Изобретение относится к электро- технике и может быть использовано при создании низкоскоростных следящих систем переменного тока с исполнительными двигателями двойного питания.
Целью изобретения является повышение точности регулирования углового положения ротора двигателя двойного питания.
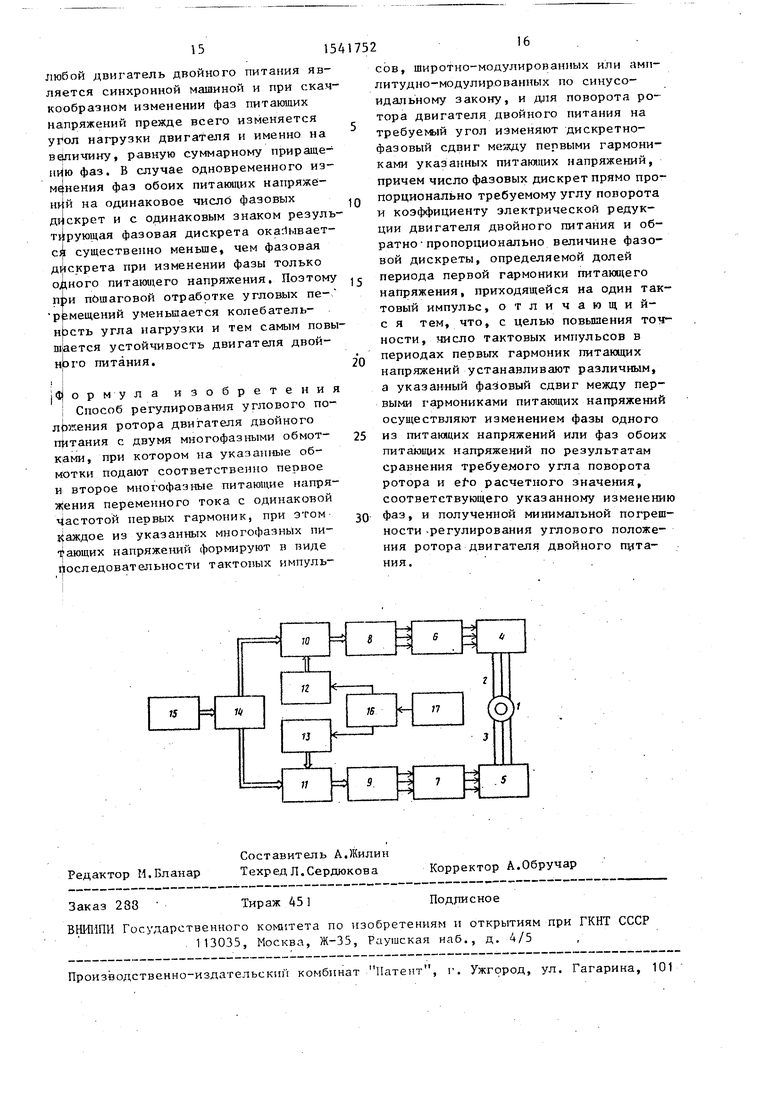
На чертеже представлена функциональная схема электропривода, реализующего способ регулирования углового положения ротора двигателя двойного питания.
Электропривод содержит двигатель 1 двойного питания с двумя многофазными обмотками 2 и 3, инверторы 4 и 5, блоки 6 и 7 управления инверторами, постоянные запоминающие устройства 8 и 9, сумматоры 0 и 11,
счетчики 12 и 13, блок 14 задания приращений фаз, блок 15 задания приращения угла, блок 16 задания тактовых частот и задающий генератор 17«
У двигателя 1 двойного питания обмотки 2 и 3 подключены к выходам инверторов 4 и 5 соответственно. К входу инвертора 4 подключен выход блока 6 управления инвертором, а к входу инвертора 5 - выход блока 7 управления инвертором. К входу блока 6 управления инвертором подключен выход
1 постоянного запоминающего устройства 8, а к входу блока 7 управления инвертором - выход постоянного запоминающего устройства 9. Адресный вход постоянного запоминающего устройства
Сп
4.
