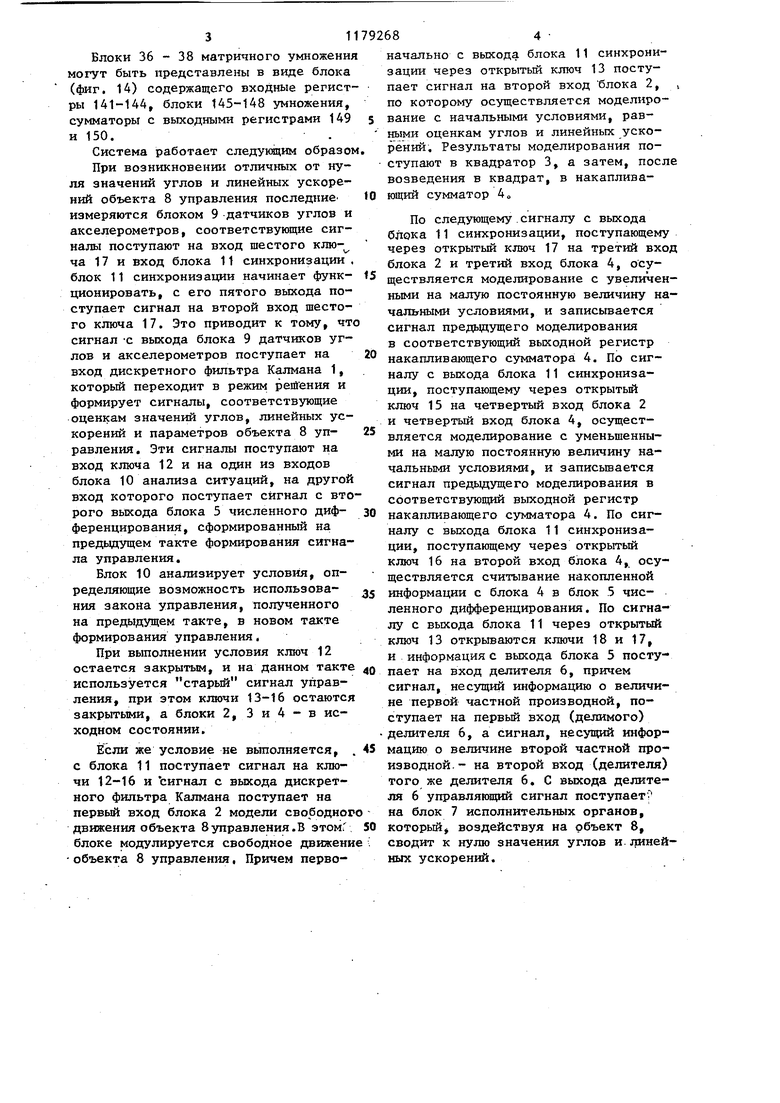
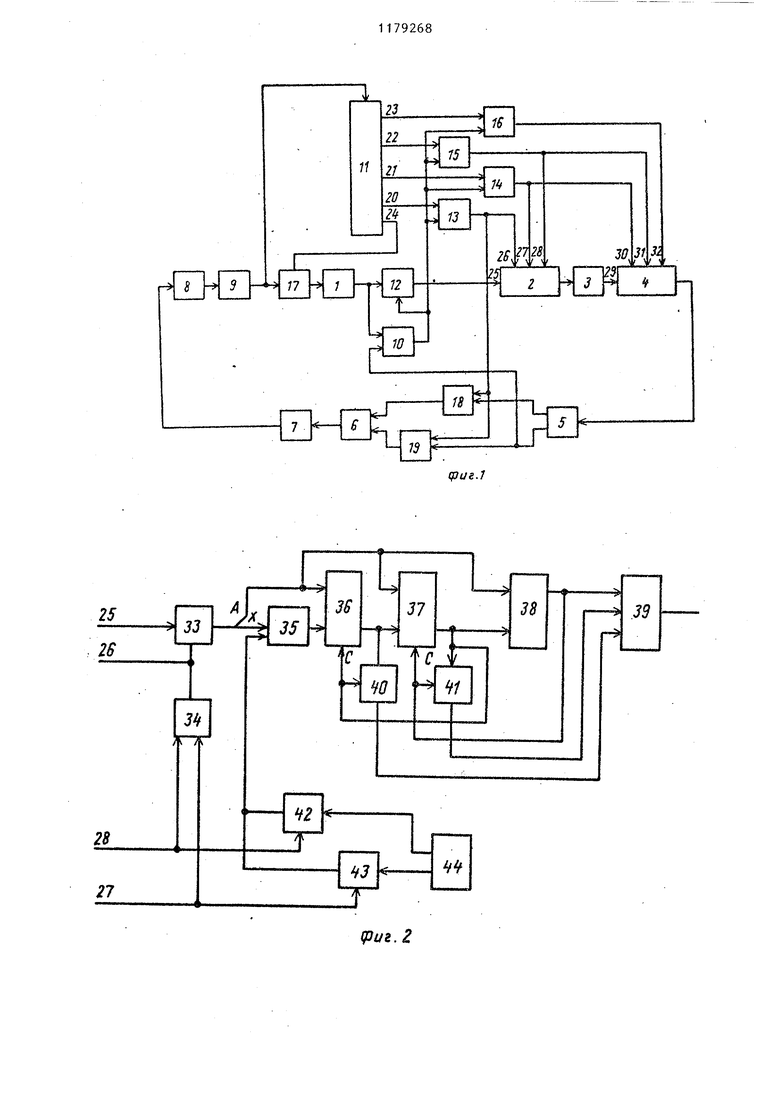
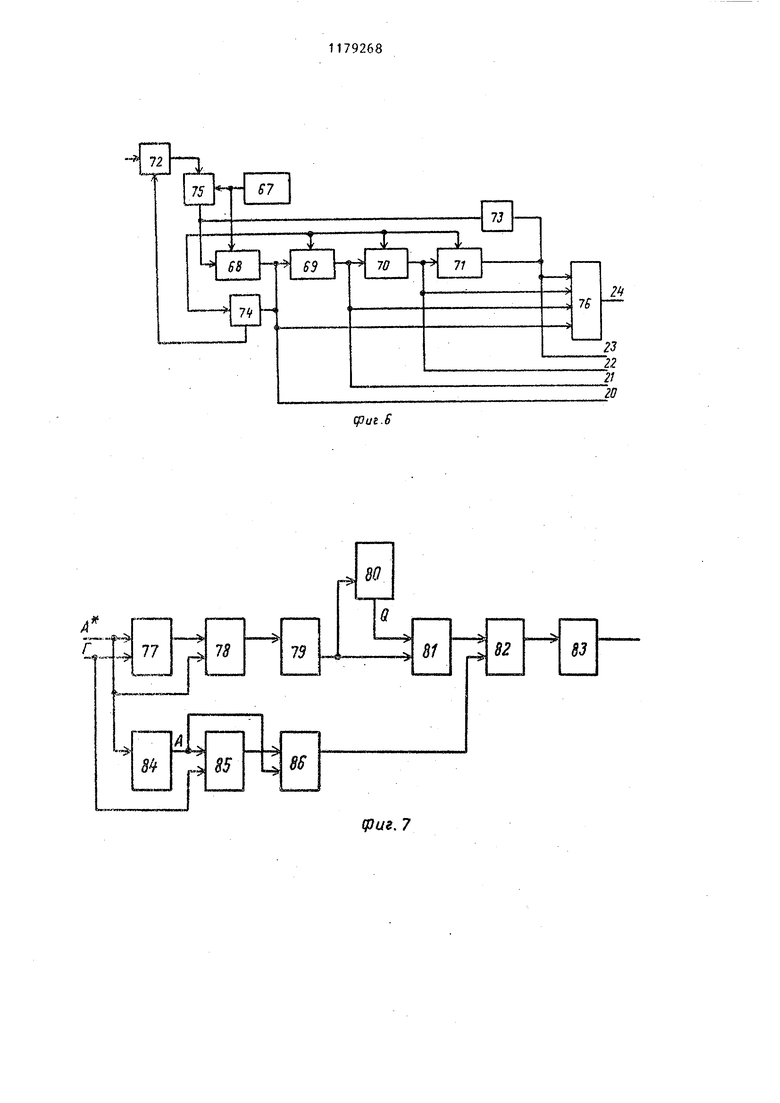
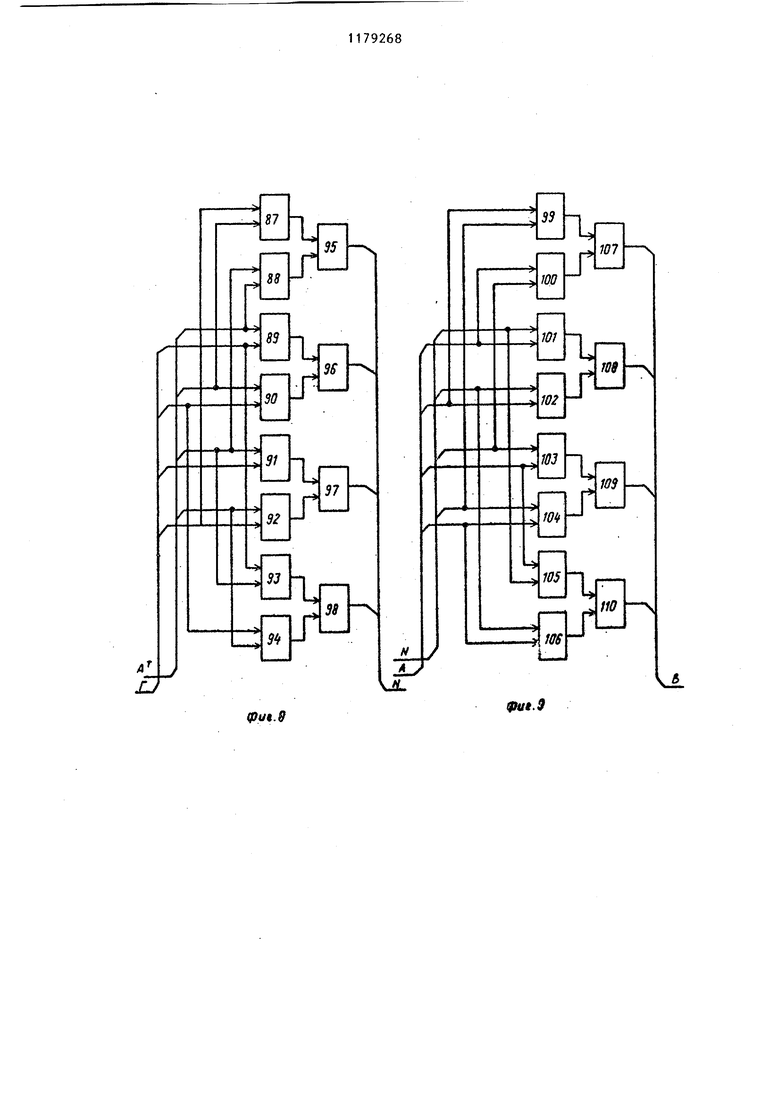
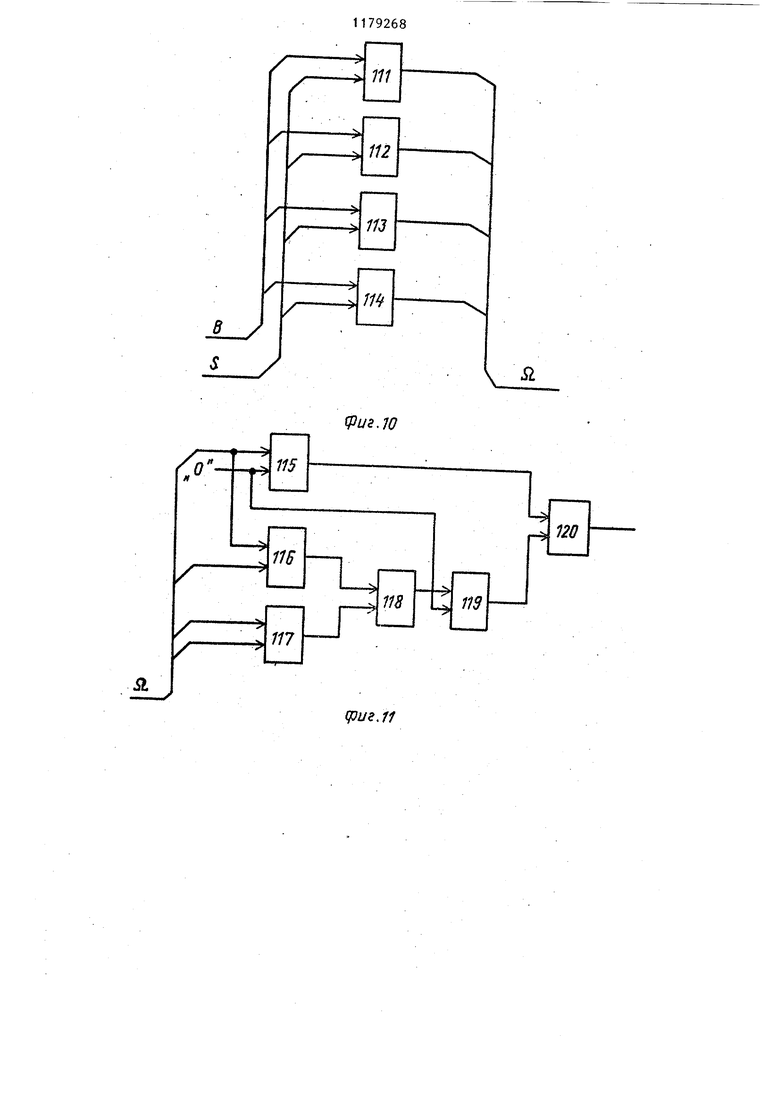
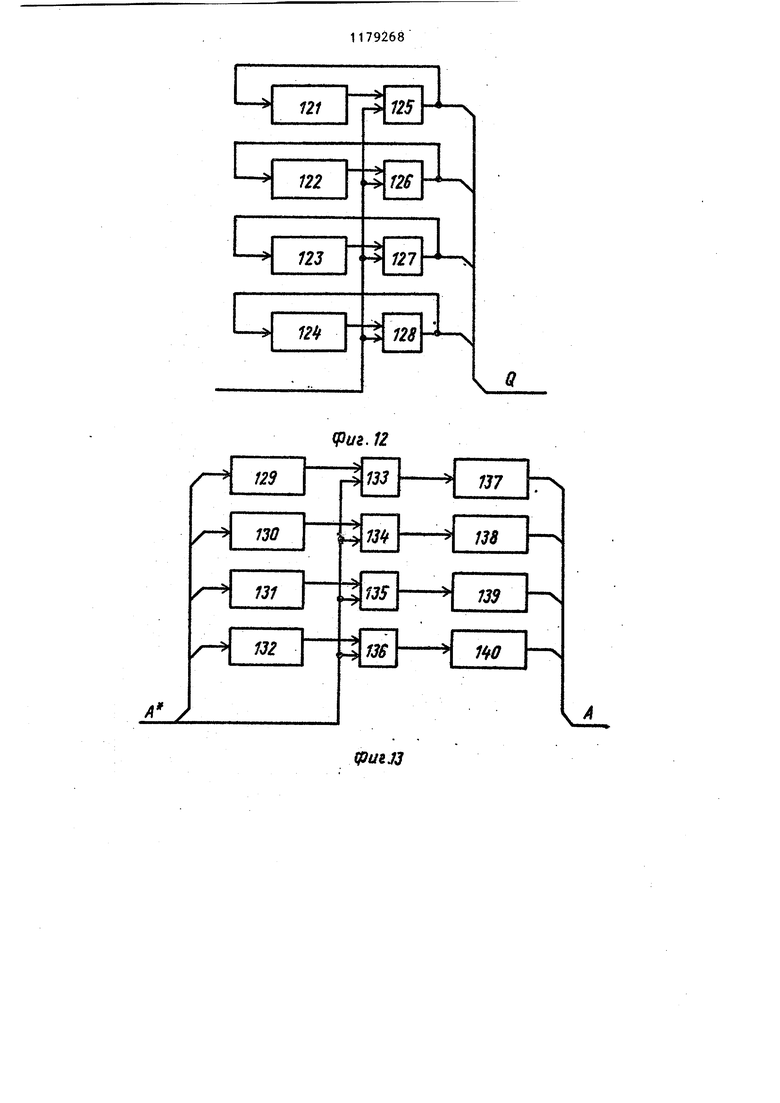
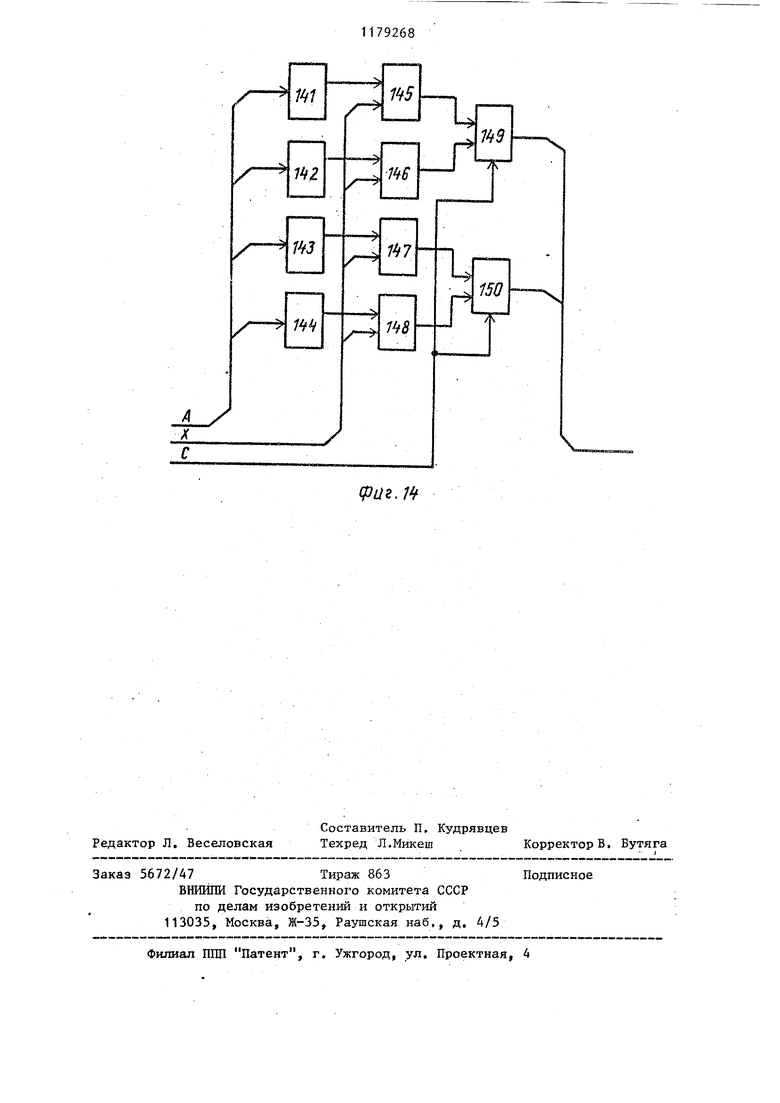
Изобретение относится к автоматике и может быть использовано .при управлении динамическими объектами, Целью изобретения является повышение быстродействия и надежности системы. На фиг, 1 представлена блок-схема адаптивной системы управления| на фиг; 2 - блок модели свободного движения объекта управления; на фиг.З накапливающий сумматор} на фиг.4 блок численного дифференцирования; на фиг. 5 дискретный фильтр Калмана; на фиг, 6 - блок синхронизации; па фиг, 7 - блок анализа ситуаций; на (})иг. 8 - блок матричного умножения А -Tj на фиг. 9 блок матричного умножения N-А; на фиг, 10 - блок мггтричного сложения; на фиг, 11 - блок сравнения; на фиг, 12 - регистр с регенерацией мад-ричной информации; .на фиг. 13 - регистр со сдвигом матричной информации; на фиг, 14 - блок матричного умножения АХ. Блок-схема адаптивной системы управления содержит дискретный фильт Калмана 1, блок 2 модели свободного движения,, квадратор 3, накапливающий сумматор 4, блок 5 численного дифференцирования, делитель 6, блок 7 исполнительных органов, объект 8 управления, блок 9 датчиков углов