Изобретение относится к средствам автоматического управления трансмиссией транспортных средств, имеющих одинаковое число ступеней для движения передним и задним ходом, в частности гидромеханической передачей автопогрузчика.
Известны электронные системы автоматического управления гидромеханическими передачами автомобилей (см. патенты США № 3640152, кл, 74-866, № 3641844, кл. 74-752, № 3700079 кл. 192-4А. № 3710648, кл. 74-731, № 3713331, кл. 74-645). Отличительными признаками устройств такого рода является использование в качестве основных параметров управления передаточного отношения гидротрансформатора.
Недостатком этих систем является отсутствие элементов, обеспечивающих необходимую плавность при переключениях между ступенями и при изменении направления движения, а также коррекцию моментов переключения по условию топливной экономичности при изменении направления движения с учетом различных передаточных чисел ступеней переднего и заднего хода.
Из известных систем автоматического управления гидромеханической передачей наиболее близким к предлагаемому является электронная система автоматического управления двухступенчатой гидропередачей 1. Эта система содержит бесконтактные индукционные датчики частот вращения насосного и турбинного колес
4 VI
СА) СЛ
О
гидротрансформатора, выходы которых соединены через частотно-аналоговые преобразователи с входами блоков сравнения, выходы которых подключены к логическим элементам контроля условий переключения, триггера управления электромагнитом переключения передач.
Известная электронная система не обеспечивает необходимую плавность переключения, в связи с чем снижается комфортабельность движения и возможно возникновение пиковых динамических нагрузок, отрицательно сказывающихся на долговечности двигателя и элементов трансмиссии. Кроме того, известная система не предусматривает возможность переключения ступеней при движении задним ходом, а также соответствующей корректи- ро вки моментов переключения вследствие изменения передаточных чисел в трансмиссии при движении задним ходом, что отрицательно сказывается на топливно-ско- ростных свойствах.
Целью изобретения является расширение функциональных возможностей, улучшение плавности переключений, в том числе при изменении направления движения, а также улучшение топливно-скоро- стных свойств транспортного средства за счет совершенствования выбора моментов переключения.
Поставленная цель достигается тем, что электронная система автоматического управления гидромеханической реверсивной передачей, содержащая датчики частот вращения насосного и турбинного колес гид- ротрансформатора, выходы которых соединены через частотно-аналоговые преобразователи с входами блоков сравнения, выходы которых соединены с логическими элементами контроля условий переключения триггера управления электромагнитом переключения ступеней, согласно изобретению снабжена раздельными электромагнитными клапанами переключения каждой ступени, устройством переключения на- праЁления движения, четырьмя линиями задержки и четырьмя триггерами, что дает возможность осуществлять синхронизацию сигналов во времени, обеспечивающих получение перекрытия переключаемых фрикционов, исключающего резкие рывки при переключениях между ступенями и при изменении направления движения. Кроме того, для получения различных моментов переключения ступеней при движении передним или задним ходом предусмот- . рены два блока коррекции моментов переключения, изменяющие настройку блоков сравнения.
Аналоги, содержащие отличительные признаки предлагаемого технического решения, не обнаружены, поэтому данное решение соответствует критерию существенные отличия.