сд to
3 соединен с выходом сумматора 10, а адресный вход постоянного запоминающего устройства 9 - с выходом сумматора 11. К первым входам сумматора 10 и 11 подключены выходы счетчиков соответственно 12 и 13 а к вторым входам сумматоров 10 и 11 - соответственно первый и второй выходы блока 14 задания приращений фаз, вход Которого соединен с выходом блока 15 Задания приращения угла. К входам 4четчиков 12 и 13 подключены соответ- 4твенпо первый и второй выходы блока 16 задания тактовых частот, вход Которого соединен с выходом задающего Генератора 17.
Способ регулирования углового положения осуществляют следующим обратом.
Многофазные обмотки 2 и 3 двигателя двойного питания запитывают от отдельных источников питания соответственно первым и вторым многофазными Питающими напряжениями переменного тока одинаковой частоты с широтно-мо- дулированными или амплитудно-модули- ровэнными по синусоидальному закону тактовыми импульсами, и для поворота ротора двигателя на требуемый угол изменяют фазовый сдвиг между питающими напряжениями пропорционально требуемому углу поворота рогора и коэффициенту электрической редукции с дискретностью, определяемой длительностью периода тактовых импульсов. Элементарный шаг перемещения ротора двигателя (дискрета перемещения) определяется фазовой дискретой (наименьшей величиной изменения фазового сдвига между питающими напряжениями) и вычисляется следующим образом:
2
V
2ff
Тг С «
KPJ о
(1)
де о/ - элементарный шаг двигателя
двойного питания; К- - коэффициент электрической редукции (для двигателей двойного питания на основе асинхронных двигателей с фазным ротором равен числу пар полюсов, а для индукторных двигателей двойного питания - числу зубцов ротора); п - число тактовых широтно-моду- лированных или амллитудно- модулированных импульсов в
5
0Г
5
0
5
0
5
0
55
периоде первой гармоники питающих напряжений; f - частота первой гармоники питающих напряжений; f0 - частота тактовых импульсов, широтно-модулированных или амплитудно-модулированных по синусоидальному закону. При равенстве числа тактовых импульсов в периоде первой гармоники первого питающего напряжения и числа тактовых импульсов в пеоиоде первой гармоники второго питающего напряжения величина элементарного шага, вычисляемая по выражению (1), не зависит от того, фаза какого из питающих напряжений изменяется при регулировании. Повышение точности регулирования углового положения ротора двигателя двойного питания может быть обеспечено за счет увеличения числа импульсов в периоде первой гармоники питающих напряжений. Это эквивалентно увеличению частоты тактовых импульсов, что на практике всегда ограничено рядом факторов: быстродействием силовых ключей источников питания, осуществляющих широтную или амплитудную модуляцию, возрастанием динамических потерь в источниках питания при увеличении частоты работы ключей. Эти ограничения существенны, если двигатель двойного питания рассчитан на высокую частоту питающих напряжений (400 Гц и более по первой гармонике). В этом случае частота тактовых имьульсов f0, необходимая в соответствии с выражением (1) для обеспечения требуемого элементарного шага перемещения ротора двигателя (т.е. заданной точности регулирования), может оказаться недопустимо высокой и практически не реализуемой.
В соответствии с рассматриваемым способом число тактовых импульсов в периоде первой гармоники первого питающего напряжения устанавливают отличным от числа тактовых импульсов в периоде первой гармоники второго питающего напряжения, а величину и знак изменения фаз каждого питающего напряжения определяют из условия минимума отклонения действительного угла поворота ротора от требуемого.
Фазу первого и фазу второго питающих напряжений можно изменять на одинаковое число фазовых дискрет, кратное разности между фазовой дискретой
первого питающего напряжения и фазовой дискретом второго питающего напряжения, при это знаки изменения фаз первого и второго питающих напряжений устанавливают одинаковыми и соответствующими требуемому направлению перемещения ротора двигателя двойного питания.
Способ регулирования углового положения ротора двигателя двойного -питания реализует шаговый режим работы двигателя с шагом, кратным задаваемому фазовому сдвигу между питающими напряжениями. В начале и в конце регулирования двигатель двойного питания находится в режиме синхронного стояния за счет равенства частот обоих питающих напряжений, что позволяет надежно фиксировать угловое положение ротора. Изменение фазового сдвига между питающими напряжениями фактически означает разовое (на одном периоде первой гармоники питающих напряжений) изменение частот питающих напряжений, что вызывает появление импульса вращающего момента и перемещения ротора на некоторый угол. Этот угол пропорционален заданному изменению фазового сдвига между питающими напряжениями и обратно пропорционален коэффициенту электрической редукции. Поэтому для поворота ротора двигателя на требуемый угол фазовый сдвиг между питающими напряжениями изменяет пропорционально требуемому углу поворота ротора и коэффициенту электрической редукции.
