Изобретение относится к автоматике и может быть использовано при управлении динамическими объектами.
Цель изобретения - расширение области применения за счет увеличения числа управляющих сигналов и повышения точности их формирования для соответствующих исполнительных органов.
На чертеже представлена блок-схема адаптивной системы управления.
Адаптивная система управления содержит (фиг. 1) объект 1 управления, блок 2 датчиков угла и акселерометров, дискретный фильтр Калмана
3., блок 4 синхронизации, блок 5 адаптации коэффициентов функционала, блок 6 анализа ситуаций, блок 7 экстраполяции, блок 8 датчиков положения
исполнительных органов, блок. 9 исполнительных органов, переключатели 10-18, блоки 19 адаптивного формирования управляющего сигнала.
Блоки 19 адаптивного формирования управляющего сигнала содержат (фиг.1) блоки 20 модели свободного движения объекта управления, квадраторы 21, блоки 22 вычисления функции Ляпунова Беллмана, блоки 23 численного диффесл
СЛ
ел
ГС
3 15751524
ренцирования, переключатели 2Л и 25,- , ,
,. е. Я 1 соответственно моблок 26 деления.Ге
в - -менты начала и конВ основу устройства адаптивной ,
ца интервала оптисистемы управления положены следую-„ „„ .
ч мизации.
щие соотношения. Динамика объекта .Оптимальное управление 0 должно
управления и его исполнительных орга-минимизировать функционал (2) на ре... .а....Н :шениях (О, если существует положи-
тельно определенная функция V(p,x,,,
стационарными разностными уравнениямиt г, i
«о Уи удовлетворяющая следующим усло Н;
ВИЯМ
XM+1 ВИ V(1)

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1987 |
|
SU1464139A1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| Самонастраивающаяся система управления | 1984 |
|
SU1171755A1 |
| Робастный дискретный стохастический фильтр | 2023 |
|
RU2804256C1 |
| Система автоматического управления | 1984 |
|
SU1168897A1 |
| Устройство для стабилизации объекта упругой конструкции | 1988 |
|
SU1532897A1 |
| НЕЛИНЕЙНАЯ АДАПТИВНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2004 |
|
RU2267147C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| Адаптивная система управления | 1984 |
|
SU1179268A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
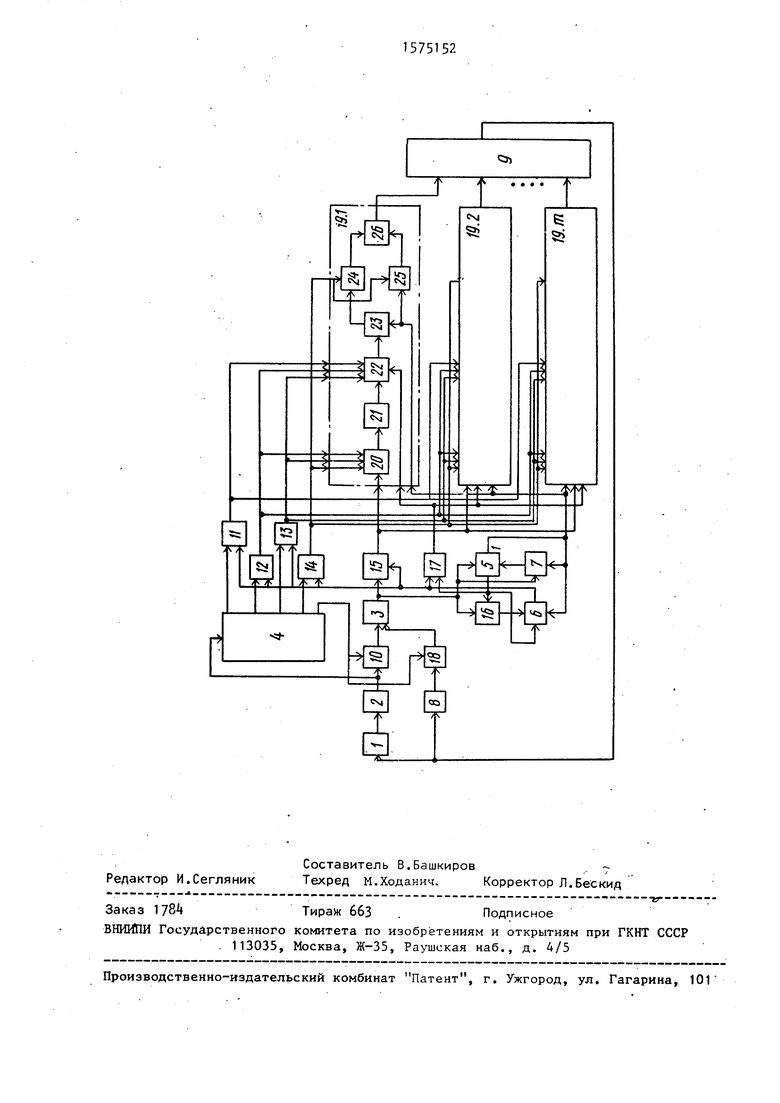
Изобретение относится к автоматике и может быть использовано при управлении динамическими объектами. Цель изобретения - расширение области применения за счет увеличения числа управляющих сигналов и повышения точности их формирования для соответствующих исполнительных органов. Адаптивная система управления содержит объект 1 управления, блок 2 датчиков угла и акселерометров, дискретный фильтр Калмана 3, блок 4 синхронизации, блок 