и акселерометров, блок 10 анализа ситуаций, блок 11 синхронизации и первьй восьмой ключи 12 - 19, входы выходы 20-32. Блок 2 модели свободного движения (фиг. 2), содержит ключ 33, логический блок ИЛИ 34, сумматор 35, блоки 36 - 38 матричного умножения (фиг. 14), логический блок ИЛИ 39, ктаочн 40 - 43, блок 44 источника постоянного напряжения. Накапливающий сумматор (фиг, 3) содержит блок 45 суммирования с накоплением, регистры 46 - 48, ключи 49 - 51. I Блок 8 численного дифференцирования (фиг. 4) содержит сумматоры 52 и 53, блок 54 умножения на два, инвертор 55, блок 56 умножения на Постоянное число, сумматор 57. Дискретный фильтр 1 Калмана (фиг. 5) содержит блок 58 расчета (|U- -1/|w), блок 59 расчета ; N( |ij + 1 / /u ), блок 60 расчета X .,, , блок 61 умножения, линию 62 задержки блок 63 расчета Р((1/+ I/P) блок 64 расчета P(U + , блок 65 умножения, регистр 66 с перезаписью информации.. Дискретный фильтр Калмана в своей расширенной интерпретации реализован в виде известного устройства. Блок 12 синхронизации (фиг. 6) содержит блок 67 постоянного напряжения, ждущие блокинг-генераторы 68-71, блок 72 блокировки, диодную цепь 73, ключи 74 и 75, логический элемент ИЛИ 76. Блок 11 анализа ситуаций (фиг. 7) содержит блоки 77 и 78 матричного умножения, инвертор 79, регистр 80, (фиг, 12), блоки 81 и 82 суммирования, блок 83 сравнения, регистр 84, блоки 