Так как питание обмоток двигателя Двойного питания осуществляется ши- ротно-модулировэнными или амплитудно- модулировэнными по синусоидальному закону импульсами (для получения наибольшей величины первой-гармоники и уменьшения влияния высших гармоник), то изменение фазового сдвига между питающими напряжениями осуществляется дискретно с дискретностью, определяемой длительностью периода тактовых импульсов (в долях периода первой . гармоники питающих напряжений, приходящихся на один тактовый импульс). Могут быть четыре варианта изменения фазового сдвига между питающими напря
жекиями: изменение фазы только перво- совместном изменении фаз обоих питающих напряжений с разными знаками приращений фаз (фаза одного питающего
го питающего напряжения (с фазовой дискретой первого питающего напряжения), изменение фазы только второго питающего напряжения (с фазовой дискнапряжения увеличивается, а другого уменьшается).результирующая дискрета
10
5
5
ретой второго питающего напряжения), совместное изменение фаз первого и второго питающих напряжений с одинаковыми знаками приращения фаз (обе фазы увеличиваются или обе фазы уменьшаются) и совместное изменение фаз первого и второго питающих напряжений с разными знаками приращения фаз (увеличение фазы одного питающего напряжения и уменьшение фазы другого питающего напряжения).
Так как число тактовых импульсов в периоде первой гармоники первого питающего напряжения устанавливают отличным от числа тактовых импульсов в периоде первой гармоники второго питающего напряжения (при этом частота первых гармоник обоих питающих 0 напряжений одинаковы), то величина фазовой, дискреты (и величина элементарного шага перемещения ротора) зависит от указанных вариантов изменения фазового сдвига между питающими напряжениями. В случае изменения фазы только первого питающего напряжения фазовая дискрета равна той доле периода первой гармоники первого питающего напряжения, которая приходится на один тактовый импульс первого питающего напряжения. В случае изменения фазы только второго питающего напряжения фазовая дискрета равна доле периода первой гармоники второго питающего напряжения, приходящейся
v
ка один тактовый импульс второго пи- тающего напряжения, и отличается по величине от фазовой дискреты первого питающего напряжения (поскольку число тактовых импульсов в периоде первой гармоники первого и второго питающих напряжений различно).
При совместном изменении фаз обоих питающих напряжений с одинако- 5 выми знаками прирашений фаз (одновре- менное увеличение или одновременное уменьшение) результирующая фазовая дискрета равна разности между фазовой дискретой первого питающего напряжения и фазовой дискретой второго питающего напряжения (т.е. тоже отличается от фазовых дискрет в первых двух вариантах изменения фазового сдвига между питающими напряжениями). При
0
5
0
0
напряжения увеличивается, а другого уменьшается).результирующая дискрета
1541752
равна сумме дискрет первого и второг питающих напряжений.
Таким образом, имеется возможност выбора величины фазовой дискреты (че тыре различных величины), для чего задают-тот или иной вариант изменени фйзового сдвига между питающими нап- рйжениями. Четвертый вариант изменения фазового сдвига между питающими напряжениями может быть сведен к лоо л довательной реализации первых двух вариантов (так как ротор двигателя перемещается в одном направлении). Основными являются первые три вариан та изменения фазового сдвига между питающими напряжениями. Выбор варианту осуществляется из условия миниму- мЈ отклонения действительного угла поворота ротора от требуемого. Наличие трех возможных величин фазовой дискреты позволяет выбирать такую комбинацию приращении фаз первого и второго питающих напряжений, которая обеспечивает в сравнении с известным решением уменьшение ошибки угла поворота ротора.
Регулирование углового положения ротора двигателя двойного питания происходит следующим образом.
