с целью повышения точности и срока эксплуатации привода, управляемые подвижные упоры выполнены в виде подпружиненных гидроцилиндров одностороннего действия, одна из полостей каждого из которь х сообщена с соответствующим электрогидравлическим преобразователем, и каждый из этих упоров снабжен взаимодействующими с ним датчиками отведенного и фиксирующего положений соответствующего стопора, который электрически связан с согласующим блоком, а каждый электрогидравлический преобразователь на выходе снабжен гидравлическим сопротивлением.
4.Дистанционный привод управления главным судовым двигателем, содержащий реверс-редукторную передачу, местный пост с рукояткой бесступенчатого изменения частоты вращения в зоне переднего хода и дискретного реверса в зоне переключения реверс-редукторной передачи, кинематически связанной с гидравлическим сервоприводом, снабженным датчиками положений рукоятки в зоне переключения реверс-редукторной передачи, при этом датчик положения «Передний ход выполнен с двумя фиксаторами границы зон перемещения рукоятки и фиксатором, выполненным совместно с управляемым гидромеханическим тормозом и кулачковым механизмом, взаимодействующим со стопорами дискретного положения рукоятки, которые выполнены с управляемыми подвижными упорами, дистанционный пост управления со световыми сигнализаторами положения рукоятки и командными органами, соединенный последовательно с координатором управляющих воздействий и согласующим блоком, электрически соединенным со всеми датчиками положений рукоятки и посредством электрогидравлических преобразователей - с гидравлическим сервоприводом с двумя фиксаторами границ зон перемещения рукоятки датчика ее положения «Передний ход, отличающийся тем, что, с целью повыщения точности и срока эксплуатации привода, линия связи согласующего блока с электрогидравлическими преобразователями выполнена с временным дискриминатором нулевого сигнала, а подвижные упоры выполнены в виде гидроцилиндров двойного действия, обе полости каждого из которых попарно сообцдены с электрогидравлическими преобразователями перекрестно.
5.Привод по п. 4, отличающийся тем, что каждый из упоров снабжен взаимодействующим с ним датчиком отведенного положения соответствующего стопора, который электрически связан с согласующим блоком.
6.Дистанционный привод управления главным судовым двигателем, содержащий реверс-редукторную передачу, местный ноет с рукояткой бесступенчатого изменения частоты вращения в зоне переднего хода и дискретного реверса в зоне переключения реверс-редукторной передачи, кинематически связанной с гидравлическим сервоприводом, снабженным датчиками положений рукоятки в зоне переключения реверс-редукторной передачи, при этом датчик положения «Передний ход выполнен с двумя фиксаторами границы зон леремещения рукоятки и фиксатором, выполненным совместно с управляемым гидромеханическим тормозом и кулачковым механизмом, взаимодействующим со стопорами дискретного положения рукоятки, которые выполнены с управляемыми подвижными упорами, дистанционный пост управления со световыми сигнализаторами положения рукоятки и командными органами, соединенный последовательно с координатором управляющих воздействий и согласующим блоком, электрически соединенным со всеми датчиками положений рукоятки и посредством электрогидравлических преобразователей - с гидравлическим сервоприводом с двумя фиксаторами границ зон перемещения рукоятки датчика ее положения «Передний ход, отличающийся тем, что, с целью повыщения точности и срока эксплуатации привода, подвижные упоры выпоотнены Б виде гидроцилиндров двойного действия, обе полости каждого из которых попарно сообщены с электрогидравлическими преобразователями перекрестно, а каждый из этих упоров снабжен взаимодействующими с ним датчиками отведенного и фиксирующего положения соответствующего стопора, который электрически связан с согласующим блоком, а электрогидравлические преобразователи на выходе снабжены гидравлическими сопротивлениями.
7.Привод по пп. 1, 2, 4, 5, отличающийся тем, что согласующий блок содержит временной дискриминатор единичного сигнала, и пары последовательно соединенных логического элемента И и запоминающего устройства, причем число пар равно су.ммарному числу режимов переключения реверсредукторной передачи и режимов перехода рукояткой местного поста границы зон ее перемещения, входы упомянутых пар последовательно соединены с датчиками положений рукоятки, а выходы подключены параллельно к электрогидравлическим преобразователям и к временному дискриминатору единичного сигнала, выход которого связан с электрогидравлическими преобразователями.
8.Привод по п. 7, отличающийся тем, что временной дискриминатор единичного сигнала выполнен с последовательно соединенными элементами задержки на срабатывание и с двумя парами параллельно соединенных одним входом логических элементов И, второй вход каждого из которых связан с выходами соответствующих пар согласующего блока, при этом выходты одной пары
элементов И временного дискриминатора единичного сигнала прямо соединены с электрогидравлическими преобразователями, а выходы другой пары элементов И временного дискриминатора единичного сигнала - через временной дискриминатор нулевого сигнала.