85 и 86 матричного умножения. Блоки 77 и 85 матричного умножения могут быть представлены в виде блока (фиг. 8), содержащего блоки 87-94 умножения, блоки 95-98 суммирования, в которых хранится результат матричного умножения. Блоки 78 и 86 матричного умножения могут быть представлены в виде блока (фиг. 9), содержащего блоки 99-106 умножения, блоки 107-110 суммирования, в которых хранится результат матричного умножения. На фиг, 10 представлена блок-схе-г ма суммирования, состоящая из сумматоров 111-114, Результа.ты суммирования матриц В и S хранятся в этих сумматорах, На фиг, 11 представлена схема блока 83 сравнения для определения положительной определенности матрицы 52, Блок 83 сравнения содержит блоки 116 и 117 умножения, компараторы 115, 119, на выходе которых появляется сигнал при положительном значении анализируемого сигнала, блок 118 вычитания, логическую схему 120 И с инверсным выходом, В регистре 80 с регенерацией содержимого (фиг. 12) происходит считывание информации по сигналу с блока 79 с одновременной ее перезатшсью, l5noK 80 содержит регистры 121-124, ключи 125-128, В регистре 84 (фиг, 13) происходит хранение сигналов, соответствуЛошцях элементам матрицы А с последнего такта формирования управляющего воздействия. Блок 84 содержит регистры 129-132 и 137-140 и ключи 133-136, Блоки 36 - 38 матричного умножени могут быть представлены