Двигатель двойного питания имеет первую 2 и вторую 3 многофазные обмотки. Например, у двигателя двойного питания на основе асинхронного дви- г ателя с фазным ротором первой об мот- Кой является обмотка статора, а второй - обмотка ротора, У индукторного двигателя двойного питания обе обмотки располагаются на статоре. Первую И вторую многофазные обмотки двигателя двойного питания запитывают от отдельных источников питания (инверторов) тактовыми импульсами, широтно- модулированными или амплитудно-моду- лировэнными по синусоидальному закону. Первые гармоники (огибающие) обоих питающих напряжений имеют в точности одинаковую частоту. Это легко может быть обеспечено синхронизацией работы обоих инверторов от одного задающего генератора. Широтная или амплитудная модуляция позволяет уменьшить содержание высших гармоник в питающих напряжениях. Вынужденнаясоставляющая угловой скорости ротора двигателя двойного питания в общем виде определяется следующим выражением:
(t) .ш
Д L / v
(2)
иг
5
0
где t - время;
Wp- угловая скорость ротора; угловые частоты первых гармоник соответственно первого и второго питающих напряжений.
Так как частоты питающих напряжений одинаковы, т.е. to, oo2, то в соответствии с выражением (2) ротор двигателя неподвижен (режим синхронного стояния). Формулу для угла поворота ротора получают, интегрируя выражение (2):
it
if,(t) J (t)dt ™ S u,(t) I0.Kp 0
0
5
- u,(t)dt + Ц- 1
po
(3)
5 0 5 Q jfbJif/t) - d(t) + q)po,
где ij g- начальный угол поворота
ротора (до начала регулирования) ;
dcf, , приращения фаз соответственно первого и второго питающих напряжений; измерение всех углов ведется относительно общей оси координат, связанной со статором.
Если приращения фаз равны нулю (регулирования нет), то ротор неподвижен и угол его поворота цро . Если задать приращение одной из фаз, то в соответствии с выражением (3) ротор повернется на некоторый угол Л относительно прежнего углового положения. Направление перемещения ротора зависит от того, фаза какого питающего напряжения меняется и в какую сторону (в сторону увеличения или в сторону уменьшения). Так как питающие напряжения представляют собой последовательности тактовых импульсов, широтно-модулированных или амплитудно-модулированных по синусоидальному закону, то существует минимальное значение приращения фазы (фазовая дискрета) для каждого из питающих напряжений:
.
лес -. d и - 4)
I/KU 1-1
1
чг мин n i
1 МИН П
г Де ,ИН
и d IP- фаз овые дискреты соответ 2. W И Н
ственно первого и второго питающих напряжений;
n
и п - число тактовых импульсов в периоде первой гармоники соответственно первого и второго питающих напряжений.
Изменение фазы каждого питающего , напряжения осуществляется дискретно, а величины дискрет определяются в соответствии с (А).
С учетом выражений (3) и (4) результирующая фазовая дискрета difon- ределяется следующим образом:
&Ч,
(5)
Л1 1/мннт ч4мд„, а элементарный шаг двигателя двойного
питания
. &ч ач - йч1мну
. -- --- --- - . --
К
к,
Ш 1 , (6)
1 2Ј.
Кр In, пг J Кр L п,пг
Так как согласно спогобу п , Ф- nit
то и йЧ,иН &Ч «нъ-Эт° означает, что результирующая фазовая дискрета di/в соответствии с (5) имеет различную величину в зависимости от того, фаза какого из питающих напряжений меняется. Это позволяет выбирать для изменения ту фазу, которая обеспечивает наименьшее отклонение действительного угла поворота ротора от требуемого. Программа изменения фаз зависит от величины требуемого угла поворота, но для каждой конкретной величины .требуемого угла поворота она определяется однозначно, так как всегда существует единственная комбинация приращений фаз первого и второго питаюших напряжений, которая обеспечивает минимум отклонения действительного угла поворота ротора от требуемого.
Технически наиболее просто реализуется такая программа регулирования, при которой фазы обоих напряжений изменяются одинаково (одновременно увеличиваются или одновременно уменьшаются) и на одинаковое количество дискрет. В этом случае результирующая фазовая дискрета (и элементарный шаг двигателя) имеют наименьшую величину, т.е. обеспечивается высокая точность регулирования углового положения ротора. Согласно выражению (6) умень - шить величину элементарного шага можно не только путем увеличения числа тактовых импульсов в периоде первой
гармоники питающих напряжении, но и выбором близких значений чисел импульсов для первого и второго питающих напряжений (т.е. уменьшением разности п г - и ) . Это позволяет при относительно невысоких частотах тактовых импульсов получать весьма малые значения элементарного шага.