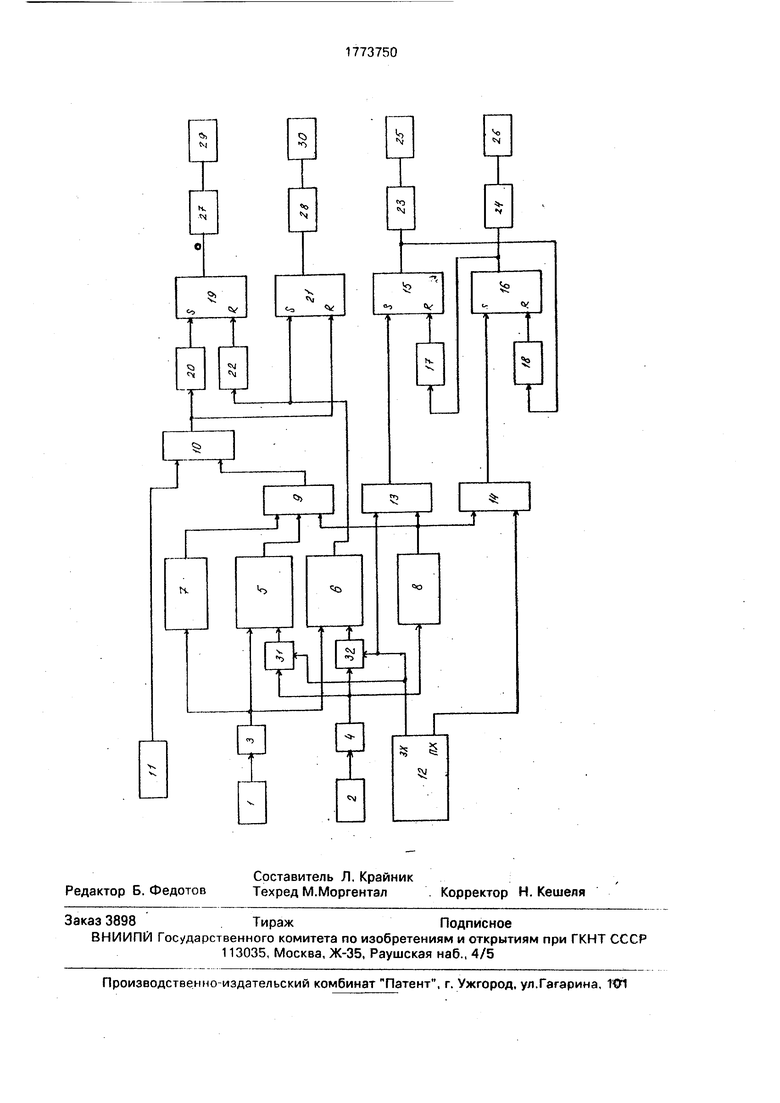
На чертеже изображена структурная схема электронной системы автоматического управления гидромеханической реверсивной передачей.
0 Электронная система автоматического управления гидромеханической реверсивной передачей содержит датчик 1 частоты вращения насосного и датчик 2 частоты вращения турбинного колес гидро5 трансформатора, выходы которых через соответствующие частотно-аналоговые преобразователи 3 и 4 соединены с входами блоков 5 и 6 сравнения, реагирующих на определенные соотношения сигналов вхо0 да, и блоков 7 и 8 сравнения, реагирующих на определенные уровни сигналов входа. Выходы блоков 5, 7 и 8 связаны с входами схемы И 9, выход которой в свою очередь подключен к входу схемы ИЛИ 10, другой
5 вход которой соединен с датчиком 11 микроскорости. Выходы ПХ и ЗХ селектора
12выбора режима движения через схемы И
13и 14 подключены к S - входам соответственно триггеров 15 и 16, R-входы кото0 рых соединены с выходами линий 17 и 18 задержки. S-вход триггера 19 через линию 20 задержки и R-вход триггера 21 непосредственно связаны с выходом схемы ИЛИ 10, R-вход триггера 19 через линию 22 задержки
5 и S-вход триггера 21 непосредственно связаны с выходом блока 6 сравнения. Выходы триггеров 15 и 16 через блоки 23 и 24 усилия соединены с электромагнитными клапанами 25 и 26 переключения заднего и передне0 го хода, выходы триггеров 19 и 21 через блоки 27 и 28 усиления соединены с электромагнитными клапанами 29 и 30 переключения первой и второй передач.
Для обеспечения различных моментов
5 переключения при движениях передним
или задним ходом предусмотрены блоки 31
и 32 коррекции моментов переключения,
Система работает следующим образом.
Выбор режима движения автопогрузчи0 ка осуществляется селектором 12, предусматривающего положения:
ПХ - движение вперед с автоматическим переключением между первой и второй передачами;
5 ЗХ - движение назад с автоматическим переключением между первой и второй передачами:
При переводе селектора 12 в положение ПХ на вход схемы И 14 подается сигнал высокого уровня и при наличии на другом
входе разрешающего сигнала от блока 8 сравнения схема И 14 вырабатывает сигнал, который устанавливает триггер 16 в верхнее устойчивое состояние. Команда на включение переднего хода с выхода триггера 16 после усиления в блоке 24 усиления подается на обмотку электромагнитного клапана
26переключения переднего хода.
Определение оптимальных моментов переключения с первой на вторую передачи и с второй на первую осуществляется соответственно блоками 6 и 5 сравнения. Блоки 7 и 8 сравнения срабатывают, когда уровни сигналов на их входах ниже некоторого определенного значения. Блок 7 формирует сигнал, если обороты двигателя, определяемые датчиком 1, ниже некоторого допустимого значения. Блок 8 формирует сигнал если скорость движения, определяемая по сигналам датчика 2, ниже некоторого граничного значения, обеспечивающего работу элементов трансмиссии и двигателя на допустимых режимах работы.