9. Привод по пп. 7, 8, отличающийся тем, что координатор управляющих воздействий выполнен с блоком приоритета и подключенным параллельно к его выходу блоком фиксации управляющих воздействий и блоком переключения на границе зон перемещения рукоятки местного поста, при этом блок приоритета выполнен с двумя логическими элементами И, прямой вход каждого из которых соединен с соответствующим командным органом дистанционного поста, а инверсный вход - с выходом другого элемента И блока приоритета, причем блок фик сации управляющих воздействий выполнен с последовательно установленными логическими элементами И с прямыми и инверсными входами запоминающего устройства и двумя выходными логическими элементами, которые параллельно соединены друг с другом на одном из их входов, другой вход каждого из этих выходных логических элементов И подключен к соответствующему входу одного из последовательно установленных логических элементов И и соединен с выходом блока приоритета, при этом входы запоминающего устройства соединены с входом временного дискриминатора единичного сигнала согласующего блока, а блок переключения на границе зон перемещения рукоятки местного поста выполнен с последовательно установленными запоминающими устройствами и двумя параллельно соединенными между собой одним из входов выходными логическими элементами И, другой вход каждого из которых подключен к выходу блока приоритета, при этом входы
последовательно установленных запоминающих устройств соединены с выходами логических элементов И, входящих в пары согласующего блока, который прямо соединен с электрогидравлическими преобразователями.
10.Привод по пп. 1-9, отличающийся тем, что временной дискриминатор нулевого сигнала выполнен с входным логическим элементом И, последовательно установленными логическими элементами И. элементом задержки на отпускание и двумя параллельно соединенными на входах сброса запоминающими устройствами, входы записи которых соединены с инверсным входом входного логического элемента И и подключены к соответствующим входам временного дискри минатора нулевого сигнала.
11.Привод по пп. 7-10, отличающийся тем, что каждый из датчиков отведенного положения стопоров снабжен логическим элементом И, второй вход которого соединен с одним из электрогидравлических преобразователей упором, которым снабжен дистанционный привод, а выходы всех элементов И этих датчиков объединены и подключены параллельно выходу элемента задержки временного дискриминатора единичного сигнала согласующего блока.
12.Привод по нп. 3 и 6, отличающийся тем, что датчики фиксирующего положения стопоров соединены с согласующим блоком через комбинационный блок, который выполнен с последовательно установленными логическими элементами И, входы каждого из которых подключены к датчикам фиксирующего положения этих стопоров, и двумя параллельно соединенными на входе сброса запоминающими устройствами, входы записи которых подключены к выходам каждого из двух последовательно соединенных эле.ментов П пар согласующего блока, а выходы связаны с электрогидравлическими преобразователями.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления исполнительным механизмом | 1981 |
|
SU1044547A1 |
| Дистанционный привод исполнительного устройства реверса и изменения частоты вращения главного судового двигателя с однорукояточным постом управления | 1981 |
|
SU982970A1 |
| Система дистанционного и автоматического управления двигателем внутреннего сгорания | 1982 |
|
SU1059237A1 |
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU878993A2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU883539A2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1980 |