в виде блока (фиг, 14) содержащего входные регист ры 141-144, блоки 145-148 умножения, сумматоры с выходными регистрами 149 и 150.. Система работает следукнцим образо При возникновении отличных от нуля значений углов и линейных ускорений объекта 8 управления последние измеряются блоком 9 датчиков углов и акселерометров, соответствующие сигналы поступают на вход шестого ключа 17 и вход блока 11 синхронизации блок 11 синхронизации начинает функционировать, с его пятого выхода поступает сигнал на второй вход шестого ключа 17. Это приводит к тому, чт сигнал С выхода блока 9 датчиков углов и акселерометров поступает на вход дискретного фильтра Калмана 1, который переходит в режим реШения и формирует сигналы, соответствующие оценкам значений углов, линейных ускорений и параметров объекта 8 управления. Эти сигналы поступают на вход ключа 12 и на один из входов блока 10 анализа ситуаций, на другой вход которого поступает сигнал с вто рого выхода блока 5 численного дифференцирования, сформированный на предыдущем такте формирования сигнала управления. Блок 10 анализирует условия, определяющие возможность использования закойа управления, полученного на предыдущем такте, в новом такте формирования управления. При выполнении условия ключ 12 остается закрытым, и на данном такте используется старый сигнал управления, при этом ключи 13-16 остаются