Таким образом, в начальный период трогания с места значения параметров управления находятся в рабочих границах блоков 5, 7 и 8 сравнения, которые формируют на своих выходах сигналы высокого уровня, подаваемые на входы схемы И 9.
Сигнал высокого уровня на выходе схемы И 9 через схему ИЛИ 10 и линию 20 задержки устанавливает триггер 19 в верхнее устойчивое состояние, соответствующее включению электромагнитного клапана 29 переключения первой передачи. Одновременно данный сигнал дублирует на выходе схемы ИЛИ 10 дополнительно команду выключения второй передачи переводом триггера 21 в нижнее устойчивое состояние, Команда на включение первой передачи с выхода триггера 19 после усиления в блоке
27подается на обмотку электромагнитного клапана 29.
По мере разгона автопогрузчика происходит увеличение передаточного отношения гидротрансформатора и по достижении им значения, соответствующего моменту оптимального переключения на вторую передачу, происходит срабатывание блока 6 сравнения. Сигнал высокого уровня на выходе блока б переводит триггер 21 в верхнее устойчивое состояние, соответствующее подаче тока с выхода блока 28 усиления в обмотку электромагнитного клапана 30 переключения второй передачи. При этом на протяжении определенного промежутка времени, задаваемого линией 22 задержки, остается включенным фрикцион предыдущей первой передачи, чем обеспечивается необходимое перекрытие переключаемых фрикционов во времени и неразрывность передачи силового потока. По истечении заданного времени линия 22 задержки пропускает сигнал высо- кого уровня с выхода блока б и таким образом переводит триггер 19 в нижнее устойчивое состояние, при котором обесточивается обмотка электромагнитного клапана 30.
0 Аналогично о наступлении момента обратного переключения с второй на первую передачу свидетельствует падение передаточного отношения гидротрансформатора, оборотов двигателя и скорости движения,
5 соответствующих срабатыванию блоков 5, 7 и 8 сравнения. Соответственно сигнал высокого уровня с выхода элемента ИЛИ 10 изначально переводит триггер 21 в нижнее устойчивое состояние, а потом по истечении
0 времени запаздывания, задаваемого линией 20 задержки, переводит триггер 19 в верхнее устойчивое состояние. Т.е. сначала подается команда выключения второй передачи, а затем по истечении времени запаз5 дывания начинается процесс включения фрикциона первой передачи. Такая организация процесса переключения с опережающим выключением фрикциона предыдущей передачи и последующей кратковременной
0 разгрузкой двигателя обуславливается необходимостью его быстрого разгона при переключении на низшую передачу и более полного использования мощностных показателей.
5При движении на режиме микроскорости осуществляется принудительное включение первой ступени. Сигнал об этом от датчика 11 микроскорости через схему ИЛИ 10 переводит триггер 19 в верхнее устойчи0 вое состояние на время действия режима микроскорости.
Управление переключением передач при движении задним ходом происходит аналогично движению передним ходом.
5 При переводе селектора 12 в положение ЗХ на вход схемы И 13 подается сигнал высокого уровня и при наличии на другом входе разрешающего сигнала от блока 8 сравнения схема И 13 формирует сигнал,
0 который устанавливает триггер 15 в верхнее устойчивое состояние. Команда на включение заднего хода с выхода триггера 15 после усиления в блоке 23 подается на обмотку электромагнитного клапана 25 переключе5 ния заднего хода. Для получения оптимальных моментов переключения при движении задним ходом, отличных от моментов при движении передним ходом, осуществляется автоматическая подстройка блоков 5 и 6 сравнения с помощью блоков
31 и 32 коррекции моментов переключения по сигналу с выхода ЗХ селектора 12.
