L ГГ
9)
j;
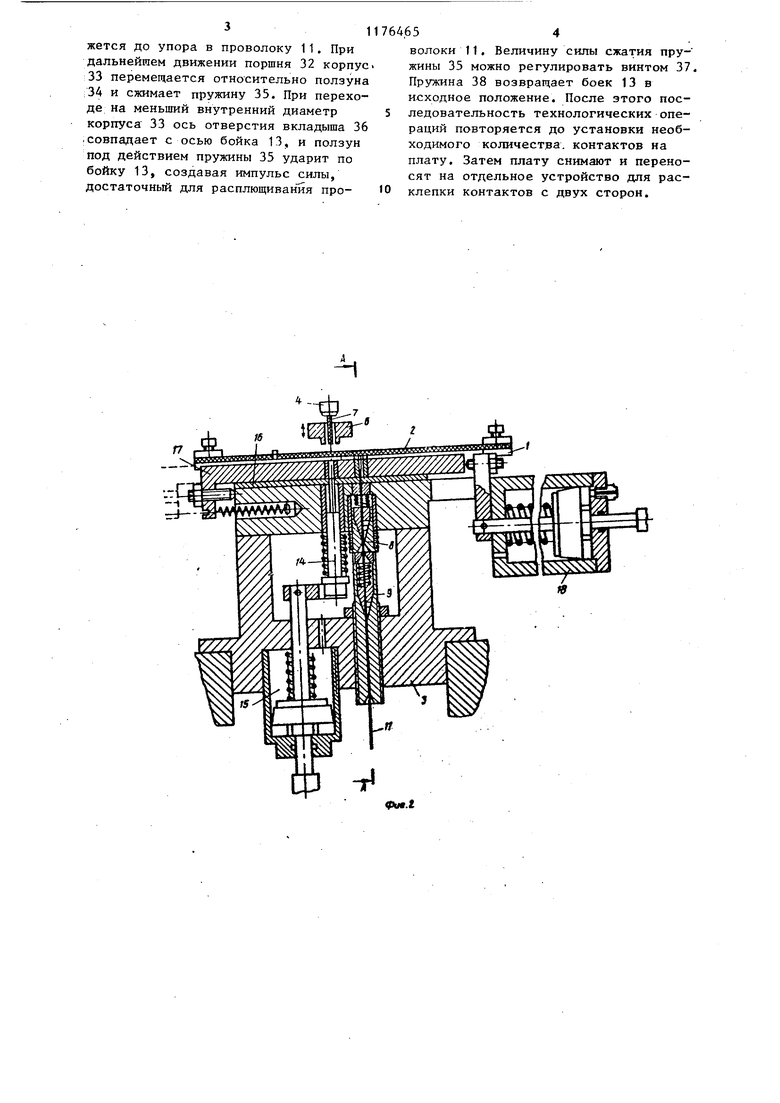
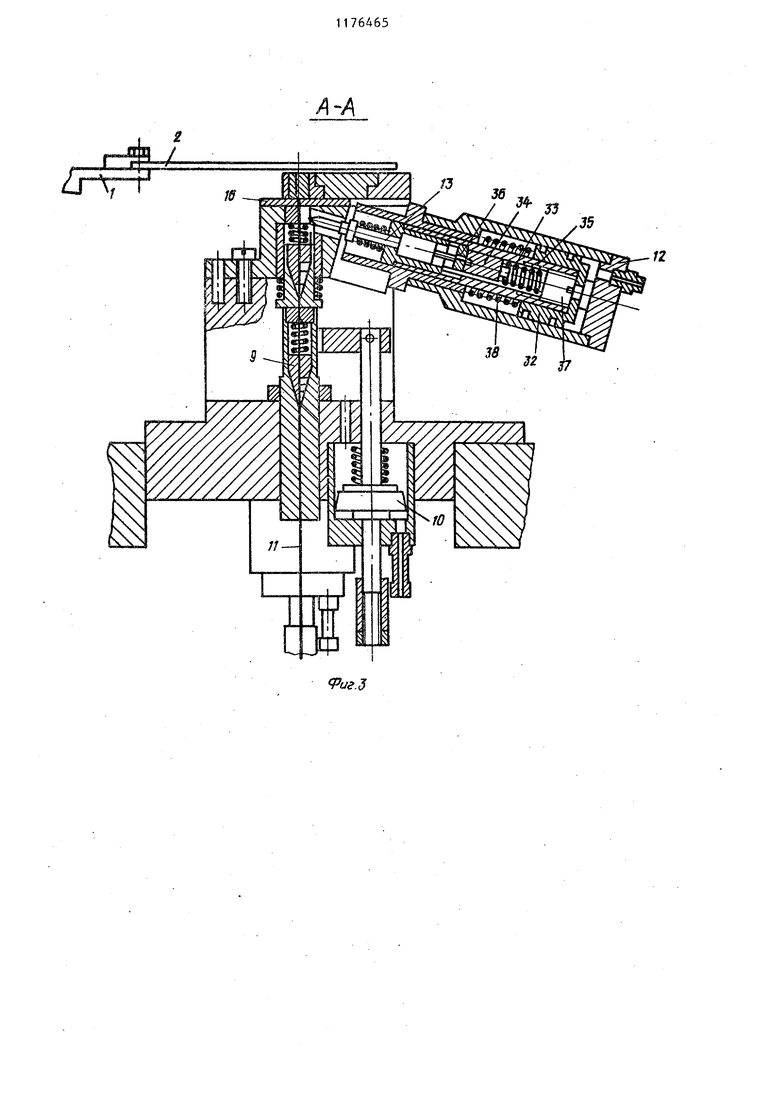
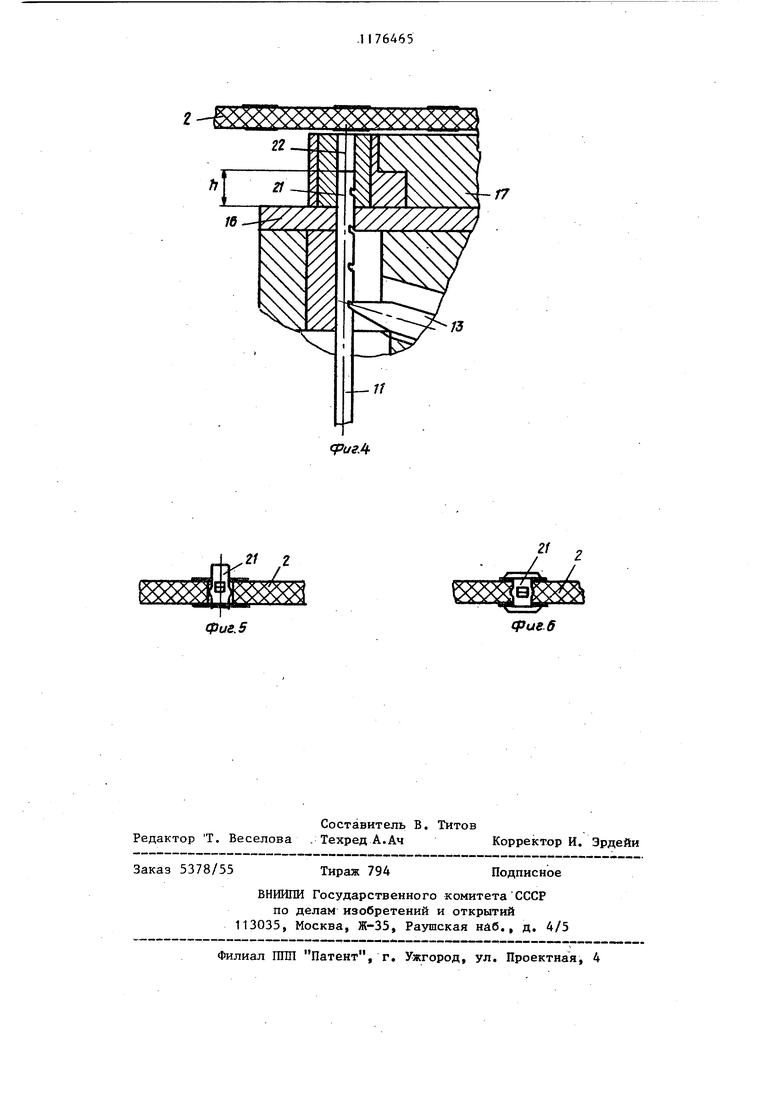
О) СП 1 Изобретение относится к радиотехнике и может быть использовано для сборки преимущественно двухсторонних печатных плат. Цель изобретения - повышение надежности установки контактов путе предварительного расплющивания контактов, На фиг, 1 изображена кинематическая схема устройства; на фиг. 2механизмы сверления отверстий, уста новки проволочного контакта в отвер стие печатной длаты и подачи проволоки, разрез; на фиг, 3 - механизмы расплющивания проволочного контакта и подачи проволоки, разрез А-А на фиг 2; на фиг„ 4 - узел образовани проволочного контакта в увеличенном масштабе; на фиг.5 - проволочный контакт, установленный в отверстие платы; на фиг, 6 - проволочный контакт после расклепки. Устройство содержит подвижный в горизонтальной плоскости стол 1, предназначенный для крепления обраб тываемой платы 2, основание 3, С верхней стороны платы 2 установлен механизм сверления отверстий, содер жащий сверлильную головку 4, электр двигатель 5, прижимное устройство 6 и режущий инструмент - сверло 7. С нижней стороны стола 1 укреплен механизм подачи проволоки, состоящий из фиксирующей цанги 8 и подающей цанги 9, которая имеет возможность вертикального перемещения посредством пневмопривода 10. Под углом к оси перемещения проволоки 11 перед механизмом обрезки контакта от проволоки установлен механизм расплющивания , содержа1дий пневмопривод 12 и боек 13, Рядом с механизмом подачи проволоки установлен