0 Сравним по точности режим изменения фазы только одного питающего -напряжения с режимом совместного изменения фаз обоих питающих напряжений. Пусть число тактовых импульсов в пе5 риоде первой гармоники первого питающего напряжения равно п, а число тактовых импульсов в периоде первой гармоники второго питающего напряжения равно п + ,зп. Элементарный шаг пере-
0 мещения ротора двигателя при изменении фаэы только одного (второго) питающего напряжения
2ff + лпУ
of
5
Кр(п
Элементарный шаг переменного ротора двигателя двойного питания при совместном изменении фаз обоих питаю- j
щих напряжений на одну дискрету определяется в соответствии с выражением (6)
2-й
К,
йп
nOi
Отношение а( / d показывает, ва сколько раз шаг при совместном изменении фаз обоих питаюших напряжений меньше шага при изменении фазы только одного питающего напряжения:
7- Я-
Например, для трехфазных двигателей из соображений-симметрии число тактовых импульсов в периоде первой гармоники питающих напряжений должно быть кратным шести. Поэтому наименьшее значение an - 6. При типичном значении п, п 24 (и п г п + + йп 30) согласно выражению (7)
7, 4,
т.е. при совместном изменении фаз обоих питающих напряжений величина элементарного шага перемещения ротора двигателя двойного питания уменьшается в четыре раза по сравнению с режимом изменения фазы только одного питающего напряжения.
1 1
Электропривод, реализующий способ регулирования углового положения ротора двигателя двойного питания, работает следующим образом.
Обмотки 2 и 3 двигателя 1 двойного питания чапитаны от отдельных инверторов питающими напряжениями с одинаковой частотой первой гармоники Питающие напряжения представляют собой последовательности импульсов, ши ротно-модулированные или амгоштудно- модулированные по синусоидальному закону. Инверторы 4 и 5 содержат силовые ключи для осуществления модуляции. Блоки б и 7 управления инверторами формируют управляющие импульсы для силовых ключей инверторов 4 и 5 соответственно. На входы блоков 6 in 7 управления инверторами поступают импульсы с постоянных запоминающих устройств 8 и 9 соответственно, обе- спечивающие получение многофазных (в данном слечае - трехфазных) питающих напряжений. В постоянные запоми- ающие устройства 3 и 9 заранее записана информация о состоянии силовых Ключей.
При последовательном считывании Этой информации на выходах постоян- йых запоминающих устройств 8 и 9 формируются такие, последовательности импульсов, которые обеспечивают си- |Нусоидальную форму выходных напряжений инверторов 4 и 5 (средних значений этих напряжений). При этом легко обеспечивается и требуемый фазовый сдвиг между фазами каждого из питающих напряжений (для трехфазной систе мы 120°). Последовательное считывание информации о состоянии силовых ключей из постоянных запоминающих устройств 8 и 9 осуществляется с помощью сигналов с выходов сумматоров 10 и 11 соответственно. Эти сигналы поступают на адресные входы постоянных запоминающих устройств 8 и 9, на выходах которых появляются сигналы, считанные из ячеек с адресами, соответствующими сигналаи с выходов сумматоров 10 и 11. Задающий генератор 17 синхронизирует работу обоих инверторов 4 и 5, обеспечивая равенсво частот первых гармоник обоих питающих напряжений.
Блок 16 задания тактовых частот формирует из частоты задающего генератора 17 две тактовые частоты (две последовательности тактовых импуль
12
5
0
5
0
5
0
5
0
5
сов с близкими, но различными частотами). Счетчики 12 и 13 осуществляют подсчет тактовых импульсов соответственно первого и второго питающих напряжений (получаемых от инверторов 4 и 5 соответственно), т.е. фактически формируют текущее значение фаз питающих напряжений. Емкость счетчиков 12 и 13 выбирается равной числу тактовых импульсов в периоде первой гармоники соответственно первого и второго питающих напряжений. При отсутствии регулирования текущие значения фаз питающих напряжений с выходов счетчиков 12 и 13 передаются через сумматоры 10 и 11 на адресные входы постоянных запоминающих устройств 8 и 9 соответственно и ебеспечивается последовательное считывание импульсов управления состоянием силовых ключей из ячеек постоянных запоминающих устройств 8 и 9.
