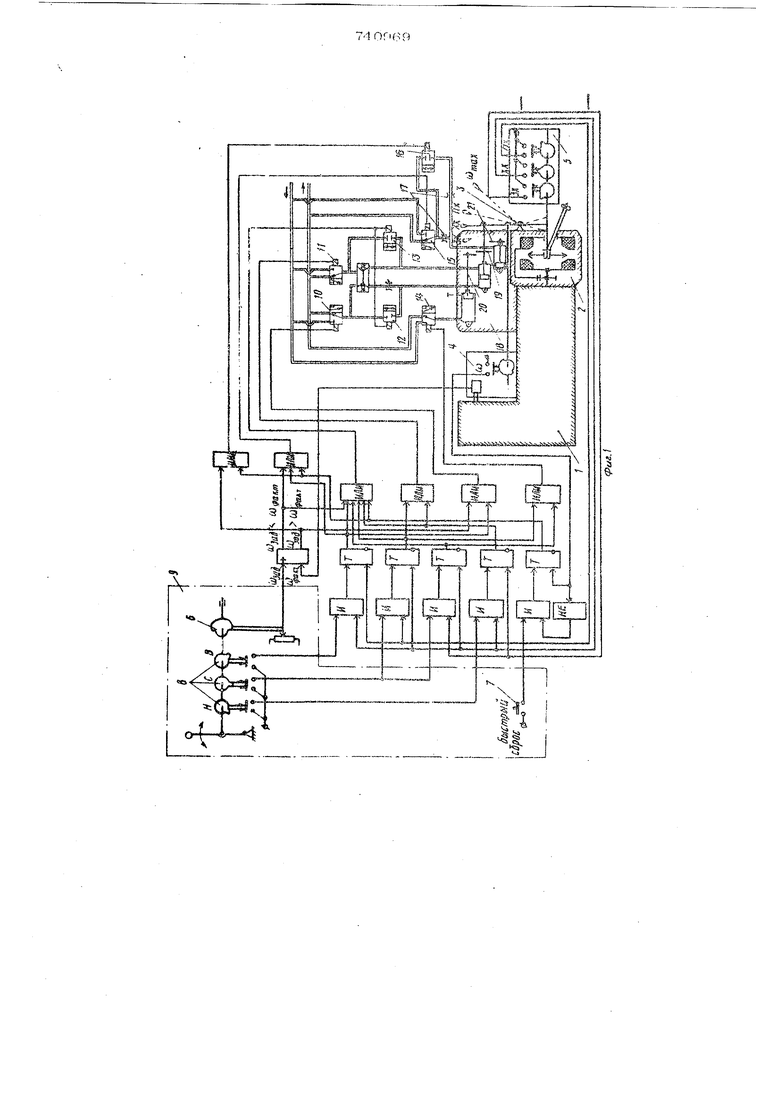
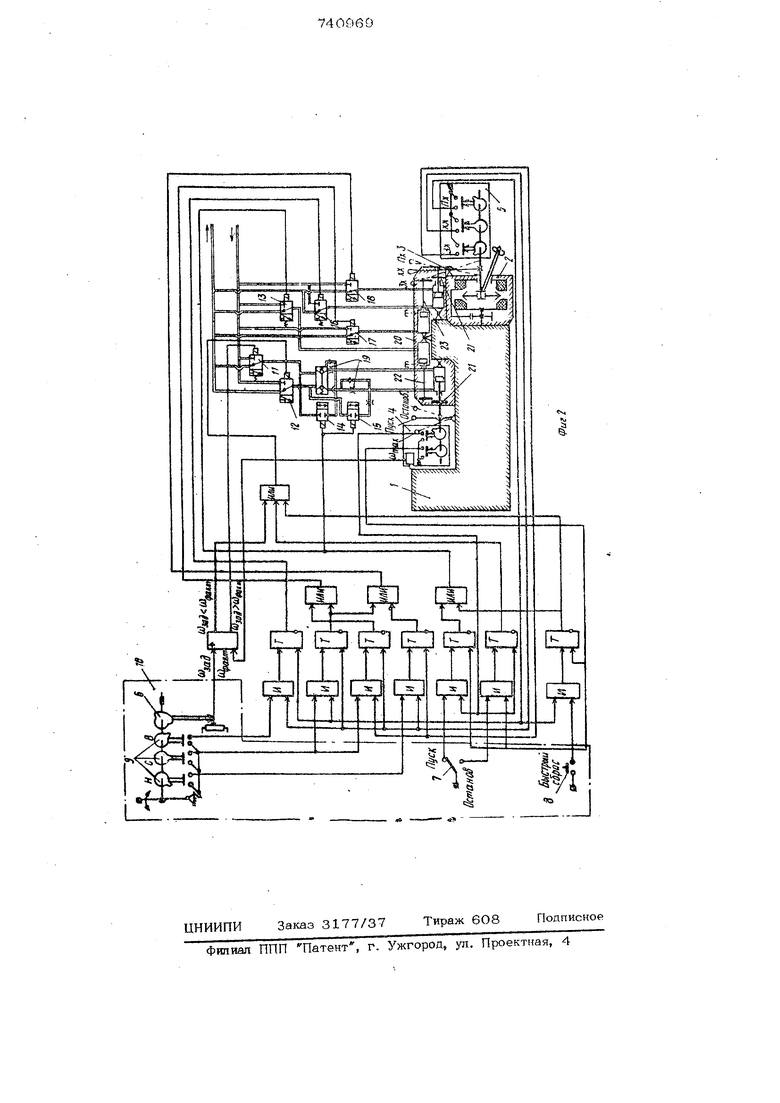
374 (на фиг. 2), подключенными при помощи пар иа посп.еяоватепьно соединенных логического элемента И и запоминающего устройства, число которых равно чиспу фиксированных режимов управления часто той вращения двигателя и числу режимов переключения передачи, и входы которых соединены с датчиком 4 режима работы двигателя и датчиком 5 положения раверс-редукторной передачи соответственно а также элемента сравнения в канале бес ступенчатого управления изменением частоты вращения двигателя, электромагнитных клапанов 1О, И, 12, 13, 14, 15, 16 (на фиг. 1) или 11, 12, 13, 14, 15 16, 17, 18 (на фиг. 2) и гидравлических дросселей 17 (на фиг. 1) или 19 (на фиг. 2) к блоку 18 сервомеханизмов (на фиг. 1) или 2О (на фиг. 2). Блок сервомеханизмов снабжен фиксатором 19 положений (на фиг. 1) или 21 (на фиг.. 2), взаимодействующим со стопором, выполненным в виде по крайней мере двух подвижных упоров 2О, 21 (на фиг. 1) или 22, 23 (на фиг. 2). Работу системы дистанционного управления рассмотрим по структурной схеме, приведенной, например, на фиг. 1. За исходное положение рукоятки местного поста примем ее нахождение в положении Холостой ход (ХХ). При установке органа 8 управления реверс-редукторной передачей дистанционного поста 9 в положение Назад (Н) перемещение рукоятки местного поста в положение Задний ход (ЗХ) происходит с помощью электромагнитных клапанов ll 12 и 13 и привода сервомеханизма с фиксатором 19 влево (см. фиг. 1) до упо ра поршня в дно серводилиндрао Снятие управляющего сигнала с электромагнитных клапанов 11, 12 и 13 происходит после переключения реверс-редукторной передачи иа ЗХ путем подачи сигнала от датчика 5 ЗХ положения передачи на вход сброса соответствующего запоминающего устройства. При установке органа 8 дистанционног постй 9 в положение Стоп (с) перемещение рукоятки местного поста в положение XX происходит с помощью электромагнитных клапанов 14, 12 и 13 и пере вода подвижного упора 20, взаимодейст вуюшего с фиксатором 19, вправо (см. фиг. 