11(М+1А5Ги21) Yi i±li5±L -i Mtill2V((+2i i r ilYkili ll tl ( )ofMlBfxH
I 16)
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1988 |
|
SU1575152A1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| Робастный дискретный стохастический фильтр | 2023 |
|
RU2804256C1 |
| Адаптивная система управления | 1984 |
|
SU1179268A1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| Устройство для диагностики и прогнозирования отказов | 1989 |
|
SU1629898A1 |
| Квазиоптимальный регулятор | 1983 |
|
SU1164664A1 |
| Система с переменной структурой | 1978 |
|
SU744453A1 |
| Робастный стохастический фильтр | 2021 |
|
RU2755677C1 |
| Способ определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса и устройство для его осуществления | 2020 |
|
RU2757197C1 |
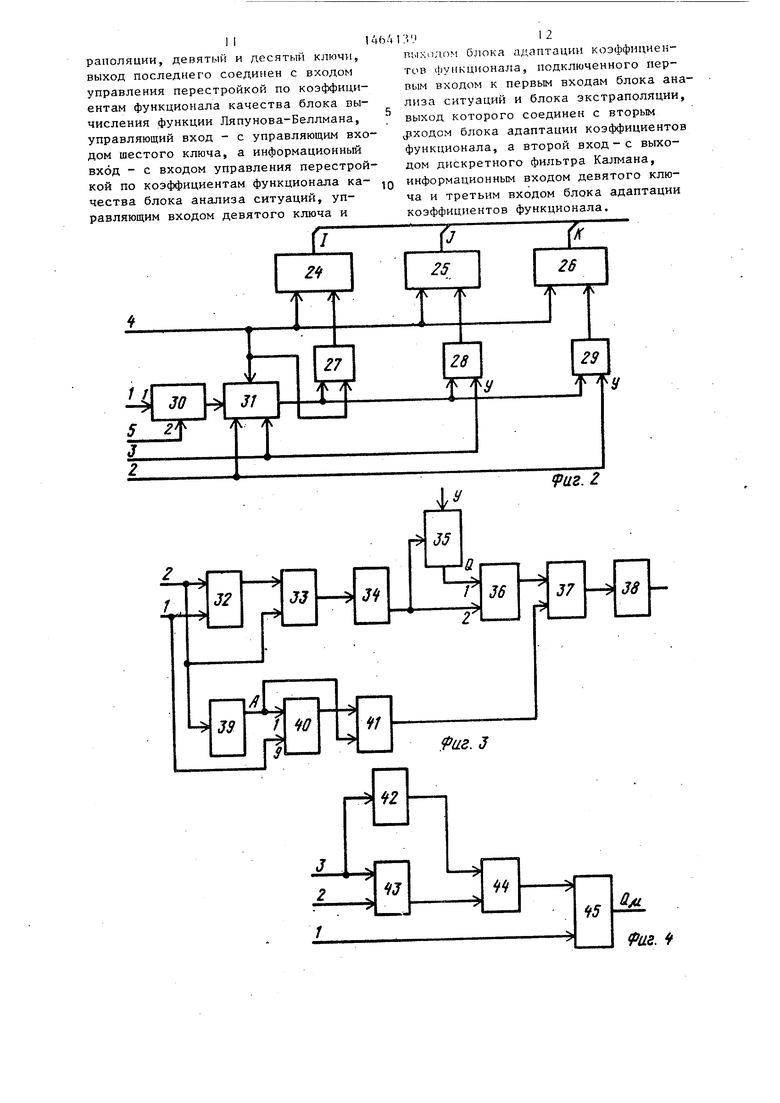
Изобретение относится к автоматике и может быть использовано при управлении динамическими объектами. Цель изобретения - расши-р.ение области применения за счет адаптации к параметрическим и внешним возмущениям. Адаптивная система управления содер жит объект 1 управления, блок 2 датчиков углов и акселерометров, дискретный фильтр 3 Калмана, блок 4 модели свободного движения объекта управления, квадратор 5, блок 6 вычисления функции Ляпунова-Беллмана, блок 7 численного дифференцирования, блок 8 деления, блок 9 исполнительных органов, блок 10 синхронизации, блок 11 адаптации коэффициентов функционала, блок 12 анализа ситуаций, блок 13 экстраполяции, первый - десятый ключи 14 - 23. Цель изобретения- достигается за счет введения-блока 11 адаптации коэффициентов функционала, блока 13 экстраполяции, девятого 22 и десятого 23 ключей. 7 ил. ё6 (Л
малая величина; норма матрицы В ;
функция, вычисленная на основе (14) при начальном условии X р+, ;
функции, вычисленные на основе(14) при начальных
условиях (х fi,o(Bf) и (x,-ofBfj) соответственно.