Блок 15 задания приращения угла задает электроприводу требуемое изменение углового положения. Блок 14 задания приращения фаз выполняет функции регулятора и в зависимости от величины заданного приращения угла формирует задания для приращения фаз каждого из питающих напряжений. На выходах блока 14 появляются коды чисел, равных числам дискрет, на которые необходимо изменить фазы питающих напряжений (для каждого питающего напряжения - свое значение). Сумматоры 10 и И прибавляют заданные приращения фаз к текущим фазам, получаемым с выходов счетчиков 12 и 13 соответственно. В результате на входы постоянных запоминающих устройств 8 и 9 поступают коды фаз, увеличенные на заданные приращения фаз. При отсутствии регулирования коды на выходах счетчиков J2 и 13 увеличиваются равномерно на единицу с приходом каждого импульса от блока 16 задания тактовых частот и также равномерно изменяются коды на входах постоянных запоминающих устройств 8 и 9.
При регулировании углового положения ротора двигателя двойного питания к равномерно изменяющимся кодам с выходов счетчиков 12 и 13 прибавляются с.помощью сумматоров 10 и 11 дополнителтэные коды прирашений фаз с первого и второго выходов блока 14 задания приращений фаз соответственно, Б результате при просмотре ячеек
в постоянных запоминающих устройствах 8 и 9 происходит проскакивамие через несколько очередных ячеек (при положительном приращении соответствующей фазы) или возврат к предыдущим ячейкам (при отрицательном приращении соответствующей фазы) на такое количество ячеек, которое задано блоком 14 задания приращений фаз. Таким образом обеспечивается изменение фаз питающих напряжений и фазового сдвига между ними. В результате ротор двигателя двойного питания поворачивается на угол, заданный блоком 15 задания приращения угла.
Алгоритм работы блока 14 задания приращений фаз, с помощью которого определяют величину и знак приращения фазы каждого питающего напряжения, может быть, например, таким, что приращения фаз обоих питающих напряже - ний, выраженное в числе фазовых дискрет, выбирают одинаковыми как по величине, так и по знаку. Результирующая фазовая дискрета фазового сдвига между питающими напряжениями в этом режиме равна разности между фазовой дискретой первого питающего напряжения и фазовой дискретой второго питающего напряжения, а элементарный шаг двигателя двойного питания прямо пропорционален результирующей фазовой дискрете (и обратно пропорционален коэффициенту электрической редукции). Поэтому число фазовых дискрет, на которое должны измениться фазы обоих питающих напряжений, оказывается кратным результирующей фазовой дискрете, чтобы двигатель двойного питания мог отработать заданное блоком 15 задания приращения угла перемещение ротора.
Инверторы 4 и 5 содержат силовые ключи, с помощью которых осуществляется широтная или амплитудная модуляция тактовых импульсов. При широтной модуляции трехфазного напряжения инверторы содержат по три стойки силовых ключей, например транзисторных, с обратными диодами. При амплитудной модуляции ключи могут, например, обеспечивать коммутацию обмоток трансформатора (первичных), в то время как на вторичной обмотке трансформатора формируются суммарные амплитудно-мо- дулированные напряжения, Блоки 6 и 7 управления, инверторами содержат предварительные усилители и (в случае не-
0
5
0
обходимости, в зависимости от построения инверторов 4 и 5) элементы гальванической развязки, выполняемые по известным схемам. Постоянные запоминающие устройства 8 и 9 представляют из себя микросхемы ПЗУ с соответствующими цепями управления в типовом включении. Сумматоры 10 и 11 могут быть выполнены на микросхемах (арифметические логические устройства,, представляющие собой отдельные микросхемы) в типовом включении.
3 качестве счетчиков 12 и 13 могут использоваться готовые счетчики на микросхемах, входящие в любой современный набор микросхем, с дополнительными цепями, обеспечивающими требуемую емкость счетчиков, подключаемыми в соответствии с известными схемами. Блок 16 задания тактовых частот представляет собой два делителя частоты на микросхемах (триггерах или счетчиках). Задающий генератор 5 является обычным мультивибратором. Блок 14 задания приращений .фаз целесообразнее всего выполнять в виде - микроЭЗМ. В качестве блока 15 задания приращения угла может использоваться управляющая ЭВМ более высокого уровня управления.