5 адаптации коэффициентов функционала, блок 6 анализа ситуаций, блок 7 экстраполяции, блок 8 датчиков положения исполнительных органов, блок 9 исполнительных органов, переключатели 10-18, блоки 19 адаптивного формирования управляющего сигнала. Цель изобретения достигается за счет введения блока 8 датчиков положения исполнительных органов, переключателя 18 и блоков 19 адаптивного формирования управляющего сигнала, колличество которых меньше числа исполнительных органов. 1 ил.
Ьу. УИ + СЛ {V(1)SXM4,, ум„) - V(M,VyH) +
где х - n - мерный вектор состояния, 5г т Тт n fxix 1 + ттт р п +
Мобъекта управления),+lxp J Мур
у - г - мерный вектор положения
исполнительных органов;+ V () II /; /7 )
v Г I - М ЬГ
Uf/ - m - мерный вектор управленияг
А. - соответственно матрицы 20g .
состояния объекта, эф--г0-|V((p+l) ,,y ./.1) фективности управленияК
и положения .исполнитель-- v(u x v ) +Гхг vTl О +
ных органов.. + LXM у
Качество системы оценивается с25
помощью дискретного аналога критерия, т,т R TI ../чМ п /л
обобщенной работы ГТ Х( V)| (7 И
Предположим, что для любой точки
I xj yt 1 , уЈ и некоторой ее окрестноеL у р
{-iти известно значение оптимальной
+ хт утЛ QM XH +функции Ляпунова-Беллмана V(p,x ,yw),
F-Mo1- и м ЧУ(и видаr r
+ UTRMUM + +
д.лск.,, 35 ..
„w ir il ( Этой точке соответствует некото- У u+i I
г.4g,oe значение оптимального управления
Предположим, что в начале каждогде Ge, Q у - положительно полуопре-гЈ такта работы производится опредеделенные матрицы;леиие вектора состояния и задание
R - положительно определен-начальных условий в модель свободноная матрицаJ -го движения ОУ V - функция Ляпунова-Белл45
45
мана{Г хм 1 Г А// в
Ц
d - дифференциал, соответ- Д
ствуюций приращению У/лн L° E J
№
х«
У
/и
KJ
(6)
скалярной функ- обеспечивая в начале каждого такта
ции V векторного аргу-50 равенство мента ,м г 1 1 1 sИ И У У
+ L e-JT T TTd v(h+ D/,x
r г г Szii- / b:jВ силу уравнения (1) заданной точ+ 1, xjL, yjJ«)-V(p р. К6 х И тствует некоторая
точка х l,fi У r(+1 J, лля которой су- «/( ли ,у ) - оценка сигналов уп-
Р Н И равления-,ществует функция
го движения ОУ
5
Г хм 1 Г А// в
Ц
Д
У/лн L° E J
х«
У
/и
KJ
(6)
V((p+1), хм + 1, уг,)
w
Разложим функцию V(jU+1) ,x „ft ,y +t) в ряд Тейлора относительно вектора
( fxn)1 (У (Uti)T 3 и с Учето-м (7) получим
V((K+1),xM+f,yjM,,) V((p+1),
ХМ v +ПтГт 3VKf+D.,) + х f/s- +
°У /u+i
+ 1 пт rr 3tv((.yЈi)
+ 2 ии ср м 4Г
(Эун„)
15
CpV
(9)
Подставив (9) в (0 и выполнив векторное дифференцирование по и„, получим оптимальное дискретное управление в виде
tl, -r2Ru+C V(fX+1)) г L К F хл /и х 2 (3yp4i)
.с 1ст зу((Н+1,хЈ,,у%.и)n
°MJCMаТй u
аум
} и«
Учитывая, что
-М .. М
У((ц+1),,у«„) - ,Vy/J).