Таким образом, для вычисления частных производных необходимо трижды ре- шить уравнение модели свободного движения объекта управления на интервале оптимизации ,lj при различных начальных условиях, Подставив (15) и (16) в (10) определяют оптимальное дискретное управление в виде
5 14641396
ff к Yi iili5 i -±iBel-v(p + )
И voL,+i,x-,,+ciB )-2v(и+1,xp„);v(p+т,x;,в;;T
где
1
V о1(1ВрГ
Следовательно, при реализации управления (17) вычисленные значения частных производных необходимо подать ра бл ок деления.
В известной системе формирование управлений (17) осуществляется с постоянными коэффициентами матрицы качества Q (14). У динамических объектов коэффициенты матршда качества должны изменяться в соответствии с изменением динамических характерис- тик объекта. Реализация этого подхо- .да может быть осуществлена следующим образом. На основании (11) с учетом (5) и (8) выражение матрицы качества определяется выражением
Qf rfx-Aj,r..A.(18)
Матрицу Г|к, функции .Ляпунова-Бел лмана можно определить из выражения
Г fi Hii5P ) Г (.,)
(19)
которое следует из (10) при учете (8
Выражения (18) и (19) положены в основу определения матрицы качества . Q,, в процессе работы предлагаемой системы и в отличие от известной реализованы блоками экстраполяции, адаптации коэффициентов функционала, а также перестраиваемыми по коэффициентам функционала качества блоком вычисления функции Ляпунова-Беллмана и блоком анализа ситуаций.
Адаптивная система управления (фиг. 1) работает следующим образом. При наличии ненулевых углов поворота и линейных ускорений объекта 1 управления они измеряются блоком 2 датчиков углов и акселерометров, сигналы с выхода которого поступают на информационный вход первого ключа 14 и вход запуска блока 10 синхронизации. Блок 10 синхронизации- начинает функционировать, с его пятого вы- хбда поступает сигнал на управляющий вход первого ключа 14 и открывает его. Сигналы с выхода блока 2 поступают через ключ 14 на вход дискретно- го фильтра Калмана 3, который пере- ходит в режим решения и на своем выходе формирует сигналы оценки параметров матрицы А., объекта управления Эти сигналы поступают на информацион(17)
ные входы шестого 19 и девятого 22 ключей, третий вход блока 11 адаптации коэффициентов функционала и второй вход блока 13 экстрополяции, на первый вход которого поступают сигналы коэффициентов матриц Г,,,Г,,,, функции Ляпунова-Беллмана с второго выхода блока7 численного дифферен- цирования для двух предьщущих тактов формирования сигнала управления.