механиз установки проволочного контакта в отверстие платы, который содержит установленньш с возможностью вертикального перемещения выталкиватель и пневмопривод 15, при зтом выталки ватель 14 установлен соосно со свер лом 7. На основании 3 установлен механизм обрезки контакта от прово локи, содержащий прикрепленную неподвижно к основанию планку 16 с отверстиями для прохода контакта и подвижную плиту 17с пневмоприводом 18, В плите 17 также имеются отверс тия для прохода контакта, причем плита 17 плотно прижата к планке 16 52 Координатное перемещение платы 2 обеспечивают приводы 19 и 20, Все механизмы кинематически между собой связаны и работают синхронно от пульта управления (не показан) по заданной программе, составленной для обработки одной платы. Практически могут быть составлены несколько программ для последовательной обработки нескольких различньж плат. Устройство работает следующим образом. На столе 1 закрепляется обрабаты-( ваемая плата 2, а механизм подачи проволоки заправляется проволокой 11, При работе устройства в автоматическом режиме по заданной программе обрабатываемая плата 2 посредством приводов 19 и 20 перемещается и останавливается в заданном положении установки проволочного контакта на плате 2, Одновременно с перемещением платы 2 при помощи пневмопривода 10, цанги 9 и цанги 8 подается проволока 11 на величину, равную длине контакта. При этом проволока проходит через отверстие в планке 16 и подвижной плите 17. По следующей команде подвижная плита 17 под воздействием пневмопривода 18 передвигается влево. При этом проволочный контакт 21 размером h отрезается от проволоки -11 и остается в отверстии 22 плиты 17 и при дальнейшем движении.