-t))T Q,yKp (n
получим, что управление (10) оптимизирует функционал (2) на решениях (1) и удовлетворяет (3), W. Выражение (11) с учетом (7) можно записать в виде
v((K+i,xpM,yp - vcK. - - (12)
г г Ly и J
Суммируя обе части (12) по р( от р0 до (1-1) и учитывая равенство
ЭУ((н+1),, Ум.) -, У((м + О.х. + ) y((H + 1).,yЈt,) (15)
Зум (х +
t II D,
157515 vCCH + 0..,,yf,,) н-f-,
-t у , ,;
получим
)
++
)
)
)
10
«H,.«J.J -t J G«i:l +
t
f-1
. м
,
+ t (x)T(y;) (i3)
- Г J
Так как в качестве начального может быть выбрано любое из рс(1-О , то из (13) следует
V((p+1),xJXt,yЈ, )
20 +
- Г (хГ)Т(У) (1) f
25 Таким образом, при работе системы для определения оптимального дискретного управления на каждом и-ом такте необходимо последовательно решить уравнения модели свободного движения ОУ при начальных условиях (7), вычислить функцию V((p + 1),x ,
у ) согласно (14), путем численного дифференцирования определить первую и вторую частные про- 35 изводные функции V((f + 1), ,
Ј- ВеКТ°РУ С(хрТ(нП вычислить U., по формуле (Ю)„ Синтезированные таким образом управления 40 воздействуют на исполнительные органы объекта в течение и-го такта. На ((«+1)-ом такте оценивается вектор
состояния . и цикл вычисле45 ний повторяется. Численное дифференцирование функции V((p+1),x ,у )
м по вектору у ,,+1 может быть произве- дено с использованием формул разност- 50 ной аппроксимации частных производных с учетом левой и правой разностей :
+
t II D,
/и
м
У V ( ( HjJ XjtMiyjiii
У((И + 1), ) 2У((и+1),х,1 ,уЈ.,) + У((м+1) , ) (16)
(ЛИ),/H
- малая величина; О
,- норма матрицы D ,, LH. м
V((p + 1),xЈf, ,) - функции, вычисленные на основе ( при начальном условии (хр+1 ,уД );
х
м
V(p + 1),xJ+1fyЈ, + rfDM) и VO(fH-l), Ј+1 У ЛУ-I Dp) Функции, вычислен- 2п
У((М+1),хр+, ,у.+, +оГР) - У((и + 1,хЈ ,У%)
Подставив (15) и (16) в (10) определим оптимальное дискретное управление в виде:
Р V((fx + 1 ),Ј,,у Ј, + o/DM) -2V((, ,у Јf) + V((H + 1), ,у Ј, -JI)
где К -;
Следовательно, при реализции управления (17) вычисленные значения частных производных необходимо подать на блок деления.
Для динамических объектов коэффициенты матрицы качества долж ну изменяться в соответствии с изменением динамических характеристик объекта. Реализация этого подхода осуществлена следующим образом. На основании (11) с.учетом (5),. (8) выражение матрицы качества определяется выражением
ГР:
в
°1г Г АИ VI
Е JV 0Г ЕГ
(18)
Матрицу функции Ляпунова - Беллмана можно определить из выражения
г 7 эгУ((м+1) (19)
. ., -, Ч
(3
м
Х (Л+f
м
.У .
)
которое следует из (10) при учете (8). Выражения (18), (19) положены в основу определения матрицы качества Qr, расширенного объекта управления в процессе работы системы.