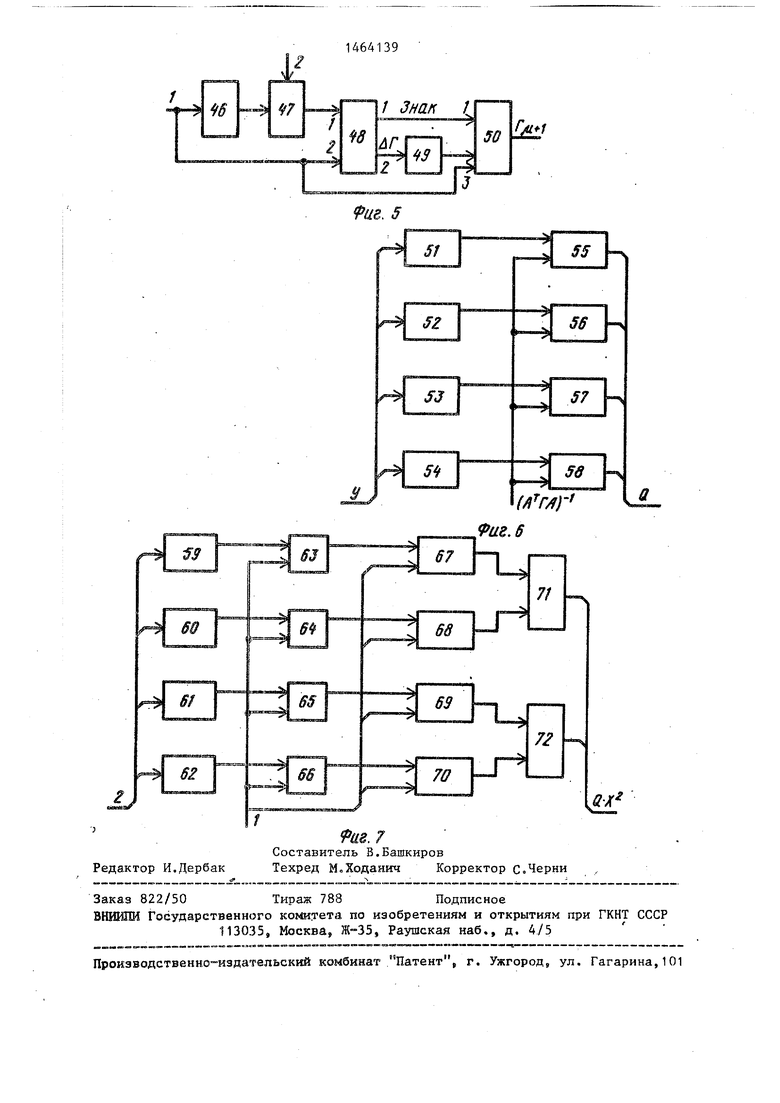
Сигналы с первого входа блока 13 экстраполяции (фиг.5) поступают на вход блока 46 входных регистров, второй вход блока 48 суммирования и третий вход блока 50 реверсивных счетчиков. При поступлении сигналов о значениях коэффициентов матрицы Г и поступлении на управляющий вход ключа 47 сигналов оценки коэффициентов матрицы А, сигналы коэффициенто матрицы Г, переписываются из блока 46 в блок 48. При этом сигналы о значениях коэффициентов матриць Г. записываются в блоки 46, 48 и 50. В блоке 48 суммирования вычисляются сигналы первой разности Г,,, модуль которых .с второго его выхода поступает на вход блока 49 преобразователей частота - код, а знак с первого его выхода - на первый вход блока 50 реверсивных счетчиков, на второй вход которого поступают сигналы с выхода блока 49. В блоке 50 производится суммирование с учетом знака значений коэффициентов матриц Г., иДГ;:,, в результате чего на его выходе формируются сигналы экстраполированных значений коэффициентов .матрицы Г,, функции Ляпунова-Беллмана. Эти сигналы с выхода блока 13 экстраполяции поступают на второй вход блока 11 адаптации коэффициентов функционала (фиг. 4), реализующего вычисление коэффициентов матрицы качества по выражению (18). Сигналы с выхода блока 11 поступают на управляющие входы ключей-22 и 23 и третий вход блока 12 анализа ситуаций. Блок 12 (фиг. 3) формирует сигналы коэффициентов матрицы
1-1 определяет условия ее положитель рй определенности, в которых заключается возможность использования
закона управления, полученного на предыдущем такте формирования, в новом его такте. Сигналы о значении коэффициентов матрицы Qp записываются в регистры 51-54 блока 35 коэффициентов функционала качества. Сигналы коэффициентов матриц Л и Г по ступают на второй и первый входы
ступает сигнал на вход запуска решения с т еньшенными начальными услови ями блока 4, в котором производится определение вектора состояния при начальных условиях (х .,) . Сиг- налы с выхода блока 4, полученные в результате трех решений квадра тор 5, последовательно поступают на
блока 12. На выходе инвертора 34 фор- ю информационный вход блока 5 (фиг.2), мируются коэффициенты инвертированной матрицы (.А) , а на выходе блока 37 суммирования - коэффициенты
обеспечивающего вычисление трех значений функции Ляпунова-Беллмана вида
v(M+i,., )i:(
матрицы 51 , поступающие на вход блока 38 сравнения.
