Изобретение относится к строительству объектов нефтеперерабатывающей промышленности, а именно к устройствам для обработки внутренних поверхностей цилиндрических резервуаров для хранения нефтепродуктов, и может быть использовано в химической, пищевой, судостроительной промышленности и других отраслях народного хозяйства, где применяются резервуары больших объемов.
Целью изобретения является расширение эксплуатационных возможностей передвижных лесов для производства работ внутри резервуара.
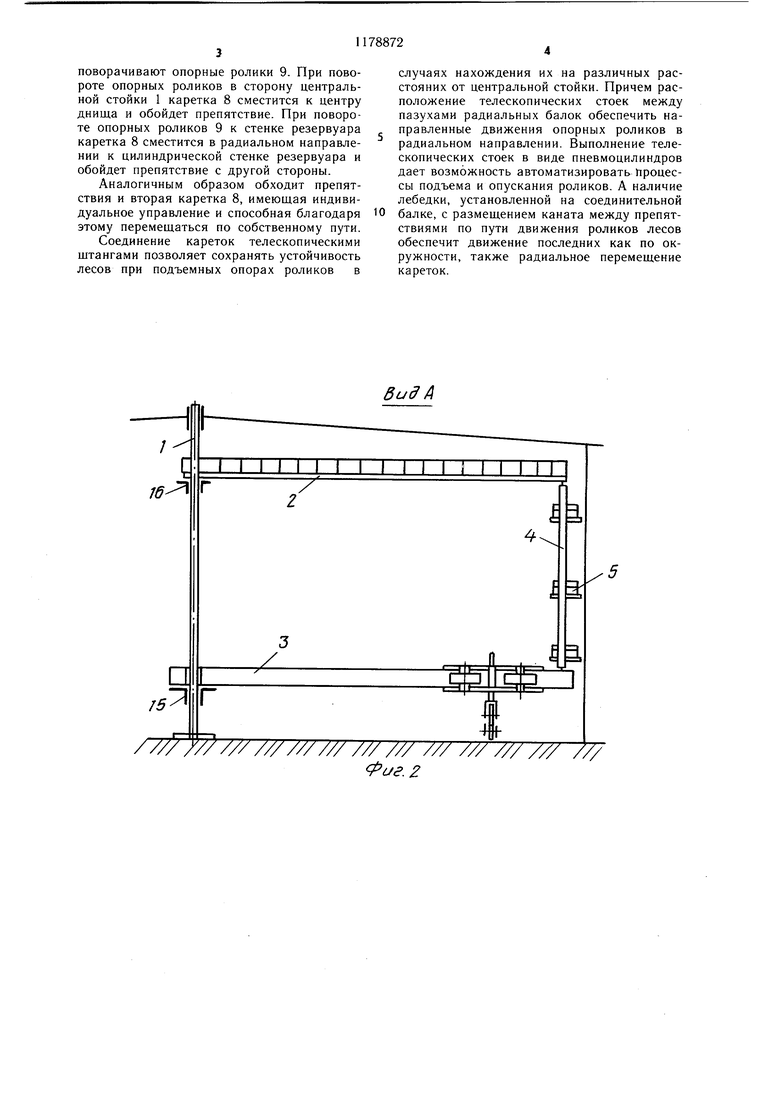
На фиг. 1 даны передвижные леса, обш,ий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - опорный ролик, сечение.
Передвижные леса содержат центральную стойку 1, опираюш.уюся на днище обрабатываемого резервуара и фиксируемую в центральном люке крышки резервуара, ферму-платформу 2 и радиальные балки 3, шарнирно соединенные с центральной стойкой, сходящиеся опоры 4 с рабочими площадками 5, соединенные в верхней части с фермой-платформой 2, а в нижней части опираются на радиальные балки 3. Радиальные балки имеют пазухи 6, опирающиеся на поддерживающие ролики 7, имеющие вертикальные оси вращения и установленные в каретке 8, способные перемещаться вдоль боковых стенок радиальных балок и по днищу резервуара благодаря наличию роликовых опор 9, установленных между поддерживающими роликами 7 и дополнительными роликами 10. Опорные 9 и дополнительные ролики 10 прикреплены к кареткам 8 при помощи телескопических стоек 11, имеющих центральные стержни 12, которые в верхней части имеют поворотные рычаги 13, позволяющие изменять положение опорных роликов 9 относительно радиального направления. Регулируемая по длине стяжка 14 шарнирно прикреплена к кареткам 8.
Ферма-платформа и горизонфальные балки в местах соединения с центральной стойкой опираются на упорные подшипники 15 и 16, установленные соответственно в верхней и нижней частях центральной стойки 1, расходящиеся концы горизонтальных балок связаны соединительной балкой 18.
Для передвижения вращения вокруг центральной стойки, на связующей балке 8 установлена лебедка 17 с приводом. Канат от лебедки свободным концом закреплен на неподвижный предмет, расположенный внутри резервуара или за его пределами.
В качестве привода лебедки 17 применен пневмодвигатель, управляемый пневморасраспределителем. Телескопические стойки могут быть заменены пневмоцилиндрами двойного действия с двухсторонними штоками, выполняющими функции центральных стержней 11.
Работа передвижных лесов осуществляется следующим образом.
В зависимости от наличия, расположения и конфигурации препятствий на днищах резервуаров участки пути передвижения подразделяются на: А - участки, не имеющие препятствий; Б - участки, имеющие трубопроводы, расположенные радиально относительно днища резервуара перпендикулярно направлению движения опорных и вспомогательных роликов; В - участки, имеющие углубления: колодцы, трапы и каналы на днищах резервуаров; Г - участки, имеющие трубопроводы, расположенные по концентрически относительно центра резервуара окружностям; Д - участки, имеющие стойки, кронщтейны, расположенные, в основном, в шахматном порядке и препятствующие передвижению роликов по непрерывной окружности.