закрытыми, а блоки 2, 3 и 4 - в исходном состоянии. Если же условие не вьтолняется, . с блока 11 поступает сигнал на ключи 12-16 и сигнал с выхода дискретного фильтра Калмана поступает на первый вход блока 2 модели свободног движения объекта В управления.В этомГ блоке модулируется свободное движени - объекта 8 управления, Причем первоначально с выхода блока 11 синхронизации через открытый ключ 13 поступает сигнал на второй вход блока 2, по которому осуществляется моделирование с начальными условиями, равными оценкам углов и линейных ускорений. Результаты моделирования поа затем, после в накапливавозведения в квадрат, ющий сумматор 4„ По следующему.сигналу с выхода блока 11 синхронизации, поступающему через открытый ключ 17 на третий вход блока 2 и третий вход блока 4, осуществляется моделирование с увеличенными на малую постоянную величину начальными условиями, и записывается сигнал предыдущего моделирования в соответствующий выходной регистр накапливающего сумматора 4. По сигналу с выхода блока 11 синхронизации, поступающему через открытьй ключ 15 на четвертый вход блока 2 и четвертый вход блока 4, осуществляется моделирование с уменьшенными на малую постоянную величину начальными условиями, и записьшается сигнал предыдущего моделирования в соответствующий выходной регистр накапливающего сумматора 4. По сигналу с выхода блока 11 синхронизации, поступающему