устанавливается соосно с выталкивателем 14 и сверлом 7. Затем прижимное устройство 6 посредством привода, включающего двигатель 23, червячную пару 24, муфту 25, вал 26, зубчатую передачу 27, кулачок 28 и рычаг 29, осуществляет прижим платы 2 к подвижной плите 17. От этого же привода посредством кулачка 30 и рычага 31 опускается сверлильная головка 4 и сверло 7, Просверливается отверстие в плате 2, После сверления отверстия сверлильная головка 4 возвращается в исходное положение. Затем посредством пневмопривода 15 выталкиватель 14 перемещает предварительно расплющенный в средней части контакт 21 в отверстие платы 2. После этого выталкиватель 14 и прижимное устройство 6 возвращаются в исходные положения. Одновременно с выталкивателем 14 срабатывает механизм расплющивания контакта. Под воздействием пневмопривода 12 боек 13 дви31
жется до упора в проволоку 11. При дальнейшем движении поршня 32 корпус
33перемещается относительно ползуна
34и сжимает пружину 35. При переходе на меньший внутренний диаметр корпуса 33 ось отверстия вкладыша 36
.совпадает с осью бойка 13, и ползун под действием пружины 35 ударит по бойку 13, создавая импульс силы, достаточный для расплющивания про764,654
волоки 11. Величину сипы сжатия пружины 35 можно регулировать винтом 37. Пружина 38 возвращает боек 13 в исходное положение. После этого пос5 ледовательность технологических операций повторяется до установки необходимого количества, контактов на плату. Затем плату снимают и переносят на отдельное устройство для рас0 клепки контактов с двух сторон.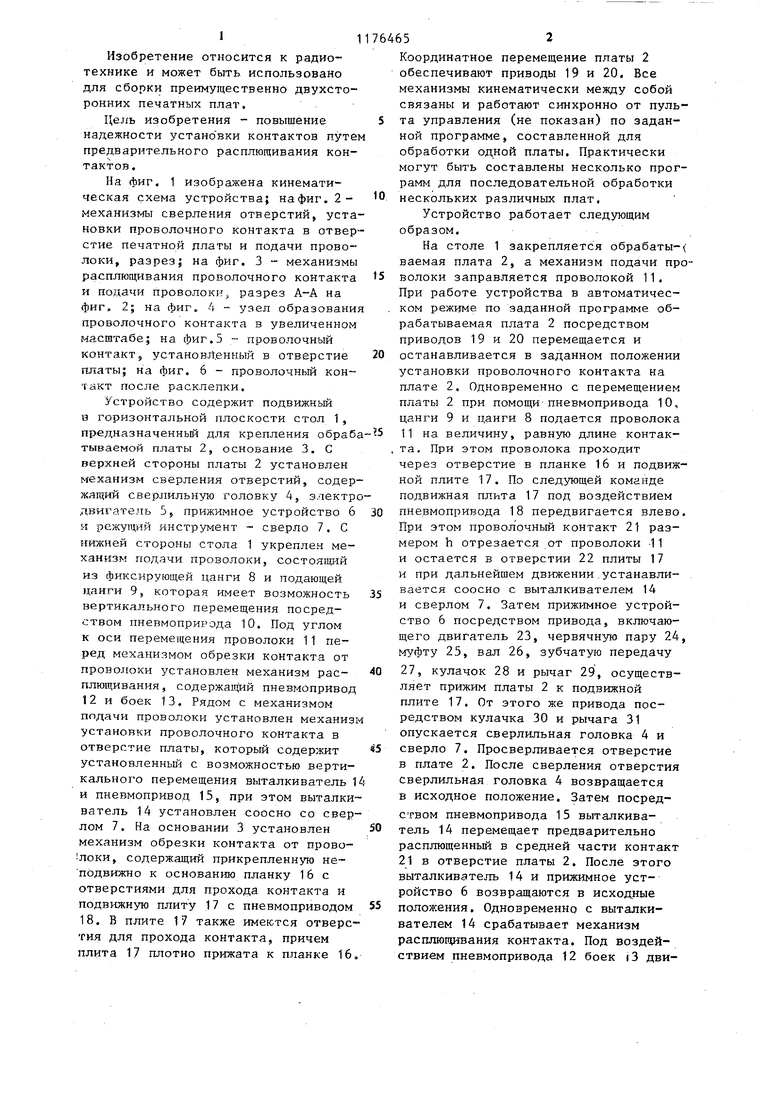
