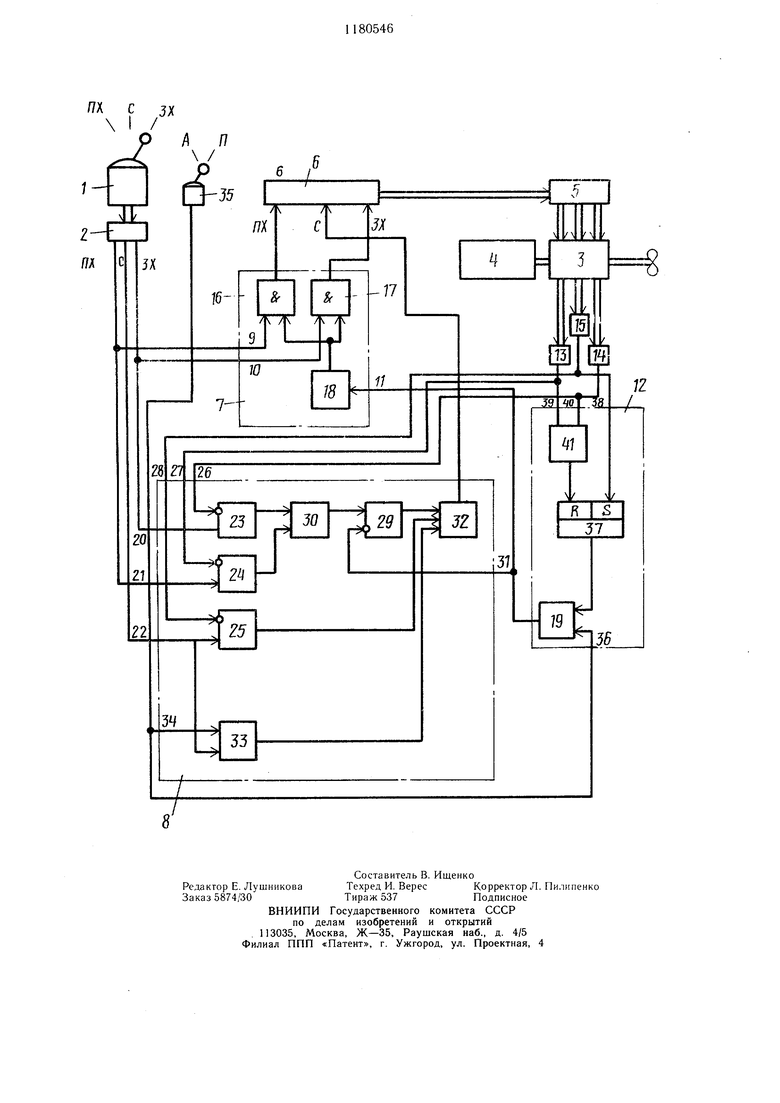
Изобретение относится к устройствам дистанционного управления реверсом судовых дизелей. Цель изобретения - повышение надежности. На чертеже представлена схема системы. Система содержит дистанционный командный орган 1, формирователь 2 команд на переключение реверс-редукторной трехпозиционной передачи 3, на передний ход (ПХ), задний ход (ЗХ) и отключение - стоп (С) гребного вала от двигателя 4 (остановку гребного вала). Управление передачей 3 осупдествляется командным органом 5, расположенным на двигателе, к которому подсоединен сервомотор 6, принимающий команды ПХ, ЗХ, С и перекладывающий командный орган 5 в заданное положение. Формирование команд ПХ и ЗХ сервомотора осуществляется с помопдью блока 7 управления крайни.ми позициями передачи, а команды С - блоком 8 управления средней позицией. Блок 7 своим первым и вторым входами 9 и 10 соединен с формирователем 2, а третьим входом 11 -- с блоком 12 формирования сигнала позиции передачи, формирующим информационный сигнал по сигналам от сигнализаторов 13-15 фактического положения передачи. Блок 7 содержит элементы И 16 и 17, связанные с входами 9 и 10 и выходами блока, и элемент 18 временной задержки переднего фронта, соединенный с элементами И и третьим входом 11 блока, связанным с вторым в блоке 12 элементом ИЛИ 19. Блок 8 управления средней позицией связан с фор.мирователем 2 своими первым, вторым и третьим входами 20-22, к которым подсоединены прямые входы соответственно первого, второго и третьего элементов 23-25 запрета, инверсные входы которых подсоединены соответственно к четвертому, пятому и шестому входам 26-28 блока 8, связанным с сигнализаторами 13-15. Четвертый элемент 29 запрета блока 8 связан прямым входом с первым элементом ИЛИ 30 и восьмым входом 31 блока, связанным с выходом блока 12. Выход элемента 29 запрета соединен с входом второго в блоке 8 элемента ИЛИ 32, выход которого связан с выходом блока 8, а остальные входы - с третьим элементом 25 запрета и элементом И 33, связанным с третьим и седьмым входами 22 и 34 блока 8, который соединен с ключом 35 выбора способа управления. Последний соединен также с четвертым входом 36 блока 12, к которому подключен второй в блоке- 12 элемент ИЛИ 19. Второй вход последнего соединен с выходом элемента 37 памяти, вход возбуждения которого связан с третьим входом 38 блока, связанным с сигнализатором 15 отключенного состояния передачи. Входы 39 и 40 блока 12 связаны с сигнализаторами 13 и 14 включенного состояния передачи и .к этим входам подсоединен первый в блоке 12 элемент ИЛИ 41, выход которого соединен с входом стирания возбуждения элемента 37 памяти. Система работает следующим образом. Пусть ключ 35 находится в положении А (автоматического реверса), тогда сигнал за ним равен «О. Пусть также формирователь 2 вырабатывает команду ПХ, сервомотор 6 и передача 3 также находятся в положении ПХ, тогда на выходе сигнализатора 13 сигнал равен «1, а сигнализатор 14 и 15 - «О. Вследствие этого сигнал на выходах элемента 37 памяти и, соответственно, на выходе блока 12 и остальных блоков будет также равен «О. Благодаря фиксаторам в командном органе 5 режим работы передачи сохраняется неограниченное время. Если командный орган 1 перекладывается сразу в положение ЗХ, то сигнал ПХ станет равным «О, сигнал С сохранится равным «О, а сигнал ЗХ станет равным «1. Поскольку передача еще остается в положении ПХ, то за сигнализаторами 13-15, а также на выходе блока 12 сохраняются прежние сигналы. На входе элемента 17 сигнал также сохраняется равным «О, и команда ЗХ из блока 7 управления