Изобретение относится к судостроению, а именно к системам управления судна на воздушной подушке. Целью изобретения является упрощение-конструкции и уменьшение веса системы. На фиг.1 изображена схема системы управления судна на воздушной подушке, судно стоит на месте; на фиг.2 то же, судно движется вперед; на фиг.З - то же, судно разворачивается Система управления судна на воздушной подушке,имеющего воздушные винты регулируемого шага (нафиг„ не показанвО, содержит шарнирно установ ленную колонку 1, две педали 2, закрепленные на штанге 3, установленной на оси 4 в ее средней части, рычаги 5 и 6 и механизм поворота лопастей винтов регулируемого шага, имеющий тяги 7 и 8. Причем колонка 1 и педали 2 взаимосвязаны между собой указанными приводом.Система управления выполнена с двумя направляющими 9 и 10, каждая из которых снабжена подвижным шарниром 11 и 12 соответствен но. Механизм поворота лопастей винто регулируемого шага вьтолнен с двумя гибкими приводами 13 и 14 с силовыми сердечниками возвратно-поступательного перемещения, каждьй из которых одним своим кондом соединен с одним из рычагов 5 или 6, а другим - с подвижным шарниром 11 или 12. Каждый подвижный шарнир 11 и 12, кроме того связан с штангой 3 посредством тяги 7 или 8 механизма поворота лопастей винтов регулируемого шага. Шарнирно установленная колонка 1 вьшолнена в виду двух труб, свободные концы которых жестко связаны между собой, и содержит рулевое колесо 15 с рулевым механизмом 16, гиб кий привод 17 воздушных рулей и орга управления 18 оборотами двигателя. Каждый из двух гибких приводов 13 и 14 содержит.оплетку с силовым сердеч ником возвратно-поступательного пере мещения, шток 19, шарнирно соединенньй с колонкой 1, направляющую трубку 20, установленную на одном из под вижных шарниров (11), шток 21, шарнирно соединенньм с одним из рычагов (5) управления лопастей винтов регулируемого шага, направляющую трубку 22, установленную на одном из неподвижных шарниров 23. Каждая направляющая трубка 20 и 22 жестко связана с оплеткой гибкого привода 13, а штоки 19 и 21 жестко связаны с силовым гибким сердечником. Каждый гибкий привод имеет хотя бы один изогнутый участок. Система управления работает следующим образом. Когда колонка 1 установлена в вертикальном положении, штоки 19 по отношению к направляющим трубкам 20 наполовину вьщвинуты. Подвижные шарниры 11 и 12 находятся посередине направляющих 9 и 10. Штоки 21 по отношению к направляющим трубкам 22 наполовину вьщвинуты. Рычаги 5 и 6 системы управления находятся в среднем положении, при этом лопасти винтов развернуты так, что не создают тягу, и судно в результате стоит на месте. Когда колонка 1 отклонена вперед, штоки 19 по отношению к направляющим трубкам 20 полностью выдвинуты. Подвижные шарниры 11 и 12 находятся посредине направляющих 9 и 10. Штоки 21 по отношению к направляющим трубкам 22 втянуты. Рычаги 5 и 6 повернуты вправо, что соответствует полному положительному углу атаки лопастей винтов регулируемого шага, и судно движется вперед. При отклонении колонки 1 назад (показано пунктиром на фиг.2) рычаги 5 и 6 повернуты влево, что соответствует отрицательному углу атаки лопастей винтов регулируемого шага, и судно движется назад. Когда колонка 1 установлена в вертикальном положении, педаль 2 справа передвинута вперед, а слева назад (педали 2 повернуты против часовой стрелки), подвижньй шарнир 12 тягой 8 перемещается вперед, а шарнир 11 тягой 7 - назад, при этом шток 19 справа вдвинут в правую направляющую трубку 20, а слева выдвинут. Соответственно щток 21 справа выдвинут из правой направляющей трубки 22, а слева - вдвинут. Рычаг 5 поворачивается вправо, а рычаг 6 - влево. Такое положение рычагов 5 и 6 соответствует положительному углу атаки левого винта и отрицательному углу атаки правого, В зтом случае судно разворачивается в правую сторону. При повороте педалей 2 по часовой стрелке на оси 4 (показано пунктирон на фиг.З) судно разворачивается в левую сторону.