1) до упора в дно сервоиилиндра упора. Снятие управляющего сигнала с электромагнитных клапанов 14, 12 и 13 про9ИСХОДИТ после переключения реверс-редук торной передачи на XX путем подачи сиг нала от датчика 5 XX положения передачи на вход сброса соответствующего запоминающего устройства. При установке органа 8 дистанционного поста 9 в положение Вперед (В) перемещение рукоятки местного поста в положение Передний ход (ПХ) происходит с помощью электромагнитных клапанов 10, 12 и 13 и перевода сервомеханизма с фиксатором 19 вправо (см. фиг, 1) до упора фиксатора 1Э в подвижный упор 21 фиксация которого осуществляется с помощью электромагнитного клапана 15. Снятие управляющего сигнала с электромагнитных клапанов Ю, 12, 13 и 15 Происходит после переключения реверсредукторной передачи на ПХ путем подачи сигнала от датчика 5 ПХ положения передачи на, вход сброса соответствующего запоминающего устройства. Бесступенчатое управление изменением частоты вращения двигателя 1 осуществляется с помощью элемента сравнения путем сравнения заданного режима от органа 6 управления частотой вращения и фактического режима от датчика 4 режима работы двигателя воздействием с помощью электромагнитных клапанов 10 и 16 (при необходимости увеличения частоты вращения) или 15, 12 и 13 (при необходимости уменьшения частоты вращения) и гидравлических дросселей 17 на сервомеханизм с фиксатором 19 или подвижный упор 21 соответственно до упора в дно сервоцигатедра. Экстренное уменьшение частоты вращения двигателя Быстрый сброс осуществляется воздействием органа 7- с помощью электромагнитных клапанов 15, 16, 12 и 13 и гидравлического дросселя 17 на подвижный упор 21, Работа системы, структурная схема которой приведена на фиг. 2, происходит аналогично, но с раздельным воздействием на отдельные органы управления местного поста. ,, Применение однотипных сервоцилиндров для сервомеханизма привода рукояток местного поста и для подвижных упоров упрощает конструкцию, повышает надежность системы и исключает возможность проскока фиксированных за счет жесткой установки подвижных