Как правило, высота препятствий не превыщает высоты нижнего пояса цилиндрической части резервуара, т.е. высоты 1,3- 1,5 м, а их длина - величины 0,2-15 м. Передвижение лесов осуществляется на опорных роликах 9, дополнительные ролики
10 в это время находятся в поднятом положении, расстояние от поверхности днища до дополнительных роликов равно около 1,5- 1,0 метров.
Для приведения лесов в движение включают вращение лебедки 17. При этом канат,
закрепленный свободным концом за неподвижный предмет, заставляет подмости вращаться вокруг центральной стойки 1. Таким образом, происходит движение по участку А, не имеющему препятствий.
Преодоление участков пути Б и В осуществляется следующим образом. До препятствия подмостки движутся изложенным вЫще образом. Но как только дополнительные ролики 10 пройдут над препятствием, движение останавливают, дополнительные ролики 10 опускают в нижнее положение так, чтобы препятствие оказалось между дополнительными 10 и опорным 9 роликами, затем поднимают опорные ролики 9 в верхнее положение и продолжают движение. После прохождения второго опорного ролика
9 над препятствием движение останавливают, опорные ролики 9 опускают и поднимают в верхнее положение дополнительные ролики 10, и движение продолжается.
В способах преодоления препятствий А, Б и В автоматическое выполнение операций по подъему и опусканию опорных 9 и дополнительных 10 роликов, излагаемое ниже позволяет исключить остановки подмостей и осуществлять их плавное перемещение. Препятствия типа Г и Д преодолеваются
следующим образом.
Леса движутся на опорных роликах 9, дополнительные ролики 10 подняты в верхнее положение. При приближении к препятствию при помощи поворотного рычага 13
поворачивают опорные ролики 9. При повороте опорных роликов в сторону центральной стойки 1 каретка 8 сместится к центру днища и обойдет препятствие. При повороте опорных роликов 9 к стенке резервуара каретка 8 сместится в радиальном направлении к цилиндрической стенке резервуара и обойдет препятствие с другой стороны.
Аналогичным образом обходит препятствия и вторая каретка 8, имеющая индивидуальное управление и способная благодаря этому перемещаться по собственному пути.
Соединение кареток телескопическими штангами позволяет сохранять устойчивость лесов при подъемных опорах роликов в
случаях нахождения их на различных расстояних от центральной стойки. Причем расположение телескопических стоек между пазухами радиальных балок обеспечить направленные движения опорных роликов в радиальном направлении. Выполнение телескопических стоек в виде пневмоцилиндров дает возможность автоматизировать Процессы подъема и опускания роликов. А наличие лебедки, установленной на соединительной балке, с размещением каната между препятствиями по пути движения роликов лесов обеспечит движение последних как по окружности, также радиальное перемещение кареток.
| название | год | авторы | номер документа |
|---|---|---|---|
| Землеройная машина | 1988 |
|
SU1617101A1 |
| Устройство для перемещения горных пород в карьере | 1990 |
|
SU1751325A1 |
| Передвижные подмости | 1975 |
|
SU522315A1 |
| Способ сооружения монолитных перекрытий (варианты) и подвижное опорное устройство | 2017 |
|
RU2775265C2 |
| УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ ТОРЦОВ ПАЧКИ КРУГЛЫХ ЛЕСОМАТЕРИАЛОВ | 2011 |
|
RU2463238C1 |
| ПЕРЕГРУЗОЧНЫЙ МОСТ | 1965 |
|
SU175627A1 |
| Способ монтажа большепролетных покрытий толкающим усилием | 2021 |
|
RU2789028C1 |
| ПЕРЕДВИЖНОЙ РАЗГРУЗОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2414410C2 |
| Шаговый подъемник | 1990 |
|
SU1740313A1 |
| Опорно-ходовое устройство для передвижных лесов | 1977 |
|
SU883293A1 |

1. ПЕРЕДВИЖНЫЕ ЛЕСА ДЛЯ ПРОИЗВОДСТВА РАБОТ ВНУТРИ РЕЗЕРВУАРОВ, содержащие центральную стойку, ферму-платформу и радиальные балки, шарнирно соединенные с центральной стойкой, сходящие опоры с рабочими площадками, соединенные В верхней части с фермой-платфор мой, а в нижней части опирающиеся на радиальные балки, и роликовые опоры, взаимодействующие с радиальными балками, объединенными соединительной балкой, от личающиеся тем, что, с целью расщирения эксплуатационных возможностей, радиальные балки снабжены каретками с направляющими роликами, взаимодействующими с боковыми стенками радиальных балок, при этом каретки соединены регулируемой по длине стяжкой, роликовые опоры расположены в каретках и перемещаются в пазухах выполненных на концах балок, а соединительная балка снабжена лебедкой, обеспечивающей горизонтальное перемещение лесов по днищу резервуара. 2. Передвижные леса по п. 1, отличаюI щиеся тем, что телескопические стойки выполнены в виде пневмоцилиндров с двухсл сторонним выходом, нижние концы которых соединены с роликами, а верхние - с поворотными рычагами. 00 00 1с
X
/
d
/5 / /// /// /// ///////// /// /// /// Фиг.2 /// /// /// ///
| Авторское свидетельство СССР № 227571, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СПОСОБ ПОЛУЧЕНИЯ ГРАНУЛИРОВАННЫХ СИНТЕТИЧЕСКИХ ЦЕОЛИТОВ | 2005 |
|
RU2283279C1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