крайними позициями к сервомотору 6 не проходит. На выходе блока 8 управления средней позицией сигнал станет равным «1, так как на входах элемента 23 имеется управляющий сигнал «1 и отсутствует блокирующий сигнал по положению передачи. Поэтому на его выходе появляется сигнал «1, который через элемент 30, открытый элемент 29 и элемент 32 проходит на выход блока к сервомотору 6, перекладывая его в положение С. В это же положение перекладывается командный орган 6, и передача 3 отключает двигатель 4 от гребного вала. Когда произойдет фактическое переключение передачи, из.менятся сигналы на выходе сигнализаторов 13 и 15: на выходе сигнализатора 13 сигнал станет равным «О, а на выходе сигнализатора 15 - «1. Элемент 37 памяти блока 12 перейдет в возбужденное состояние, его выходной сигнал станет равным «1, выходной сигнал блока 12 станет также равным «1 и элемент 23 закроется. Сигнал С к сервомотору 6 снимается. Сигнал «1 от блока 9 поступит также в блок 7 к элементу 18 задержки, и через некоторое время, определяемое настройкой элемента 18, на его выходе сигнал становится равным «1. В результате на обоих входах и выходе элемента 17 сигналы становятся равными «1, и к сервомотору 6 из блока 7 поступит сигнал на перекладку в положение ЗХ. Таким образом происходит автоматическое отключение от гребного вала и необходимая для стабилизации частоты вращени двигателя выдержка передачи в этом положении. Благодаря выдержке в отключенном положении обеспечивается повышение надежности работы двигателя.
После подачи команды ЗХ сервомотор 6 переместит командный орган 5, передача 3 включится на задний ход, и произойдет автоматическое последовательное переключение передачи 3 с соответствующим изменением сигналов за сигнализаторами 14 и 15. За сигнализатором 14 будет сигнал «1, а за сигнализатором 15 (так же как и за сигнализатором 13) - «О. Через элемент 41 сигнал «1 поступит к элементу 37 блока 12 и сотрет его возбуждение. Сигналы на его выходе и соответственно за элементом 18 блока 7 станут равными «О, а элемент 29 запрета блока 8 разблокируется. В результате система оказывается подготовленной к выполнению следующей команды. Благодаря тому, что память элемента 33 стирается только после того, как произощло фактическое включение передачи на ПХ и ЗХ, сигнал управления к сервомотору 6 поступает в течение всего цикла переключения передачи в заданное положение.
Переход из состояния ЗХ и ПХ происходит аналогично выщеописанному, только сигнал на установку сервомотора в состояние С вырабатывает элемент 24 блока 8.
Если из состояния ПХ или ЗХ требуется переход в С, то эта команда к сервомотору 6 поступает из блока 8 от элемента 25, и снова, благодаря сигнализатору 15 и элементам 33, 18, 16 и 17, гарантируются задержки передачи в состоянии С.
Если сигнализаторы 13-15 имеют инверсные выходы, то вместо элементов 23-25 запрета устанавливаются элементы И. Если сигналы к сервомотору 6 снимать не надо, инверсные входы элементов 23-25 к сигнализаторам 13-15 не подсоединяются.
Благодаря наличию только одного элемента памяти система упрощается и повышается ее надежность. Кроме того, благодаря тому, что вход возбуждения элемента 37 памяти соединен с сигнализатором 15, сохраняется возможность управления сервомотором даже в случае невключения муфты на ПХ и ЗХ. В этом случае элемент 37 остается возбужденным, обеспечивая условия срабатывания элементов 16 и 17. Если, например, муфта не включилась на ПХ, но выщла из положения С, то сохраняется возможность перекладки сервомотора с положения С и ЗХ и повторно ПХ. Аналогичным образом может быть повторена команда С.
