Изобретение относится к силоиэмерительной технике и может быть использовано при определении нагрузок, действующих на гидроманипулятор лесозаготовительных машин при проведеНИИ прочностных, функциональных и режимометрических испытаний.
Цель изобретения - упрощение и повышение точности определения нагружающих усилий, действующих на гидроманипулятор лесозаготовительной маГ1ИНЫ .
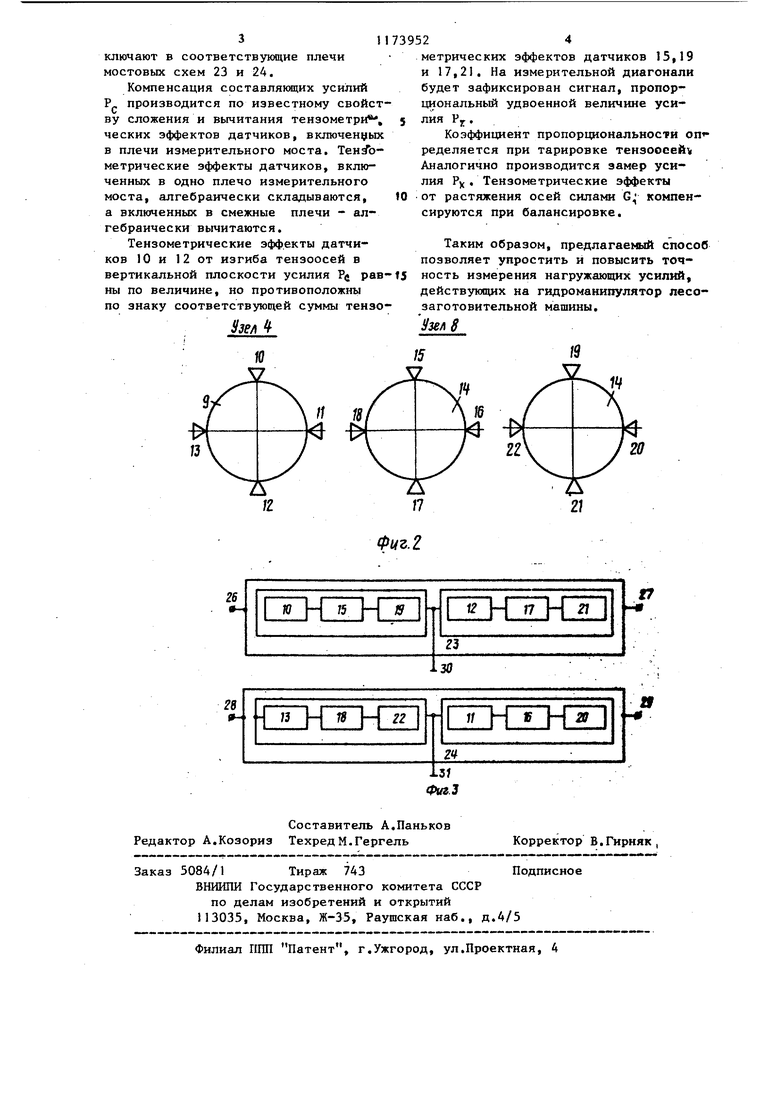
На фиг. 1 показана обв1ая блок-схема определения компонент нагружающих усилий лесозаготовительной машины с гидроманипулятором; на фиг.2 - схема размещения тензодатчиков на тензоося на фиг. 3 - мостовые схемы соединения тензодатчиков.
Лесозаготовительная машина имеет базовое шасси 1, на котором установлен гидроманипулятор, состоящий из поворотной колонны 2, стрелы 3, сочлененной с колонной посредством шарнира 4, рукоятки 5, рабочего органа 6, например, в виде захватносрезающего устройства вариант валочно-трелевочной маишны ЛП-17А), а также в лючающий систему гидропривода, в которую входят два гидроцилиндра 7 поворота стрелы 3. Гидроцилиндры 7 сочленены с колонной 2 посредством шарнира 8 и расположены параллельно один относительно другого, что соответствует лесозаготовительной мапшне ЛП-17А.
