00 о IND
О)
Изобретение относится к машиностроению и может быть использовано при создании и разработке средств автоматизации технологических процессов и складских работ.
Цель изобретения - повышение точности позиционирования, надежности и упрощение управления шарниром.
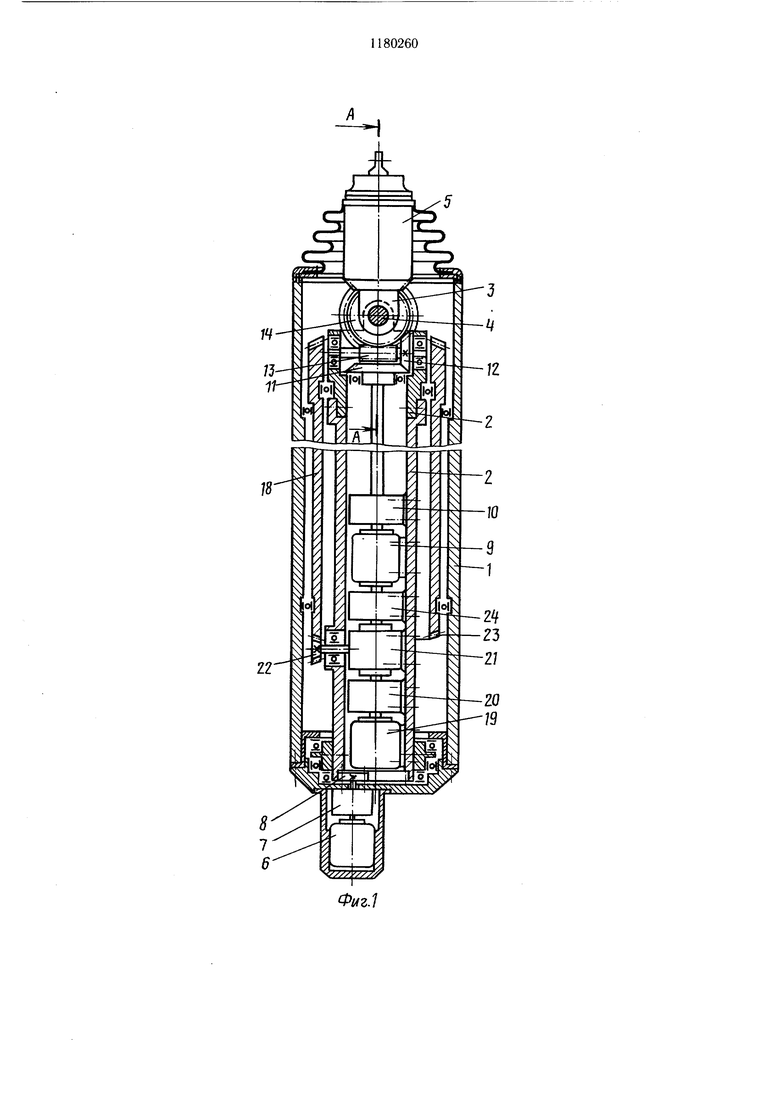
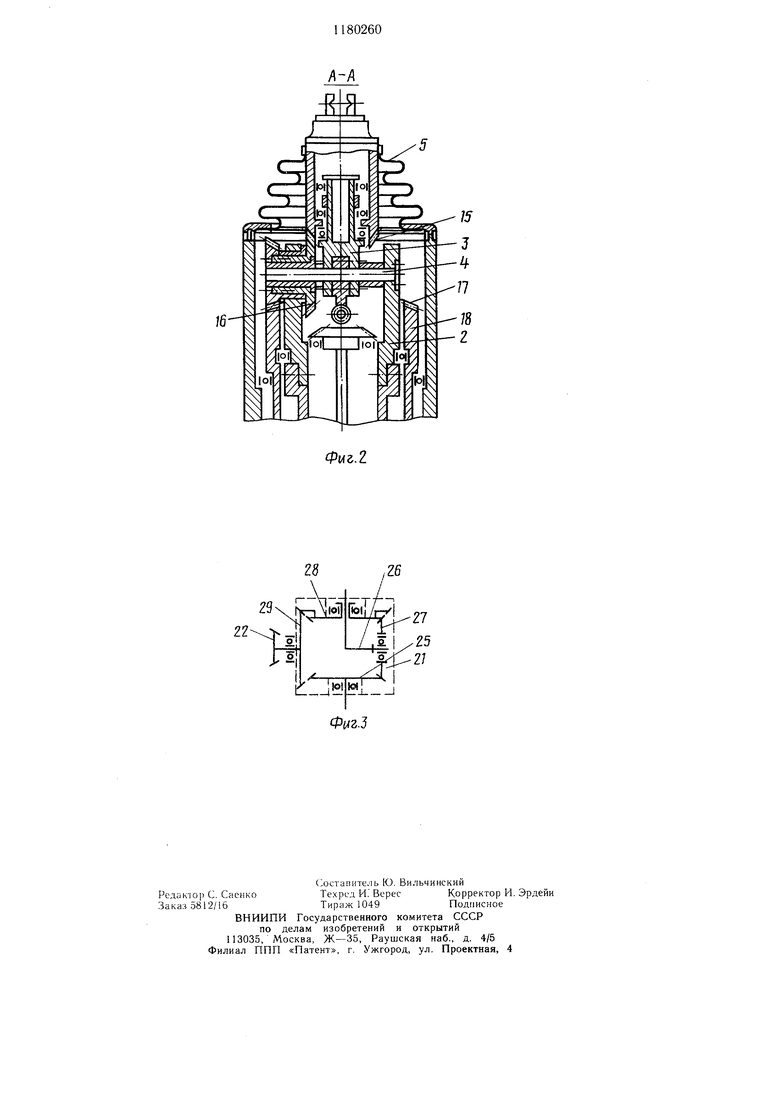
На фиг. 1 изображен предлагаемый шарнир манипулятора, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - кинематическая схема сум ми руюш.его механизма.