ные на основе (14) при начальных условиях (xЈt,yy,, WDp) и (хЈ, ,
у jut, -ofDp) соответственно.
Таким образом, для вычисления частных производных- необходимо трижды решить уравнения модели свободного движения расширенного объекта управления на интервале оптимизации п.ри различных начальных условиях,,
Подставив (15) и (16) в (10) определим оптимальное дискретное управление в виде:
0
5
0
Адаптивная система управления работает следующим образом.
Ненулевые углы поворота, линейные ускорения и положения исполнительных органов (МО) измеряются блоком 2 датчиков угла и акселерометров и блоком 8 датчиков положения исполнительных органов, сигналы с выхода . которых поступают соответственно на информационный вход первого переключателя 10, вход запуска блока k синхронизации и на информационный вход переключателя 18. Блок k синхронизации начинает функционировать, с его пятого выхода поступает сигнал на управляющие входы переключателей 10, 18. открывает их. Сигналы с выходов блока 2 и блока 8 поступают че 5 рез переключатели 10 и 18 на вход дискретного фильтра Калмана 3, который переходит в режим решения и на своем выходе формирует сигналы - оценки параметров и состояний расширенного объекта управления. Эти сигналы поступают на информационные входы переключателей 15, 16, третий вход блока 5 адаптации коэффициентов функционала и второй вход блока 7 экстраполяции, на первый вход которого поступают сигналы коэффициентов матрицы Гц функции Ляпунова-Беллма- на для предыдущего такта формирования сигнала управления со вторых
0
5
выходов блоков 23 численного диффе- р.енцирования блоков 19 адаптивного формирования управляющего сигнала.
В блоке 7 экстраполяции формируюся сигналы экстраполированных зна- чений и коэффициентов матрицы функции Ляпунова-Беллмана. Эти сигналы с выхода блока 7 экстраполяции поступают на второй вход блока 5 адаптации коэффициентов функционала реализующего вычисление коэффициентов матрицы качества по выражению (18). Сигналы с выхода блока 5 поступают на управляющий вход переключателя 16 информационный вход переключателя 17 и вход управления по коэффициентам функционала блока 6 анализа ситуаций. Блок 6 формирует сигналы коэффициентов матрицы
аи QM + (
АиВр О Е
ЫХ
хГгЛАиМJ Н° Е J
и определяет условия ее -положительной определенности, в которых заключается возможность использования управления, полученного на предыдущем такте формирования, в новом ее такте. В случае положительной определенности матрицы Я. на выходе блока 6 формируется нулевой сигнал, разрешающий использование управления, полученного на предыдущем такте, а в противоположном случае формируется единичный сигнал запрета. В случае нулевого сигнала на выходе блока 6 переключатели 10, 11, 12. 13, 14, 17 разомкнуты, а блоки 20-22 находятся в исходном состоянии. В случае единичного сигнала на выходе блока 6 переключатели 10, 11, 12, 13, 14,17 замыкаются. При этом сигналы с выхо- да блока 5 адаптации коэффициентов функционала поступают через ключ 17 на входы управления перестройкой по коэффициентам функционала качества блоков 22 вычисления функции Ляпуно- ва-Беллмана. Одновременно сигналы оценок состояний расширенного объект управления с выхода дискретного фильтра Калмана 3 через переключатель 15 поступают на информационные входы блоков 20 модели свободного движения объекта управления, а с четвертого выхода блока 4 синхрони751521°
зации через переключатель 14 поступает сигнал на входы запуска решения с номинальными начальными условиями блоков 20 модели свободного движения объекта управления, в которых производится определение вектора состояния расширенной модели при номинальных начальных условиях. Затем по сиг
JQ налу с третьего выхода блока 4 синхронизации через переключатель 13 поступает сигнал на входы запуска решения с увеличенными начальными условиями блоков 20, в которых про15 изводится решение с начальными условиями (HUH + 4Ъи). И наконец,
по сигналу со второго выхода блока k синхронизации через переключатель 12 20 поступает сигнал на входы запуска решения с уменьшенными начальными условиями блоков 20, в которых производится определение вектора состояния при начальных условиях (х и ,
74 М
у - VD ). Сигналы с выходов блоков
20полученные в результате трех решений через соответствующие квадраторы
21поступают на информационные вхо- 30 ды блоков 22, обеспечивающих в каждом
соответственно вычисление трех значений функции Ляпунова-Беллмана
35
),vf,y;r«
5
На трех решениях уравнения модели ., свободного движения с начальными условиями, равными оценкам углов, линейных ускорений и положений исполнительных органов и с их уменьшенными на малую постоянную величину значениями.