Таким образом, предлагаемый способ регулирования углового положения ротора двигателя двойного питания обеспечивает в сравнении с известным решением повышение точности регулирования углового положения ротора, так как имеется возможность выбора величины элементарного шага перемещения ротора двигателя (путем задания изменения фазы того или другого питающих напряжений). Предлагаемый алгоритм задания приращения фаз питающих напряжений позволяет получить наимень- с шую из возможных величину элементарного шага двигателя двойного питания, в соответствии с которым фазы обоих питающих напряжений изменяют на одинаковое число фазовых дискрет и с одним знаком. Получаемый при этом элементарный шаг двигателя двойного питания в несколько раз меньше, элементарного шага, обеспечиваемого в известном решении при тех же значениях частот тактовых импульсов.
Кроме того, предлагаемый способ обеспечивает повышение устойчивости двигателя двойного питания в переходных режимах. Это связано с тем, что
0
5
0
0
5
любой двигатель двойного питания является синхронной машиной и при скачкообразном изменении фаз питающих напряжений прежде всего изменяется угол нагрузки двигателя и именно на величину, равную суммарному приращению фаз. В случае одновременного иэ- м4нения фаз обоих питающих напряжений на одинаковое число фазовых дискрет и с одинаковым знаком результирующая фазовая дискрета окапывается существенно меньше, чем фазовая дискрета при изменении фазы только одного питающего напряжения, Поэтому при пошаговой отработке угловых пе- р мещений уменьшается колебатель- н{эсть угла нагрузки и тем самым повышается устойчивость двигателя двойного питания.
формула изобретения Способ регулирования углового по- л0зг.ения ротора двигателя двойного питания с двумя многофазными обмотками, при котором на указанные обмотки подают соответственно пеовое и второе многофазные питающие напря- переменного тока с одинаковой Частотой первых гармоник, при этом Каждое из указанных многофазных питающих напряжений формируют в виде Последовательности тактовых импулъQ
0
5
0
сов, широтно-модулированных или амп- литудно-модулированных по синусоидальному закону, и для поворота ротора двигателя двойного питания на требуемый угол изменяют дискретно- фазовый сдвиг между первыми гармониками указанных питающих напряжений, причем число фазовых дискрет прямо пропорционально требуемому углу поворота и коэффициенту электрической редукции двигателя двойного питания и обратно-пропорционально величине фазовой дискреты, определяемой долей периода первой гармоники питающего напряжения, приходящейся на один тактовый импульс, отличающий- с я тем, что, с целью повышения точности, число тактовых импульсов в периодах пеовых гармоник питающих напряжений устанавливают различным, а указанный фазовый сдвиг между первыми гармониками питающих напряжений осуществляют изменением фазы одного из питающих напряжений или фаз обоих питающих напряжений по результатам сравнения требуемого угла поворота ротора и его расчетного значения, соответствующего указанному изменению фаз, и полученной минимальной погрешности регулирования углового положения ротора двигателя двойного питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1986 |
|
SU1372582A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| Способ управления двигателем двойного питания | 1987 |
|
SU1515326A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1977 |
|
SU699643A2 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
Изобретение относится к электротехнике и может быть использовано при создании низкоскоростных следящих систем переменного тока. Цель изобретения - повышение точности регулирования углового положения ротора двигателя двойного питания. Существо способа заключается в том, что на две многофазные обмотки двигателя двойного питания подают питающие напряжения с одинаковой частотой, при этом каждое из этих напряжений формируют в виде модулированной последовательности тактовых импульсов и для поворота ротора изменяют дискретно фазовый сдвиг между напряжениями, число тактовых импульсов в периодах напряжений устанавливат различным и изменяют фазу того питающего напряжения или фаз обоих напряжений, которое обеспечивает минимальную погрешность регулирования углового положения. 1 ил.
Редактор М.Бланар
Составитель А.Жилин Техр ед Л. Сердюков а
Заказ 283
Тираж 451
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
©
Корректор А.Обручар
Подписное
| Электропривод | 1983 |
|
SU1179511A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1986 |
|
SU1372582A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