Шарнир манипулятора содержит закрепленную на предыдущем звене 1 основную опору 2 и промежуточную опору 3с осью 4, установленную с возможностью вращения относительно последующего звена 5. Основная опора 2 установлена с возможностью вращения в предыдущем звене 1 и снабжена приводом этого вращения, включающим электродвигатель 6, редуктор 7 и шестерню 8. Во внутренней полости основной опоры 2 установлен привод качания последующего звена 5, содержащий электродвигатель 9, редуктор 10, конические колеса И и 12, червяк 13, взаимодействующий с червячным колесом 14, установленным на оси 4 и жестко связанным с промежуточной опорой 3. На последующем звене 5 выполнена зубчатая нарезка 15, взаимодействующая с блоком 16 паразитных шестерен, установленным на оси 4 промежуточной опоры 3 и входящим в зацепление с зубчатой нарезкой 17 полой трубы 18 (вала), также установленной с возможностью вращения в предыдущем звене 1. В основной опоре 2 расположены электродвигатель 19 привода вращения последующего звена 5 вокруг своей оси, редуктор 20, суммирующий механизм 21, выходная щестерня (коническое колесо 22) которого взаимодействует с зубчатой нарезкой 23, выполненной на противоположном конце полой трубы 18. Суммирующий механизм -21 кинематически связан с электродвигателем 9 привода качания через редуктор 24, а с электродвигателем 19 привода вращения последующего звена 5 - через редуктор 20. Суммирующий механизм 21 содержит коническое колесо 25, вал которого связан с редуктором 20, поводок 26 с сателлитным колесом 27, связанный с редуктором 24, блок 28 конических колес, кинематически связанный через конические колеса 29 и 22 с зубчатой нарезкой 23 полой трубы 18. Место соединения предыдущего и последующего звеньев ограждено гофрированным эластичным патрубком.
Устройство работает следующим образом.
Вращение последующего звена 5 относительно предыдущего звена 1 осуществляется при включении электродвигателя 6, который через редуктор 7 и шестерню 8 приводит во вращение основную опору 2, а вместе с ней и последующее звено 5. Качание последующего звена 5 относительно оси 4 осуществляется от электродвигателя 9 через редуктор 10, конические колеса 11 и 12 и червяк 13 при этом поворачивает червячное колесо 14, которое вместе с промежуточной опорой 3 наклоняет и последующее звено 5, причем вместе с поворотом червячного колеса 14 происходит поворот блока 16 паразитных шестерен на тот же угол и в ту же сторону, что приводит к отсутствию разворота последующего звена 5 вокруг своей оси при его наклоне. Синхронность поворота червячного колеса 14 и блока 16 паразитных шестерен обеспечивается за счет того, что при включении электродвигателя 9 вращение передается через редуктор 24 на поводок 26 суммирующего механизма 21. При этом сателлитное колесо 27 обкатывается по неподвижному в данный момент колесу 25, что приводит во вращение блок 28 конических колес, который в свою очередь через конические колеса 29 и 22 (фиг. 3) разворачивает полую трубу 18, а следовательно и блок 16 паразитных щестерен. Вращение последующего звена 5 вокруг своей оси осуществляется при включении электродвигателя 19, который передает вращение через редуктор 20, коническое колесо 25 суммирующего механизма 21, сателлитное колесо 27 (поводок 26 при этом неподвижен), блок 28 конических колес, конические колеса 29 и 22 на полую трубу 18, которая через блок 16 паразитных щестерен приводит во вращение последующее звено 5 вокруг своей оси. Таким образом, осуществляется три независимых движения последующего звена относительно предыдущего звена.