Сигналы с выходов блоков 22 поступают на входы соответствующих блоков 23 численного дифференцирования, реализующих вычисления частных про- . изводных функции Ляпунова-Беллмана по формулам (15), (16). По сигналу с четвертого выхода блока Ц Синхронизации, поступающему через переклю- ч атель 14 на управляющие входы переключателей 24, 25, сигналы о величинах первых частных производных пере-1 менной считываются с первых выходов блоков 23 численного дифференцирования через переключатель 24 на входы
11
Делимого блоков 26 деления, а сигнал О величинах вторых частных производных считываются со вторых выходов блока 23 через переключатель 25 на входы делителя блоков 26. В блоках 26 в соответствии с (17) вычисляется m-сигналов оптимального дискретного управления, поступающих затем на соответствующие исполнительные органы блока 9 испрлнительных органов, воз- Действие которых на объект управления приводит к уменьшению его углов и линейных ускорений.
Таким образом, адаптивная система управления в отличие от прототипа обеспечивает не одинаковые управляющие сигналы для всех исполнительных Органов, а им соответствующие, что позволяет увеличить число управляющих сигналов, а также повысить точность формирования их для исполнительных органов за счет использовани информации о положении исполнительны органов.
формула изобретения
Адаптивная система управления, Содержащая последовательно соединенные блок исполнительных органов, Объект управления, блок датчиков угла и акселерометров, подключенный выходом к информационному входу первого переключателя и входу запуска блока синхронизации,выходы с первого по четвертый которого соединены с информационными входами переключателей соответственно со второго по пятый, а пятый выход - с управляющим входом первого переключателя, подключенного через последовательно соединенные дискретный фильтр Калма- на, шестой переключатель, блок адаптивного формирования управляющего сигнала к входу блока исполнительных органов,, первый информационный вход блока анализа ситуаций подключен к второму выходу блока адаптивного формирования управляющего сигнала, пер- йому входу блока адаптации коэффициентов функционала и через блок экстраполяции - к второму входу блока адаптации коэффициентов функционала, соединенного третьим входом с вторым входом блока экстраполяции, выходом
1
12
5
5
0
5
0
5
0
5
дискретного фильтра Калмана и информационным входом седьмого переключателя, выход которого подключен к второму информационному входу блока анализа ситуаций, а управляющий вход - к выходу блока адаптации коэффициентов функционала, информационному входу восьмого переключателя и входу управления по коэффициентам функционала качества блока анализа ситуаций, соединенного выходом с управляющими входами переключателей со второго по шестой и восьмого выход которого подключен к входу управления перестройкой по коэффициентам функционала качества блока адаптивного формирования управляющего сигнала, соединенного входом управления коммутацией и входом запуска решения при номинальных начальных условиях с выходом пятого переключателя, входом запуска решения при увеличенных начальных условиях и первым входом управления режимами работы - с выходом четвертого переключателя, входом запуска решения при уменьшенных начальных условиях и вторым входом управления режимами работы с выходом третьего переключателя, третьим входом управления режимами работы1 - с выходом второго переключателя, отличающаяся тем, что, с целью расширения области применения за счет увеличения.числа управляющих сигналов и повышения точности их формирования для .соответствующих исполнительных органов, введены блок датчиков положения исполнительных органов, девятый переключатель и дополнительные блоки адаптивного формирования управляющего сигнала, числом на единицу меньшим числа исполнительных органов, выход блока исполнительных органов через последовательно соединенные блок датчиков положения ис- ролнительных органов и девятый переключатель подключен к второму входу дискретного фильтра Калмана, управляющие входы девятого и первого переключателей объединены, одноименные входы и вторые выходы блоков адаптивного формирования управляющего сигнала объединены, а их первые выходы подключены к соответствующим входам блока исполнительных органов.


| Адаптивная система управления | 1984 |
|
SU1179268A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивная система управления | 1987 |
|
SU1464139A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