упоров в заданные положения и за счет упора поршней в дно сервоцилиндров. Формула р 6 т в н и я 1, Система дистанционного управлений двнгатепо л с реверо-редукторной передачей, например, эпектрогидравпичесдаа, 00держащая местный пост с рычагом управления в дистанционный пост управления, снабженный командными органами управП8НЯЯ1 частотой вращения двигателя и ре верс-редук1 орной, передачей и подключенный при .помощи логической схемы, снаб.жённой датчикга/ш режима работы двигателя и положения реверс-редукторной передачи и электромагнитными клапанамщ к ёлоку сервомеханизмов, кинематически связанному с местным постом управления и снабженному фиксатором и стопорами рычага управления, отличающая7406 с я тем, что, с целью повышения надежности, стопоры рычага управления выполнены в виде подвижных упоров, и подключены через электромагнитные клапаны к командным органам дистанционного поста управления, а фиксатор выполнен в виде траверсы, расположенной между подвижнь ми упорами и связанной с выходным што КОМ блока сервомеханизмов. 2. Система по п. 1, отличающаяся тем, что подвижные упоры выполнены в виде сервошшвндров фойного действия, у каждого из которых одна из полостей снабжена дренажным отверстием №;точники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 381800, кл, F 02 D 27/00, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU878993A2 |
| Дистанционный привод управления главным судовым двигателем /варианты/ | 1983 |
|
SU1191357A1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU883539A2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1975 |
|
SU699218A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ПЕРЕДАЧЕЙ | 2003 |
|
RU2262609C2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1980 |
|
SU960457A2 |
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| Система дистанционного и автоматического управления двигателем внутреннего сгорания | 1982 |
|
SU1059237A1 |
| Устройство для дистанционного управления многомашинным агрегатом | 1978 |
|
SU748348A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |