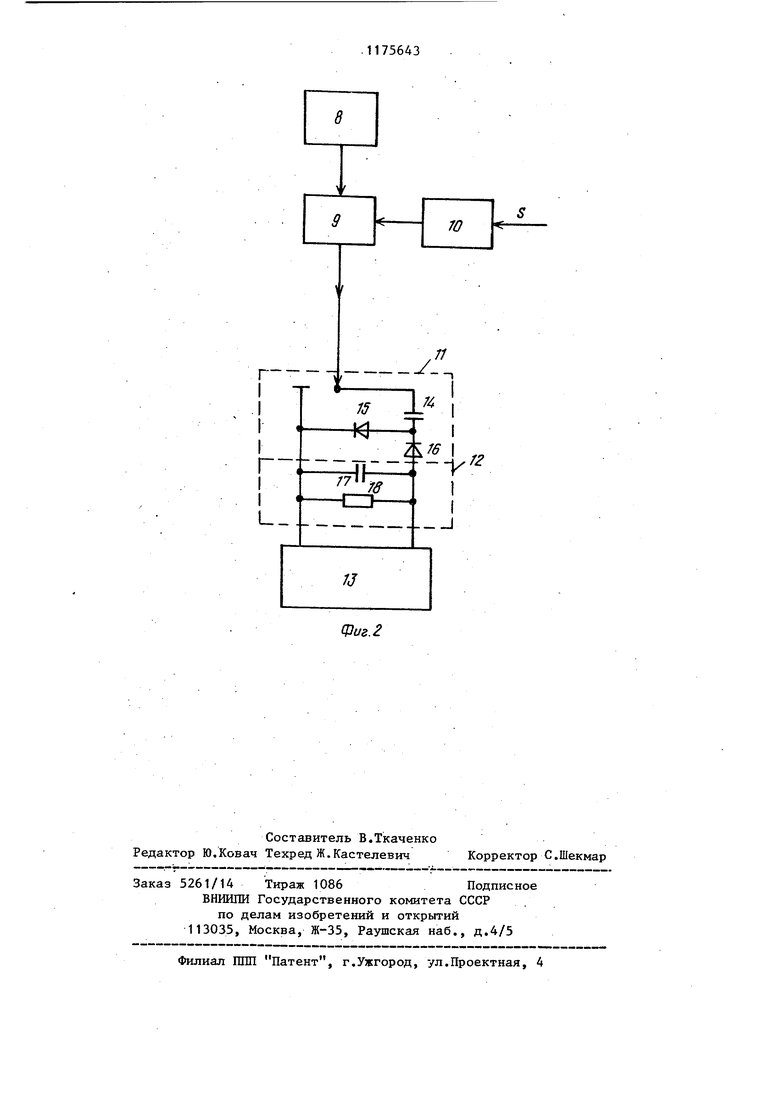
Изобретение относится к сварке и может быть использовано в контактных сть ковых сварочных машинах. Цель изобретения - повышение точности контроля и измерения перемещения подвижной плиты контактных машин На фиг.1 схематически показан предлагаемый датчик, общий вид в разрезе j на фиг.2 - электрическая принципиальная схема подключения датчика Датчик (фиг.1) состоит из наружного металлического цилиндра 1, в кото ром с заданным шагом сделаны поперечные ребра, внутреннего металлического цилиндра 2 с аналогичными ребрами оси 3- подшипников 4 и 5. скольжения корпуса 6 и изоляционной прокладки 7 Цилиндры 1 и 2 образуют коаксиальньш конденсатор. Цилиндр 2 закреплен на .оси 3,которая продольно перемещается в подшипниках 4 и 5, установленных в корпусе 6. Представленная на фиг.1 конструкция датчика пригодна для измерения и контроля линейных перемеш;е ний подвижной.плиты машины. В случае необходимости измерения угловых .перемещений в цилиндрах 1 и 2 следует сделать продольные ребра (вдоль оси цилиндров). В этом случае цилиндр 2 при повороте подвижной плиты машины будет поворачиваться на соответствую щий угол относительно цилиндра 1. Схема подключения датчика (фиг.2) состоит из генератора 8 переменного тока, измерительного моста 9, датчика 10 перемещения, линейного детектора 11, фильтра 12 ирегистрирующего прибора 13. Генератор 8 переменного тока представляет собой стандартный блок. Измерительный мост 9 также собирается по Стандартной схеме, линейный детектор 11 состоит из конденсатора 14 и двух диодов 15 и 16. Фильтр 12 включает в себя конденсатор 17 и ре- зистор 18. В качестве регистрирующего прибора 13 можно испольэова-хь быстродействующий самопишущий прибор типас,Н338. Выход генератора 8 связан с входом моста 9, в одну из диагоналей; которого включен емкостной датчик 10. Выход моста 9 через последовательно соединенные детектор 11 и фильтр 12 связан с входом регистрирующего прибора 13. Устройство работает следующим образом. 1 32 Ось 3 емкостного датчика 10 перемещений жестко соединяется с подвижной плитой стыковой сварочной машины, а корпус 6 датчика 10 связан с неподвижной станиной. Цри движении подвижной плиты машины ось 3 с закрепленным на ней ребристым цилиндром 2 перемещается внутри ребристого цилиндра 1. Известно, что емкость коаксиального конденсатора при больших значениях диаметров цилиндров и малом зазоре между их поверхностями с достаточно большой степенью точности можно определить как ёмкость плоского конденсатора. При этом, когда ребра цилиндров 1 и 2 находятся напротив друг друга, емкость конденсатора будет максимальной, а при перемещении цилиндра 2 относительно цилиндра 1 их ребра будут взаимно смещаться и, когда ребра цилиндра 2 займут положения напротив проточек цилиндра 1, емкость конденсатора станет минимальной. Если проточки в цилиндрах выполнить равномерно, то максимальное изменение емкости датчика в процессе взаимного перемещения цилиндров 1 и 2 .