Шарнирное сочленение 4 стрелы 3 с колонной 2 выполняется в виде тензометрической оси 9 с наклеечными на ее поверхность тензодатчиками 10-13, а шарнирное сочленение 8 между гидроцилиндрами 7 и колонкой 2 выполняется в виде тензоосей 14 с компенсаторными тензодатчиками 15-18 и 19-22.
Все датчики соединены между со- , бой в мостовые измерительные схемы 23 и 24 и посредством каналов связи подключены к измерительнорегистрирующему комплексу (ИРК 25.
Выводы 26-29 подключены к рабочим плечам измерительных мостов, выводы 30 и 31 - к измерительной . диагонали.
Способ осуществляется следующим образом.
В шарнирном сочленении 4 стрелы 3 колонной 2 вертикальные и горизбнтальные составляющие усилий и,и U рассчитываются следуюпщм образом:
и, - P.CosCf+EG -
(1) и (, SinCf- РХ ,
де G - веса элементов манипулятора;
Р - усилия от гидроцилиндров 7 стрелы, действующие на шарнирное соединение 8. If - угол наклона гидроцилиндров 7 стрелы к колонне 2; Р и Р - горизонтальные и вертикальные составляющие эксплуатационных усилий, нагружающих манипулятор.
Вертикальные и горизонтальные оставляющие усилий в шарнире 8 соченения гидроцилиндров стрелы 3 с олонной .2 определяются формулами
tf, P.CpsQ; (3)
. 4-2 PC f
Ha тензометрическую ось 9 наклеиают тензодатчики 10-13 по направению измеряемых компонент усилий. ля определения Р служат датчики 0 и 12, для Р - датчики 11 и 13.
Входящие в выражения (1) и 1.2 ) -. составляющие компонент усилий Р Cos(f и Рр- sintf относятся к неизмеряемым усилиям, поэтому, чтобы исключить их влияние при замере, вводятся дополнительные тензометрические оси 9 с датчиками, компенсирующими усилия Р Созц и Р|. -Sincj.
В варианте исследуемой машины ЛП-17А введены две дополнительные теизометрические оси 9, количество которых в данном случае определяется количеством параллельно располо- женных гидроцилиндров 7 поворота стрелы 3.
На дополнительные тензооси 9 наклеены восемь компенсаторных тензодатчиков 15-22 для неизмеряемьгх составляющих усилий Р.
Вертикальные составляющие усилия Р компенсируются датчиками 15,19 и 17,21, горизонтальные составляющие - датчиками 18,22 и 16,20.