Использование предлагаемого щарнира манипулятора по сравнению с известным позволяет повысить точность позиционирования за счет использования в качестве силовых двигателей электродвигателей, а также за счет наличия в приводе качания последующего звена червячной пары, червячное колесо которой связано с промежуточной опорой, что также обеспечивает надежную фиксацию последующего звена в угловом положении за счет самоторможения червячной пары. Наличие трех независимых движений последующего звена упрощает управление перемещения этого звена и в конечном итоге программирование конечными перемещениями манипулятора.
w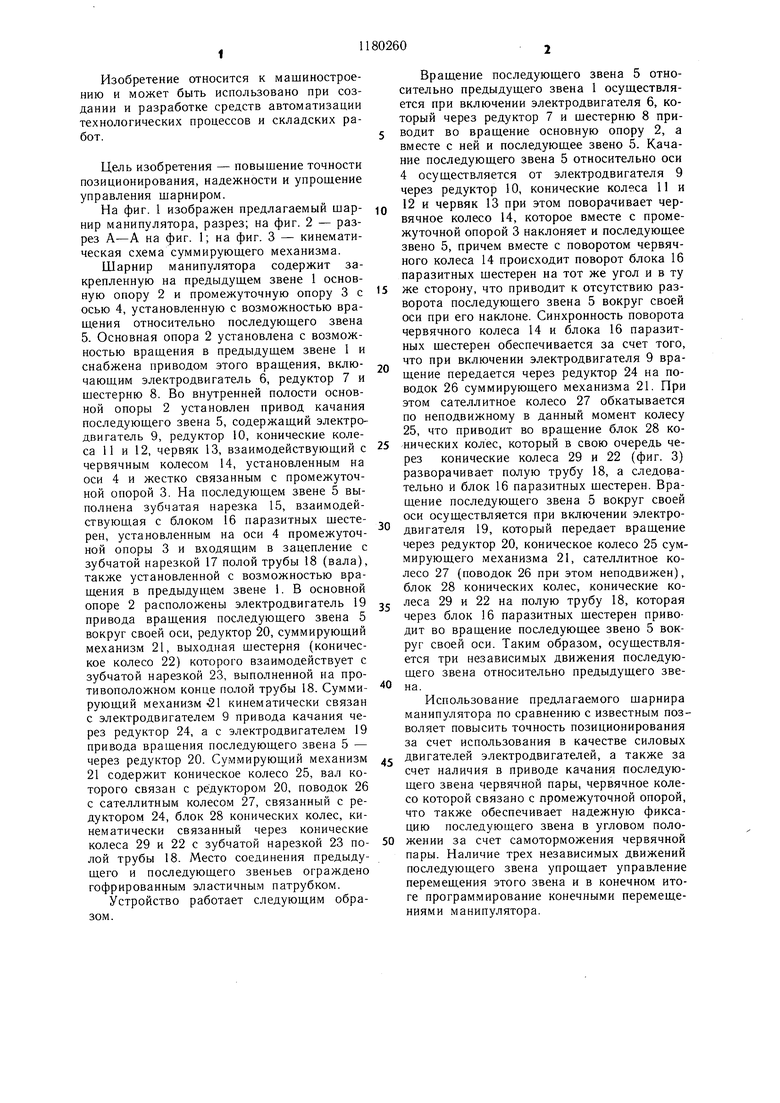
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1983 |
|
SU1140946A1 |
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| Станок для обработки оптических деталей | 1979 |
|
SU998099A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2075737C1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
Л. ШАРНИР МАНИПУЛЯТОРА, содержащий основную опору, установленную на предыдущем звене, и промежуточную опору, установленную в основной опоре с возможностью вращения, а также привод вращения основной опоры, установленный в предыдущем звене, привод качания и привод вращения последующего звена, жестко закрепленные на основной опоре, причем привод вращения последующего звена содержит полый вал с зубчатой нарезкой и блок паразитных шестерен, свободно посаженный на оси промежуточной опоры и связанный с последующим звеном, отличаю щийся тем, что, с целью повыщения точности позиционирования, надежности и упрощения управления щарниром, основная и промежуточная опоры снабжены червячной парой, червячное колесо которой установлено на оси промежуточной опоры и жестко связано с последней, а червяк установлен в основной опоре перпендикулярно оси качания промежуточной опоры и связан посредством дополнительно введенной пары конических зубчатых колес с приводом качания последующего звена, причем приводы вращения и качания последующего звена кинематически связаны между собой посредством введенного в шарнир суммирующего механизма с коническими колесами. i 2. Шарнир по п. 1, отличающийся тем, что передаточное отношение цепи червяч(Л ное колесо - привод качания последующего звена равно по величине передаточному отношению цепи блок паразитных шестерен - суммирующий механизм-привод качания последующего звена.
| Шарнир манипулятора | 1982 |
|
SU1076277A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