будет определяться выражением где К - отношение зазоров между про-точками Ивыступающими ребрами этих цилиндров (). При изменении емкости датчика 10 на выходе моста 9 происходит соответствующее изменение сигнала, который после прохождения через линейный детектор 11 и фильтр 12 регистрируется прибором 13. В процессе перемещения подвижной плиты машины на выходе устройства регистрируется циклически изменяющийся гармонический сигнал с периодом повторения Т. Непрерьтность сигнала,.соответствующего перемещению плиты машины, позволяет оператору по записям при- бора 13 анализировать характер перемещения и вычислять скорость перемещения в пределах величины хода машины с точностью до Т/4 периода модуляции емкости датчика 10, а также с высокой точностью фиксировать момент начала осадки и определить ее ско}рость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления машиной контактной стыковой сварки оплавлением | 1985 |
|
SU1255337A1 |
| Устройство для контроля скорости осадки при контактной стыковой сварке | 1981 |
|
SU963760A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВЛАЖНОСТИ ДВИЖУЩИХСЯ ПОЛОТНООБРАЗНЫХ МАТЕРИАЛОВ | 2007 |
|
RU2342650C1 |
| УСТРОЙСТВО ДЛЯ КОНТАКТНОЙ СТЫКОВОЙ СВАРКИ С ПРЕДВАРИТЕЛЬНЫМ ПОДОГРЕВОМ ИЗДЕЛИЙ КОЛЬЦЕВОГО ЗАМКНУТОГО ПРОФИЛЯ КОМПАКТНОГО СЕЧЕНИЯ | 2010 |
|
RU2433895C1 |
| Устройство управления машиной для контактной стыковой сварки оплавлением | 1989 |
|
SU1731528A2 |
| Машина для контактной стыковой сварки | 1978 |
|
SU745618A1 |
| Электронный влагомер | 1978 |
|
SU744305A1 |
| Электромеханический датчик линейных перемещений | 1990 |
|
SU1819201A3 |
| Машина для контактной стыковой сварки оплавлением | 1986 |
|
SU1344544A1 |
| Способ контроля скорости и перемещения подвижной плиты стыковой сварочной машины | 1986 |
|
SU1447603A1 |
ДАТЧИК ВЕЛИЧИНЫ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ПРИ КОНТАКТНОЙ СТЫКОВОЙ СВАРКЕ, содержащий два коаксиальных металлических цилиндра, о т л и ч а ю щ и и с я тем, что, с целью повышения точности измерения, на поверхностях обоих цилиндров, обращенных друг к другу, вьшолнены ребра с равномерным шагом. , (Л к СП Од 4ib CQ
(Риг. 2
| Электротехническая промышленность | |||
| Сер | |||
| Электросвязь, 1982, вып | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