1178036
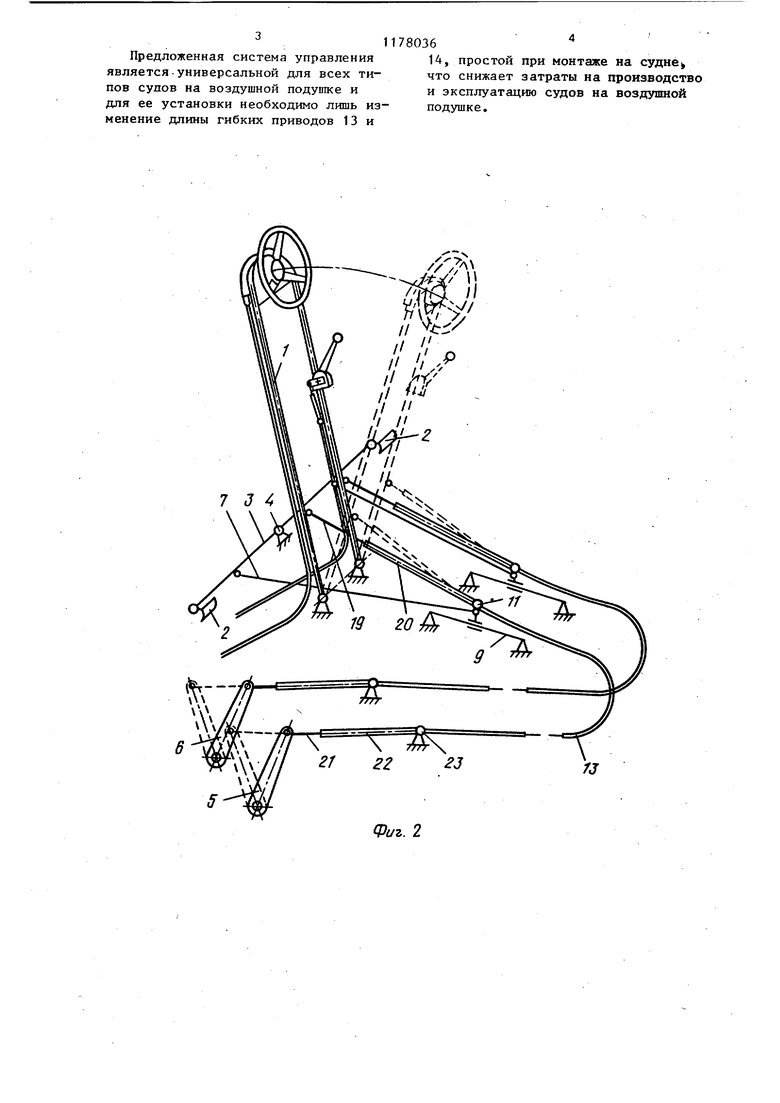
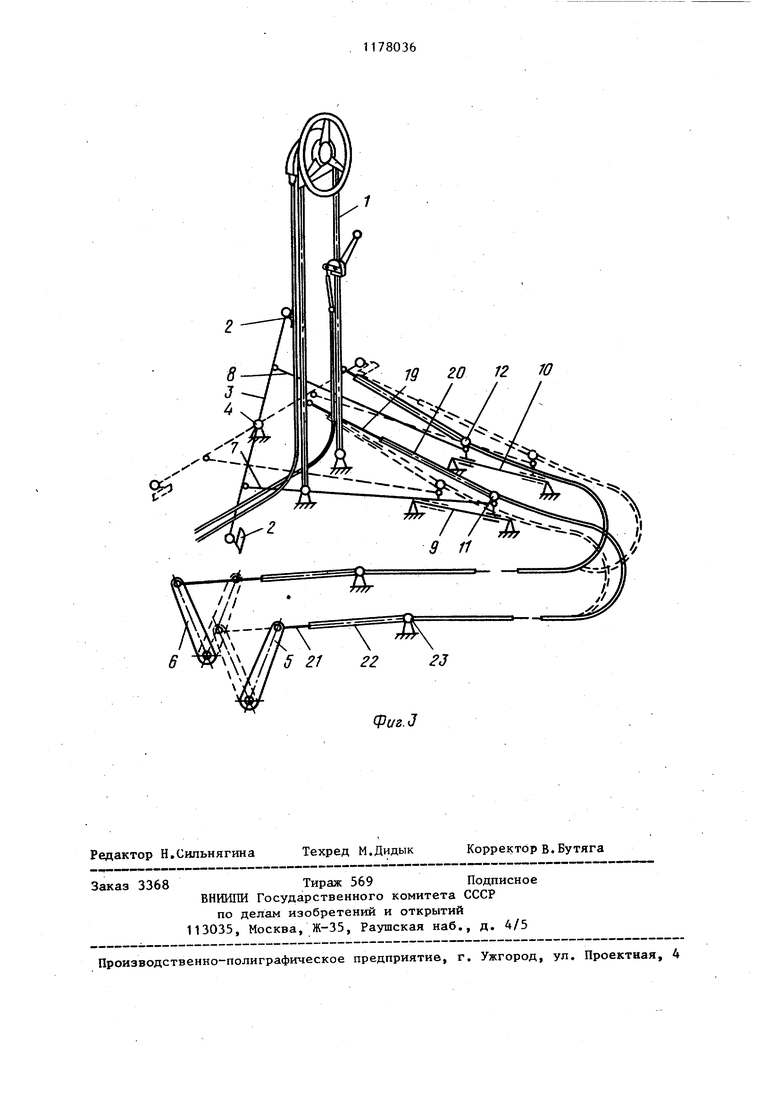
Предложенная система управления 14, простой при монтаже на судне является-универсальной для всех ти- что снижает затраты на производство пов супов на воздушной подуппсе и и эксплуатацию судов на воздушной для ее установки необходимо лишь из- подушке. менение длины гибких приводов 13 и
| название | год | авторы | номер документа |
|---|---|---|---|
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО НА ВОЗДУШНОЙ ПОДУШКЕ | 2023 |
|
RU2822072C1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА Е.С.ВАЖИНСКОГО | 2012 |
|
RU2490172C1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| Рулевое управление судна на воздушной подушке | 1983 |
|
SU1169287A1 |
| Многоосный летательный аппарат с вертикальным взлетом, посадкой и способ управления им | 2021 |
|
RU2768085C1 |
| АВТОЖИР, СПОСОБ ЕГО ПРЕОБРАЗОВАНИЯ В СТОЯНОЧНОЕ ПОЛОЖЕНИЕ И СПОСОБ РЕГУЛИРОВАНИЯ ЕГО ЦЕНТРОВКИ | 1992 |
|
RU2005657C1 |
| МЕХАНИЗМ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2011 |
|
RU2485017C2 |
| Гидросамолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями | 2021 |
