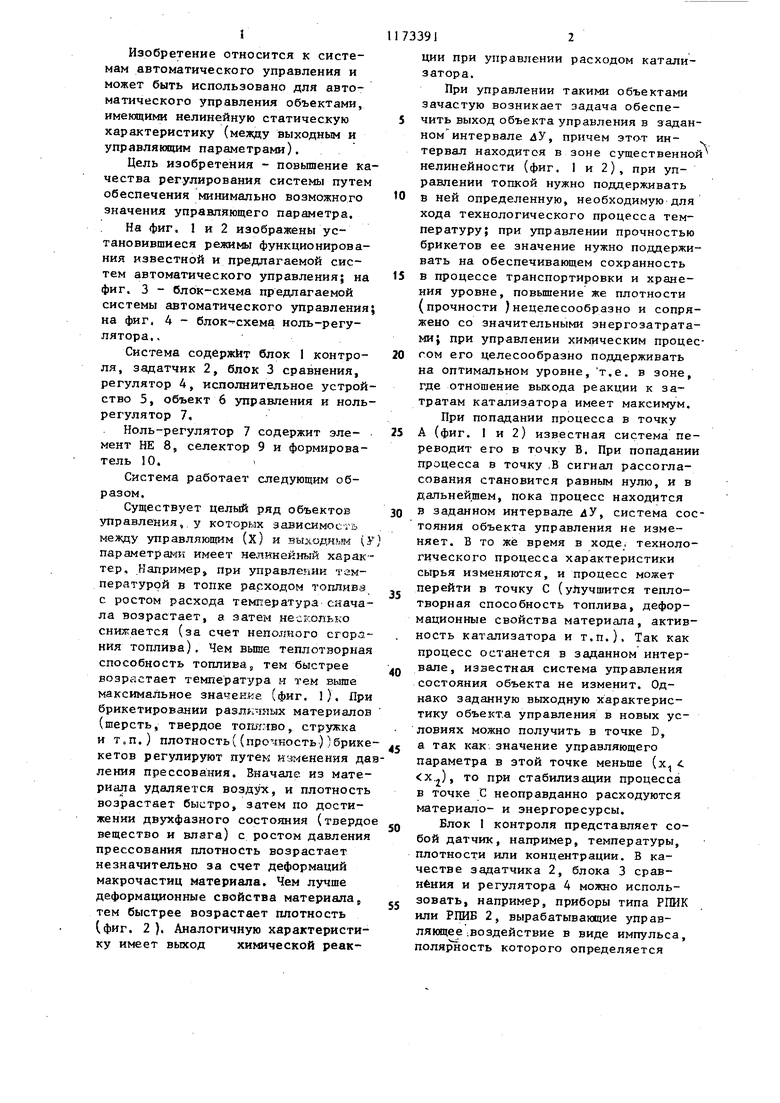
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2010 |
|
RU2446299C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2653262C2 |
| Способ адаптивного управления исполнительным механизмом | 2023 |
|
RU2821298C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2446298C1 |
| Способ резервирования электрогидравлической системы регулирования частоты вращения и устройство для его осуществления | 1983 |
|
SU1174579A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2002 |
|
RU2221929C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
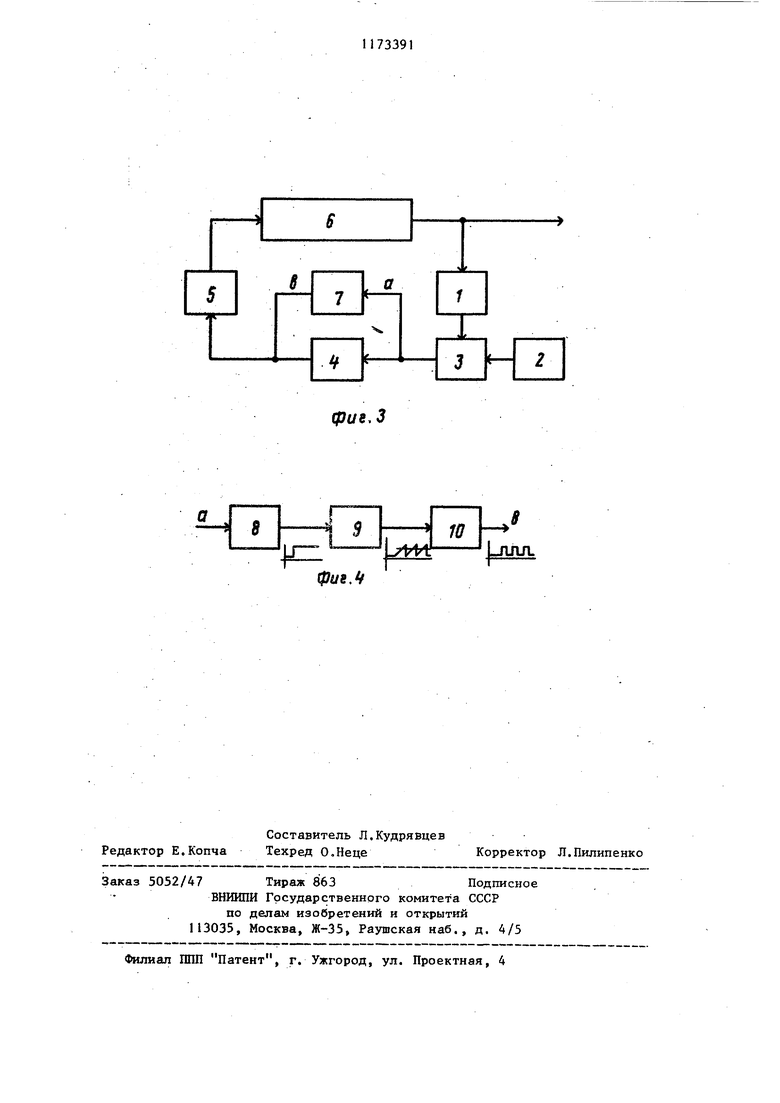
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, содержащая блок контроля и задатчик, входы которых подключены соответственно к первому и