В блоке 38 производится проверка положительной определенности матрицы 57 путем вычисления ее определителя и сравнения его с нулевым сигналом. В случае положительной определенное- ти матрицы SI на выходе блока формируется нулевой сигнал, разрешающий использование управления, полученного на предыдущем такте, в противоположном случае формируется единичный сигнал запрета. В случае нулевого сигнала на выходе блока 12 ключи 15- 19 и 23 разомкнуты,, а блоки 4-6 находятся в исходном состоянии. В случае единичного сигнала на выходе бло- зо сигнала управления. После этого с информационного входа блока 6 сигналы о квадрате решения (хр уравнения модели свободного движения всех р-х . тактов из интервала оптимизации поступают на первый вход блока 55 преобразования коэффициентов функционала качества, в котором они, проходя ключи 63 - 66 (фиг. 7), управляемые от регистров 59-62, умножаются в блоках 67 -70 умножения на соответствующие значения коэффициентов функционала качества, суммируются в блоках 71 и 72, а затем в блоке 31 суммирования с накоплением (фиг. 2), в результате чего в нем формируется сигнал о значении функции V(fj+1 ,х, ) , полученной с начальными условиями, равными оценкам углов и угловых ускорений. При поступлении сигнала с третьего выхода блока 10 синхронизации через ключ 17 на вход управления работой при номинальных начальных условиях блока 6 (фиг.1) этот сигнал проходит на управляющий вход ключа 29 (фиг.2) и первый вход блока считывания блока 31, что обеспечивает считывание значения функции Ляпунова-Беллмана с блока 31 через ключ 29 в регистр 26. Затем аналогичным образам
ка 12 ключи 15 - 19 и 23 замыкаются. При этом сигнал с выхода блока 11 адаптации коэффициентов функционала, характеризующий величину функционала качества Q,,, поступает через ключ 23 на вход управления перестройкой по коэффициентам функционала качества блока 6 вычисления функции Ляпунова- Беллмана. Одновременно сигнал с вько- да Дискретного фильтра Калмана 3 че- рез КЛЮЧ 19 поступает на информационный вход блока 4 модели свободного движения объекта управления, а с четвертого выхода блока 10 синхронизации через ключ 18 поступает сигнал на вход запуска решен14я с номинальными начальными условиями блока 4 модели свободного движения объекта управления, в котором производится определение вектора состояния при номинальных начальных условиях. Затем по сигналу с третьего выхода,блока 10 синхронизации через ключ 17 поступает сигнал на вход запуска решения с увеличенными начальными условиями блока 4, в котором производится решение с начальными условиями (Хр, +1(В.) .
По сигналу с второго выхода блока 10 синхронизации через ключ 16 поступает сигнал на вход запуска решения с т еньшенными начальными условиями блока 4, в котором производится определение вектора состояния при начальных условиях (х .,) . Сиг- налы с выхода блока 4, полученные в результате трех решений квадратор 5, последовательно поступают на
информационный вход блока 5 (фиг.2),
информационный вход блока 5 (фиг.2),
обеспечивающего вычисление трех значений функции Ляпунова-Беллмана вида
v(M+i,., )i:(
на трех решениях х уравнения модели свободного движения с начальными условиями, равными оценкам углов и линейных ускорений и с их уменьшенными и увеличенными на малую постоянную величину значениями.
При работе блока 6 в начале с его входа управления перестройкой по коэффициентам функционала качества информация о коэффициентах матрицы качества поступает на второй вход блока 30 преобразования коэффициентов функционала качества, в регистры 59 - 62 которого (фиг. 7) она записы- вается на каждом такте формирования
о сигнала управления. После этого с ин5
0
формационного входа блока 6 сигналы о квадрате решения (хр уравнения модели свободного движения всех р-х . тактов из интервала оптимизации поступают на первый вход блока 55 преобразования коэффициентов функционала качества, в котором они, проходя ключи 63 - 66 (фиг. 7), управляемые от регистров 59-62, умножаются в блоках 67 -70 умножения на соответствующие значения коэффициентов функционала качества, суммируются в блоках 71 и 72, а затем в блоке 31 суммирования с накоплением (фиг. 2), в результате чего в нем формируется сигнал о значении функции V(fj+1 ,х, ) , полученной с начальными условиями, равными оценкам углов и угловых ускорений. При поступлении сигнала с третьего выхода блока 10 синхронизации через ключ 17 на вход управления работой при номинальных начальных условиях блока 6 (фиг.1) этот сигнал проходит на управляющий вход ключа 29 (фиг.2) и первый вход блока считывания блока 31, что обеспечивает считывание значения функции Ляпунова-Беллмана с блока 31 через ключ 29 в регистр 26. Затем аналогичным образам
0
5
91
в блоке 31 формируется сигнал о значении функции V(/u + 1,x,,), полученной с увеличенньми на d начальными условиями.