Дополнительные тензометрические оси 9 монтируют в шарнирных соединениях гидроцилиндров поворота стрелы 3 с колонной 2. Каналы связи компенсаторных теизодатчиков под3яключают в соответствующие плечи мостовых схем 23 и 24. Компенсация составлякмцих усилий Р производится по известному свойст ву сложения и вычитания тенэометри, ческих эффектов датчиков, включeн ыx в плечи измерительного моста. ТенЛ)метрические эффекты датчиков, включенных в одно плечо измерительного моста, алгебраически складываются, а включенных в смежные плечи - алгебраически вычитаются. Теизометрические эффекты датчиков 10 и 12 от изгиба тензоосей в вертикальной плоскости усилия Р рав ны по величине, но противоположны по знаку соответствующей суммы тензо
и
Иш8
W
2J 24 метрических эффектов датчиков 15,19 и 17,21. На измерительной диагонали будет зафиксирован сигнал, пропорциональный удвоенной величине уси- ЛИЯ Pjr. Коэффициент пропорциональности оп ределяется при тарировке тензоосей) Аналогично производится замер усилия Ру, Тензометрические эффекты от растяжения осей силами G| компенсируются при балансировке. Таким образом, предлагаеьялй способ позволяет упростить и повысить точность измерения нагружающих усилий, действующих на гидромаиипулятор лесозаготовительной машины.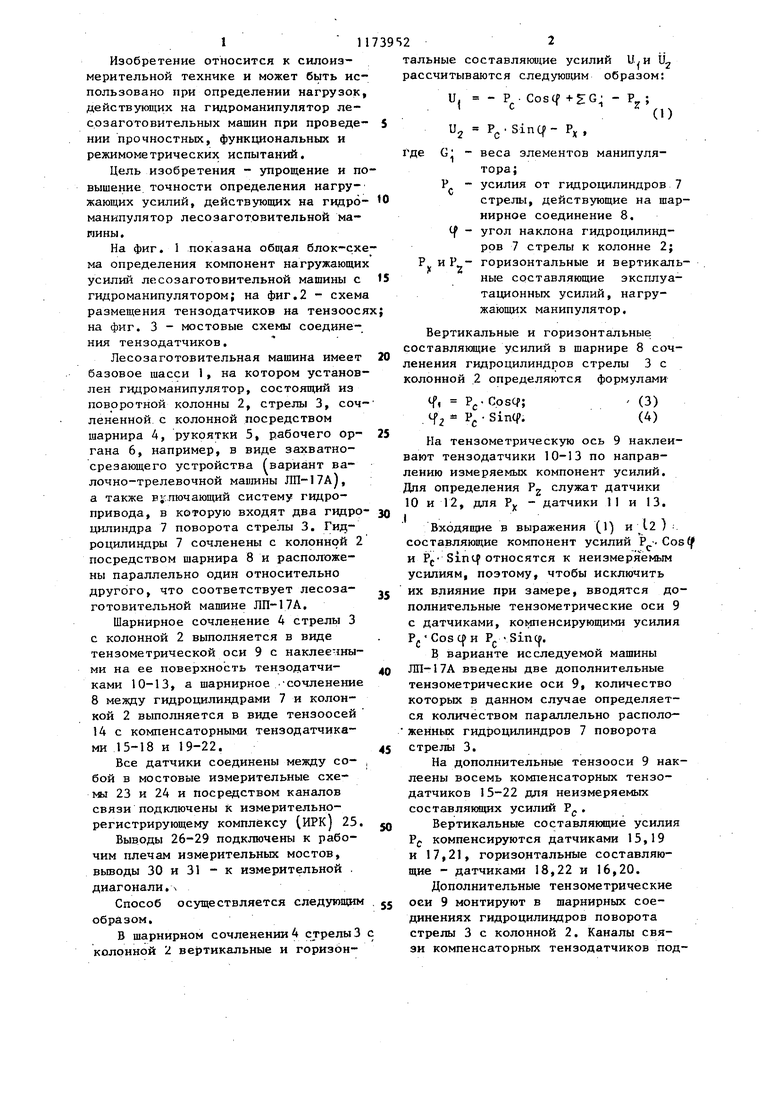
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК | 1999 |
|
RU2159415C2 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2116025C1 |
| Лесозаготовительная машина | 1984 |
|
SU1291075A1 |