второму входам блока сравнения, соединенного выходом через регулятор с входом исполнительного устройства, выход которого соединен с входом объекта управления, вход бло-- ка контроля соедин.ен с выходом объекта управления, отличающаяся тем, что, с целью повышения качества регулирования системы путем обеспечения минимально возможного значения управляющего параметра, в нее введен ноль-регулятор, вход которого подключен к выходу блока сравнения, а выход - к входу сл исполнительного устройства. 09 00 ;о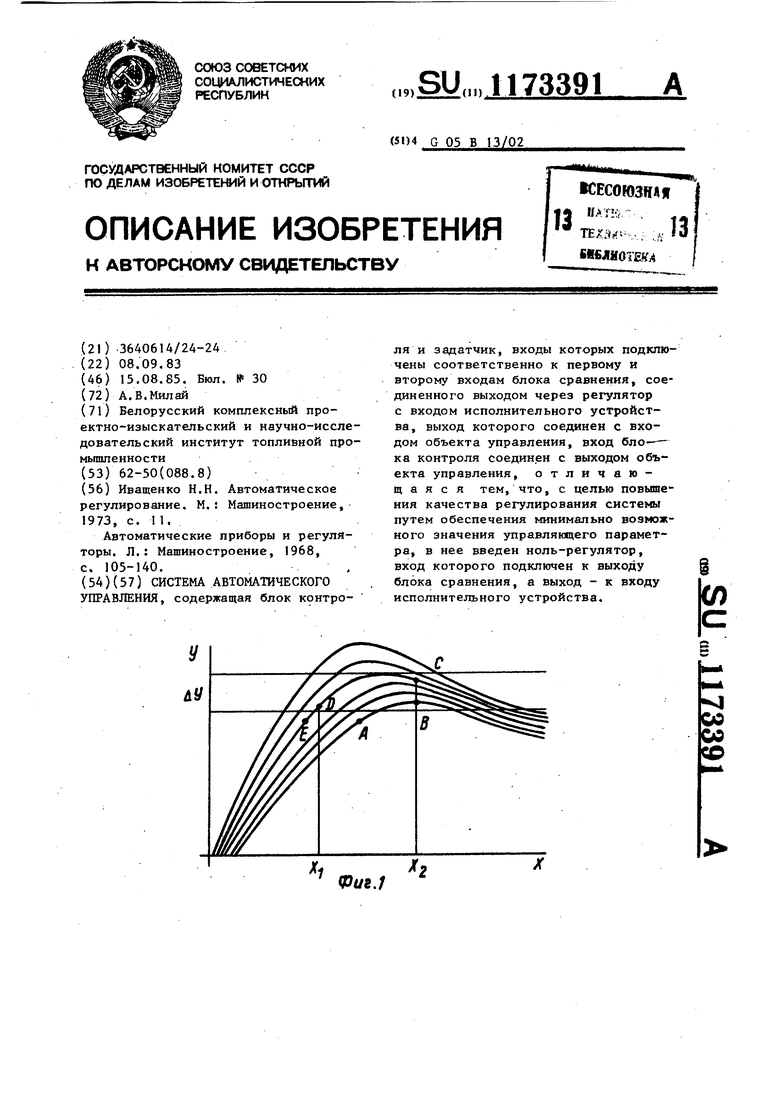
LmuL
| Иващенко Н.Н | |||
| Автоматическое регулирование | |||
| М.: Машиностроение,1973, с | |||
| П | |||
| Автоматические приборы и регуляторы | |||
| Л.: Машиностроение, 1968, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