После этого по сигналу с второго выхода блока 10 синхронизации через ключ 16, поступающему на вход управления работой при увеличенных на- ;чальнь1х условиях блока 6 и далее на управляющий вход ключа 28 и второй вход считывания блока 31 (фиг, 2), с выхода блока 31 через ключ 28 в регистр 25 считывается значение функции V/(p+1,x,J. Затем в бло- ке 31 формируется сигнап о значении функции V.(p4.1,x,), полученной с .уменьшенными на (-аС) начальными условиями. Указанный сигнал считывается с блока 31 через ключ 27 в регистр 24 при поступлении сигнала с первого выхода блока 10 синхронизации через ключ 15, вход управления работой при уменьшенных начальных условиях блока 6 на третий вход считывания блока 31 и управляющий вход ключа 27.., Одновременно сигнал с входа управления работой при уменьшенных начальных условиях поступает на входы считывания регистров 24 - 26, обеспечивая считыва ние сигналов о трех значениях функции Ляпунова-Беллмана, которые являются выходными сигналами блока 6.
Сигналы с выхода блока 6 поступают на вход блока 7 численного дифференцирования, реализующий .вычисления частных производных функций Ляпунова- Беллмана по формулам (15) и (16). По сигналу с четвертого вьгх:ода блока 10 синхронизации, поступающему через ключ 18 на управляющие входы ключей (20) и (21), сигнал о величине первой частной производной считывается с первого выхода блока 7 численного дифференцирования через ключ 20 на вход делимого блока 8 деления, а сигнал о величине второй частной производной считывается с второго выхода блока 7 через ключ 21 на вход делителя блока 8. Б блоке 8 деления в соответствии с (17) вычисляется оптимальное дискретное управление, поступающее затем на. вход блока 9 исполнительных органов, воздействие которых на объект управления приводит .к изменению его углов и линейных ускорений до заданной величины.
Таким образом, предлагаемая адаптивная система управления в отличие
5 n 5 о
5
5
0
5
13910
от известной является инвариантной к параметрической нестационарности объекта управления на интервале оптимизации, что позволяет расширить область- ее применения.
Формула изобретения
Адаптивная система управления, содержащая последовательно соединенные блок деления, блок исполнитель- ных органов, объект управления, блок датчиков угла и акселерометров, под-, ключенный выходом к входу первого ключа и входу запуска блока синхронизации, выходы с первого по четвертый которого соединены с входами ключей соответственно с второго по пятый, а пятый выход - с управляющим входом первого ключа, подключенного 4epie3 последовательно соединенные дискретный фильтр Калмана, шестой ключ, блок модели свободного движения объекта управления, квадратор, блок вычисления функции Ляпунова- Беллманй - к входу блока численного дифференцирования, первый выход которого через седьмой ключ подключен к входу делимого блока деления, а второй выход через восьмой ключ - к входу делителя блока деления, управляющие входы седьмого и восьмого ключей соединены с выходом пятого ключа и входом запуска решения при номинальных начальных условиях блока мо- дели свободного движения объекта управления, подключенного входом запуска решения при увеличенных начальных условиях к выходу четвертого ключа и первому входу управления режимом работы блока вычисления функции Ляпунова-Беллмана, а входом запуска решения при уменьшенных начальных условиях к выходу третьего ключа и второму входу управления режимом работы блока вычисления функции Ляпунова- Беллмана, третий вход управления режимом работы которого соединен с выходом второго ключа, второй выход блока численного дифференцирования через блок анализа ситуаций подключен к управляющим входам ключей с второго по шестой, отличающаяся тем, что, с целью расширения области применения за счет адаптации к параметрическим и внешним .возмущениям, введены блок адаптации коэффициентов функционала, блок экст1 IU
раполяции, девятый и десятый ключи, выход последнего соединен с входом управления перестройкой по коэффициентам функционала качества блока вы- числения функции Ляпунова-Беллмана, управляющий вход - с управляющим входом шестого ключа, а информационньй вход - с входом управления перестройкой по коэффициентам функционала ка- чества блока анализа ситуаций, управляющим входом девятого ключа и
,3412
выходом блока адаптации коэффициентов функционала, подключенного первым входом к первым входам блока анализа ситуаций и блока экстраполяции, выход которого соединен с вторым (ходом блока адаптации коэффициентов функционала, а второй вход - с выходом дискретного фильтра Калмана, информационным входом девятого ключа и третьим входом блока адаптации коэффициентов функционала.
ipuz.
| Авторское свидетельство СССР № 923293, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивная система управления | 1984 |
|
SU1179268A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