Для обеспечения плавности переключений фрикционов I при изменении направления движения предусмотрены линии 17 и 18 задержки. При смене положения селектора с ПХ на ЗХ, с последующим включением фрикциона заднего хода, на протяжении определенного промежутка времени, задаваемого линией задержки 18, остается включенным фрикцион переднего хода, чем обеспечивается необходимое перекрытие переключаемых фрикционов во времени. По истечении задержки триггер 16 переводится в нижнее устойчивое состояние, при котором обесточивается обмотка электромагнитного клапана 26 переключения переднего хода. Аналогично при смене положения селектора 12 с ЗХ на ПХ и при наличии низкой скорости движения, определяемой блоком 8, осуществляется плавный переход с движения задним ходом на движение передним ходом с перекрытием переключаемых фрикционов во времени, только в этом случае задержку выключения заднего хода по отношению к включению переднего хода осуществляет линия 17 задержки,
В предлагаемой электронной системе автоматического управления гидромеханической реверсивной передачей за счет применения элементов, обеспечивающих необходимую плавность переключений между передачами и при изменении направления движения, улучшается комфортабельность движения, исключается возникновение пиковых динамических нагрузок, что влечет за собой увеличение долговечности двигателя и элементов трансмиссии и улучшает топливно-скоростные свойства и технико-экономическую эффективность использования автопогрузчиков, оборудованных гидропередачей.
Формула изобретения
Электронная система автоматического управления гидромеханической реверсивной передачей, содержащая датчики частот вращения насосного и турбинного колес гидротрансформатора, выходы которых соединены через частотно-аналоговые преобразователи с входами блоков сравнения, выходы которых соединены с логическими
элементами контроля условий переключения триггера управления электромагнитом переключения ступеней, отличаю щая- с я тем, что, с целью улучшения плавности
при переключениях между ступенями и при изменении направления движения, она снабжена датчиком микроскорости, селектором выбора режима движения, двумя блоками коррекции моментов переключения,
четырьмя триггерами, четырьмя усилителями, четырьмя линиями задержки, устройством переключения направления движения и устройством переключения ступеней, которое включает в себя электромагнитный клапан переключения первой ступени и электромагнитный клапан переключения второй ступени, причем вход первого из них через блок усиления подключен к выходу первого триггера, а вход второго через другой блок усиления - к выходу второго триггера, при этом S-вход первого триггера через первую линию задержки, а R-вход второго триггера непосредственно соединены с выходом схемы ИЛИ, первый вход которой
подключен к датчику микроскорости, а второй вход через первую схему И - к выходу первого блока сравнения, выход второго блока сравн jHHfl через вторую линию задержки и непосредственно соединен, соответственно с R-входом первого триггера и S-входом второго триггера, устройство переключения направления движения включает в себя электромагнитный клапан переключения заднего хода и электромагнитный
клапан переключения переднего хода, причем вход первого из них через третий блок усиления подключен к выходу третьего триггера, а вход второго через четвертый блок усиления - к выходу четвертого триггера,
при этом S-входы третьего и четвертого триггеров через соответствующие схемы И соединены соответственно с выходами ЗХ и ПХ селектора выбора режима движения, R-вход третьего триггера через третью линию задержки подключен к выходу четвертого триггера, R-вход четвертого триггера через четвертую линию задержки подключен к выходу третьего триггера, причем выход ЗХ селектора выбора режима
движения через блоки коррекции моментов переключения соединен с одним из входов первого и второго блоков сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления гидромеханической передачей транспортного средства | 1986 |
|
SU1310252A1 |
| Система автоматического управления гидромеханической передачей транспортного средства | 1987 |
|
SU1495155A1 |
| Способ управления автоматической коробкой передач | 2019 |
|
RU2712725C1 |
| Система автоматического управления гидромеханической передачей транспортного средства | 1988 |
|
SU1546301A1 |
| Гидромеханическая трансмиссия транспортного средства | 1976 |
|
SU653148A1 |
| Система управления гидромеханической коробкой передач транспортного средства | 1990 |
|
SU1781097A1 |
| Гидромеханическая передача | 1987 |
|
SU1459952A1 |
| Электронная система автоматического управления трехступенчатой гидромеханической передачей | 1988 |
|
SU1530499A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2226160C2 |
| Система управления гидромеханической многоступенчатой передачей | 1987 |
|
SU1437257A1 |
Использование: к средствам автоматического управления гидромеханическими передачами, имеющими одинаковое число передач для движения передним и задним ходом, в частности автопогрузчиков. Цель изобретения - улучшение плавности при переключениях. Сущность: система содержит два бесконтактных датчика частоты вращения насосного и турбинного колес гидротрансформатора, выходы которых связаны с блоками сравнения, определяющих моменты переключения передач, дополнительно имеет устройство переключения направления движения, раздельные электромагнитные клапаны переключения каждой передачи и четыре линии задержки синхронизации сигналов управления триггерами включения электромагнитных клапанов фрикционов, что обеспечивает перекрытие или разрыв во времени передачи силового потока при переключениях, а также корректировку моментов переключения в зависимости от направления движения. 1 ил. со С
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3640152, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