| название | год | авторы | номер документа |
|---|---|---|---|
| Сверлильный станок | 1982 |
|
SU1047610A2 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ПРОВОЛОЧНЫХ КОНТАКТОВ НА МОНТАЖНЫЕ ПЛАТЫ | 1971 |
|
SU301885A1 |
| Устройство для контроля пере-ХОдНыХ СОЕдиНЕНий дВуСТОРОННиХ пЕ-чАТНыХ плАТ | 1979 |
|
SU847534A1 |
| Устройство для установки проволочных контактов на монтажные платы | 1972 |
|
SU503567A3 |
| Автомат для ударной конденсаторной сварки | 1988 |
|
SU1549705A1 |
| Станок для сверления печатных плат | 1979 |
|
SU841798A1 |
| Устройство для подачи заготовок из проволоки | 1973 |
|
SU462641A1 |
| Устройство для вырезки отверстий и трепанов | 2019 |
|
RU2710256C1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ ЩЕТОК | 1973 |
|
SU364306A1 |
| Устройство для установки контактных штырей на печатную плату | 1986 |
|
SU1450156A1 |
УСТРОЙСТВО ДЛЯ УСТАНОВКИ ПРОВОЛОЧНЫХ КОНТАКТОВ НА ПЛАТУ, еодержащее размещенные на оеновании и еоединенные с приводом механизмы подачи плат, подачи проволоки, обрезки проволочного контакта и установки контакта в отверстия платы, отличающееся тем, что, е целью повышения надежноети установки контактов, оно снабжено механизмом предварительного расплющивания контакта, выполненного в виде бойка и установленного перед механизмом обрезки контакта под углом к оси проволоки.
} uj).-„д V
г-- ххххжх о5о ххх ооо
(ригЛ
IS
фие.5
(риеб