через открытый ключ 16 на второй вход блока 4, осуществляется считывание накопленной информации с блока 4 в блок 5 численного дифференцирования. По сигналу с выхода блока 11 через открытый ключ 13 открываются ключи 18 и 17, и информация с выхода блока 5 поступает на вход делителя 6, причем сигнал, несущий информацию о величине первой частной производной, поступает на первый вход (делимого) делителя 6, а сигнал, несущий информацию о величине второй частной производной.- на второй вход (делителя) того же делителя 6. С выхода делителя 6 управлякщий сигнал поступаетна блок 7 исполнительных органов, который, воздействуя на объект 8, сводит к нулю значения углов и.линейных ускорений.
(риг.
(риг.5
J 1
24
7S
23 22 1/
20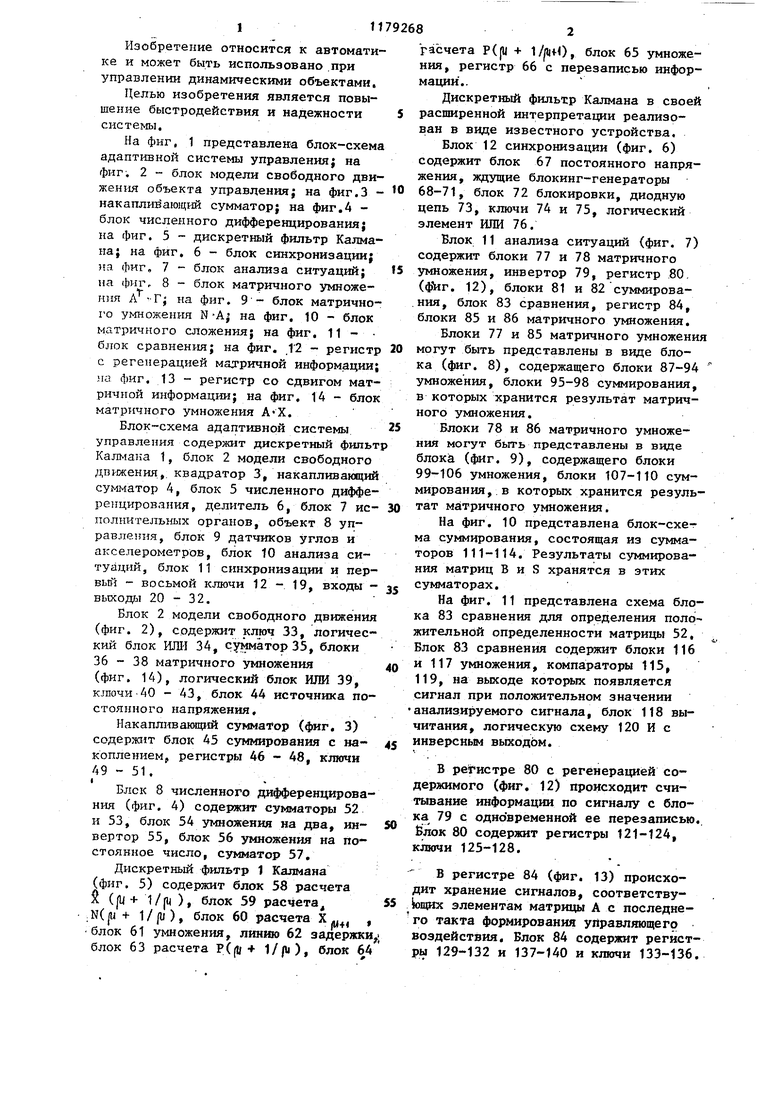
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| Адаптивная система управления | 1987 |
|
SU1464139A1 |
| Адаптивная система управления | 1988 |
|
SU1575152A1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| Генератор синусоидальных сигналов качающейся частоты | 1985 |
|
SU1279077A1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| Устройство для цифровой фильтрации | 1983 |
|
SU1109889A1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
| Устройство для деления | 1988 |
|
SU1517026A1 |
| Устройство для контроля дискретного объекта | 1984 |
|
SU1218398A1 |