Благодаря наличию ключа 35, элементов 19, 32 и 41 обеспечивается возможность управления передачи 3 при выходе из строя
0 сигнализаторов 13-15, элементов 23-25 и 29 блока 8.
Если ключ 35 находится в положении П (последовательное переключение муфты), на его выходе сигнал равен «1. Этим сигналом через элемент 19 блокируется элемент
29 блока 8 и обеспечивается условие срабатывания элементов И 16 и 17 блока 7 для формирования команд ПХ и ЗХ. Команда С сервомотора 6 в этом случае формируется элементом 33.
Q Система может быть выполнена на логических элементах любого типа.
В предлагаемой системе повышена надежность благодаря уменьшению количества элементов памяти с 3 до 1 и безопасность плавания судна благодаря тому, что
5 система всегда выполняет команду судоводителя, и последний может сделать повторные попытки включения (отключения) муфты, если она сразу не включилась (отключилась). В известной системе в аналогичном случае система самоблокируется в
положении невыполненной команды, последующие команды судоводителя не выполняются и судоводитель лишен возможности сделать повторные попытки включения (отключения) муфты.
Кроме того,повышена надежность управ5ления двигателем благодаря автоматической выдержке муфты в положении «Стоп- Винт заданное время; в известной системе такая выдержка отсутствует, муфта может быть сразу переложена из одного
0 включенного положения в противоположное, что может привести к аварии двигателя, В предлагаемой системе упрощен процесс управления двигателем, так как оператор может перекладывать командный орган произвольным образом, а система автоматически выполнит требуемый порядок переключения муфты; в известной системе оператор должен перекладывать командный орган строго определенным образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дистанционный привод управления главным судовым двигателем /варианты/ | 1983 |
|
SU1191357A1 |
| Устройство управления реверсом многодвигательной газотурбинной судовой установки с реверсивным редуктором | 1991 |
|
SU1830015A3 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU878993A2 |
| Устройство для управления автономной креновой системой | 1983 |
|
SU1094805A1 |
| Устройство для временного программного управления | 1985 |
|
SU1290259A1 |
| Устройство для автоматического управления адиабатной опреснительной установкой | 1990 |
|
SU1712244A1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1978 |
|
SU740969A1 |
| Устройство для управления переключением резерва | 1982 |
|
SU1037437A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
| Электронная система автоматического управления гидромеханической реверсивной передачей | 1990 |
|
SU1773750A1 |
1. СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ТРЕХПОЗИЦИОННОЙ ПЕРЕДАЧЕЙ, снабженной сигнализаторами фактического положения трехпозиционной передачи и органом управления последней с сервомотором, содержащая дистанционный командный орган и формирователь команд, отличающаяся тем, что, с целью повышения надежности, система снабжена блоком управления крайними позициями передачи, блоком управления средней позицией передачи, блоком формирования сигнала о позиции передачи и ключом выбора способа управления, причем выходы формирователя команд подключены к первому и второму входам блока управления крайними положениями передачи, к третьему входу которого подключен выход блока формирования сигнала о позиции передачи, а выходы последнего подключены к сервомотору, выход блока управления средней позицией передачи подключен к сервомотору, а его первый, второй и третий входы - к выходам формирователя команд, четвертый, пятый и шестой входы - к анализаторам фактического положения трехпозиционной передачи, седьмой вход - к ключу выбора способа управления, восьмой вход - к выходу блока формирования сигнала о позиции передачи, первый, второй и третий входы которого подсоединены к сигнализаторам фактического положения. а четвертый вход - к ключу выбора способа управления. 2.Система по п. 1, отличающаяся тем, что блок управления крайними позициями передачи снабжен элементами И, соединенными с его первым и вторым входами и его выходами, и элементом временной задержки, выход которого соединен с элементами И, а вход - с третьим входом блока. 3.Система по пп. 1 и 2, отличающаяся тем, что блок управления средней позицией передачи снабжен первым, вторым и третьим элементами запрета, пря.мые входы которых подключены к первому, второму и третьему входам блока, инверсные входы - к четвертому, пятому и шестому входам $3 блока, а также элементом И, соединенным СО с третьим и седьмым входами блока, первым элементом ИЛИ, входы которого соединены с первым и вторым элементами запрета, четвертым элементом запрета, прямой вход которого соединен с выходом первого элемента ИЛИ, а инверсный - с восьмым входом блока, и вторым элементом ИЛИ, выход которого соединен с выходом блока, а входы - с выходами третьего 00 и четвертого элементов запрета и элемента И. о ел 4.Система по пп. 1-3, отличающаяся тем, что блок формирования сигнала о пози ции передачи снабжен элементом памяти, 05 вход возбуждения которого соединен с третьим входом блока, первым элементом ИЛИ, входы которого соединены с первым и вторым входами блока, а выход - с входом стирания элемента памяти, и вторым элементом ИЛИ, выход которого соединен с выходом блока, а входы - с четвертым входом блока и выходом элемента памяти.
| Авторское свидетельство СССР № 761735, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