| Лесозаготовительная машина | 1983 |
|
SU1159515A1 |
| Тензодинамометр для измерения тяговых усилий в круглозвенных цепях | 1980 |
|
SU866426A1 |
| Гидропривод манипулятора лесозаготовительной машины | 1978 |
|
SU697100A1 |
| Почвенный канал | 1988 |
|
SU1640576A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1998 |
|
RU2130249C1 |
| СПОСОБ НАПРАВЛЕННОЙ ВАЛКИ ДЕРЕВЬЕВ | 2013 |
|
RU2540544C2 |
| Устройство для определения тягового сопротивления навесных сельскохозяйственных машин | 1984 |
|
SU1175375A1 |
СПОСОБ ОПРЕДЕЛЕНИЯ НАГРУЖАОДИХ УСИЛИЙ НА РАБОЧИЙ ОРГАН ГИДРОМАНИПУЛЯТОРА ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШНЫ, состоящего из колонны, стрелы с гидроцилиндрами поворота и; рукоятки, осуществляемый путем крепления в узлах сочленения деталей гидроманипулятора тензодатчиков, установленных во взаимно перпендикулярных плоскостях и соединенных в измерительную мостовую схему, отличающийся тем, что, с целью упрощения и повышения точности определения нагружающих усилий, компоненты нагружающих усилий измеряют 9 узлах сочленения колЬнны и стрелы гидроманипулятора, а также колонны и гидроцилиндров поворота стрелы, при этам в измерительной мостовой О схеме компенсируют влияние неизме- в ряемых усилий, действующих в узлах сочленения колонны с гидроцилиндрвми поворота стрелы. 00 ;о ел tc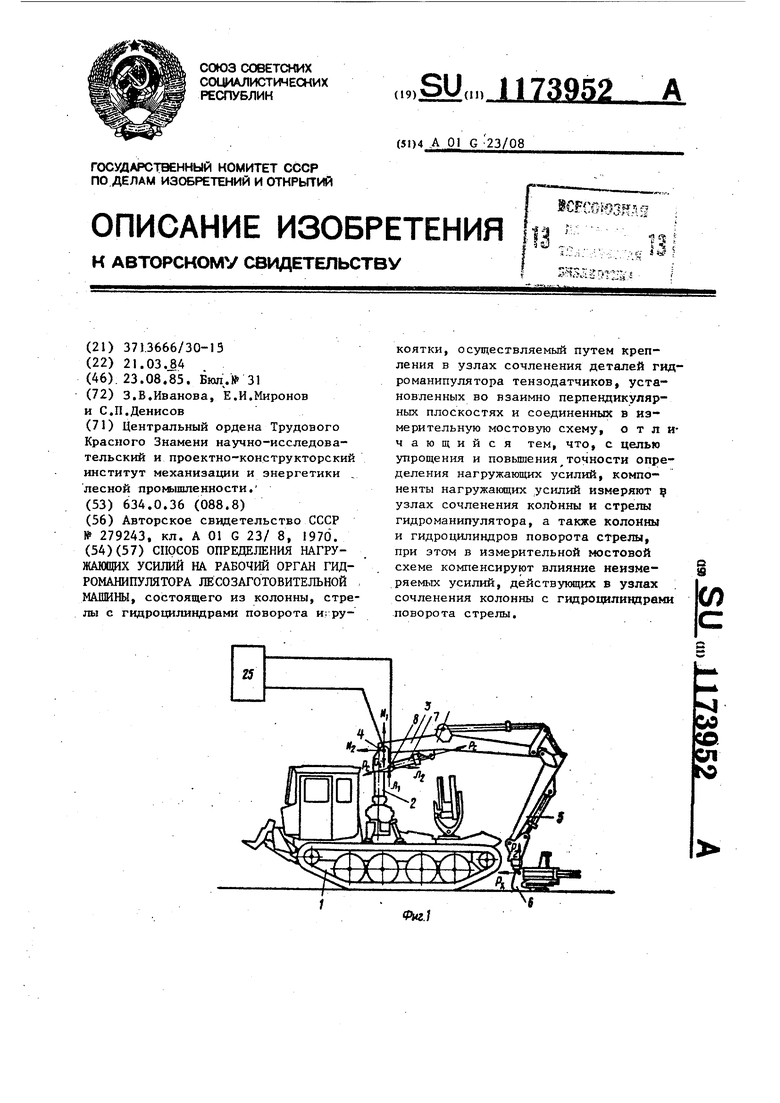
26
17
| СТРЕЛА ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 0 |
|
SU279243A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