АДАПТИВНАЯ СИСТЕМА УЛРАВЛЕ-, БИЯ, содержащая дискретный фильтр Калмана, последовательно соединенные блок модели свободного движения объекта управления, квадратор, накапливающий сумматор, блок численного дифференцирования, а также последовательно соединенные делитель и блок исполнительных органов, выходом соединенный с входом объекта управления, выход которого подключен к входу блока датчиков углов и акселерометров, отличающаяся тем, что, с целью повьшения быстродействия и надежности системы, в нее введены блок анализа ситуации, блок синхронизации, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой ключи, при этом первый вход блока анализа ситуации соединен с выходом дискретного фильтра Калмана, а второй вход - с первым выходом блока численного дифференцирова:ния, выход блока анализа ситуаций соединен с первыми входами первого. второго, третьего, четвертого и пятого ключей, выход блока датчиков углов и акселерометров соединен с входом блока синхронизации, первый выход которого соединен с вторым входом второго ключа, второй, третий, четвертый выходы блока синхронизации соединены с вторыми входами третьего, четвертого и пятого ключей соответственно, выход блока датчиков УГЛОВ и акселерометров соединен с первым входом, а пятый выход блока синхронизации соединен с вторым входом шестого ключа, выход которого соединен с входом дискретного фильтра Калмана, второй вход первого клю(Л ча соединен с выходом дискретного С фильтра Калмана, а выход - с входом модели свободногодвижения объекта .управления, выход пятого ключа соединен с вторым входом накапливающего сумматора, выходы второго, треть-, его и четвертого ключей соединены с входами модели свободного двкже;ния объекта управления соответствен но-, третий вход накапливающего сумматора соединен с выходом третьего ключа, а четвертый вход - с выходом четвертого ключа, выход второго ключа соединен с первыми входами седьмого и ВОСЬМОГО ключей, второй выход ij блока численного дифференцирования соединен с входом седьмого ключа, а первый выход этого блока соединен с вторым входом восьмого ключа, выход седьмого ключа соединенс первым входом, а выход восьмого ключа - с вторьо входом блока деления.
f4
7
77
(риг, 7
(put.9
ut.9
сриг.71
Фг/г. 12
(ptizjfy
| Кутько П.Д | |||
| Вариационные методы синтеза систем с цифровыми регуляторами | |||
| М.: Советское радио, 1967, с | |||
| Стрелочный контрольный замок | 1924 |
|
SU421A1 |
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Авторское свидетельство СССР № 923293, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Саридис Дж.Самоорганизующиеся стахостатическйе системы управления | |||
| М.: Наука, 1980, с | |||
| Приспособление для удаления таянием снега с железнодорожных путей | 1920 |
|
SU176A1 |