|
RU2781817C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| ИМПУЛЬСНЫЙ ЛОКОМОТОР | 2015 |
|
RU2659666C1 |
СИСТЕМА УПРАВЛЕНИЯ СУДНА НА ВОЗДУШНОЙ ПОДУШКЕ, имеющего воз душные винты регулируемого шага, содержащая шарнирно установленную колонку, две педали, закрепленные на штанге, устсшовленной на оси в ее средней части, рычагк и механиз поворота лопастей винтов регулируе мого шага, имеющий тяги, причем ко лонки и педали взаимосвязаны между собой указанным приводом,, отличающаяся тем, что, с целью упрощения конструкции и уменьшения веса системы, она выполнена с двумя направляющими, каждая из которых снабжена подвижным шарниром, а механизм поворота лопастей винтов регулируемого шага выполнен с гибкими приводами с силовыми сердечниками возвратно-поступательного перемещения, каждый из которых одним своим концом соединен с одним из указанных рычагов, а другим - с подвияпьы шарниром, который, кроме того, связан с указанной штангой посредством одной из тяг привода поворота лопастей винтов регулируемого шага. }
AN
,//;
Л7
Фс/г. 2 2 W 20 12
fpuz.J Ю
| Гибкое лекало | 1928 |
|
SU11840A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