|
SU960457A2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ПЕРЕДАЧЕЙ | 2003 |
|
RU2262609C2 |
| Автоматическая система управления силовой установкой | 1983 |
|
SU1149044A1 |
| Автоматическая и дистанционная система для управления судовым двигателем внутреннего сгорания | 1982 |
|
SU1078116A1 |
1. Дистанционный нривод унравления главным судовым двигателем, содержащий реверс-редукторную передачу, местный ноет с рукояткой бесступенчатого изменения частоты вращения в зоне переднего хода и дискретного реверса в зоне переключения реверс-редукторной передачи, кинематически связанной с гидравлическим сервоприводом, снабженным датчиками положений рукоятки в зоне переключения реверс-редукторной передачи, при этом датчик положения «Передний ход выполнен с двумя фиксаторами границы зон перемещения рукоятки и фиксатором, выполненным совместно с управляемым гидромеханическим тормозом и кулачковым механизмом, взаимодействуюищм со стопорами дискретного положения упомянутой рукоятки, которые выполнены с управляемыми подвижными упорами, дистанционный пост управления со световыми сигнализаторами положения рукоятки и командными органами, соединенный последовательно с координатором управляющих воздействий и согласующим блоко.м, электрически соединенным со всеми датчиками положений рукоятки и посредством электрогидравлических преобразователей - с гидравлическим сервоприводом с двумя фиксаторами границ зон пере.мещения рукоятки датчика ее положения «Передний ход, отличающийся тем, что, с целью повыщения точности и срока эксплуатации привода, линия связи согласующего блока с электрогидравлическими преобразователями выполнена с временным дискриминатором нулевого сигнала, а управляемые подвижные упоры выполнены в виде подпружиненных гидроцилиндров одностороннего действия, одна из полостей каждого из которых сообщена с соответствующим электрогидравлическим преобразователем. 2.Привод по п. 1, отличающийся тем, что каждый подвижный упор снабжен взаимодействующим с ним датчиком отведенного положения соответствующего стопора, который электрически связан с согласующим блоком. 3.Дистанционный привод управления главным судовым двигателем, содержащий S реверс-редукторную передачу, местный пост с рукояткой бесступенчатого изменения час(Л тоты вращения в зоне переднего хода и дискретного реверса в зоне переключения реверс-редукторной передачи, кинематически связанной с гидравлическим сервоприводом, снабженным датчиками положения рукоятки в зоне переключения реверс-редукторной передачи, ири этом датчик положения «Передний ход выполнен с двумя фиксаторами границы зон перемещения рукоятки и фиксо сатором, выполненным совместно с управляемым гидромеханическим т .ормозом и кусо ел лачковым .механизмом, взаимодействующим со стопорами дискретного положения рукоятки, которые выполнены с управляемыми подвижными упорами, дистанционный пост управления со световыми сигнализаторами ноложения рукоятки и командными органами, соединенный последовательно с координатором управляющих воздействий и согласуюишм блоком, электрически соединенным со всеми датчиками положений рукоятки и посредством электрогидравлических преобразователей - с гидравлическим сервоприводом с двумя фиксаторами границ зон перемещения рукоятки датчика ее положения «Передний ход, отличающийся тем, что.
1
Изобретение относится к судостроению, в частности к устройствам дистанционного привода управления главным судовым двигателем с реверс-редукторными передачами.
Цель изобретения - повыщение точности и срока эксплуатации привода.
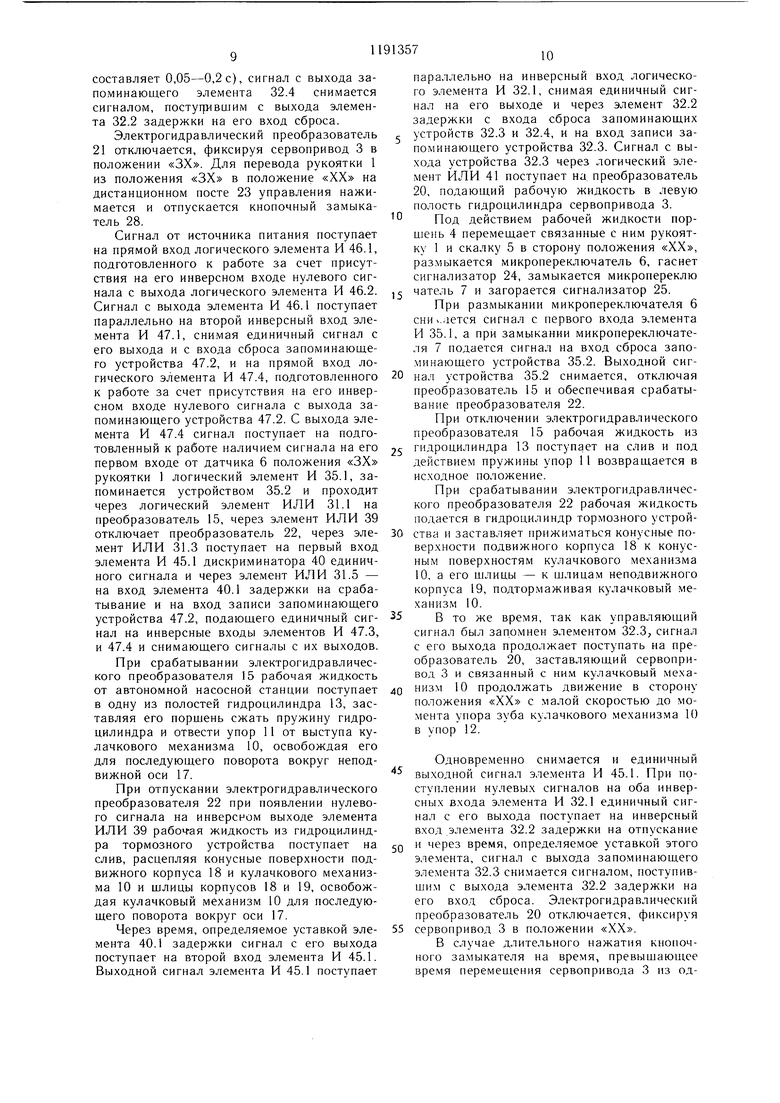
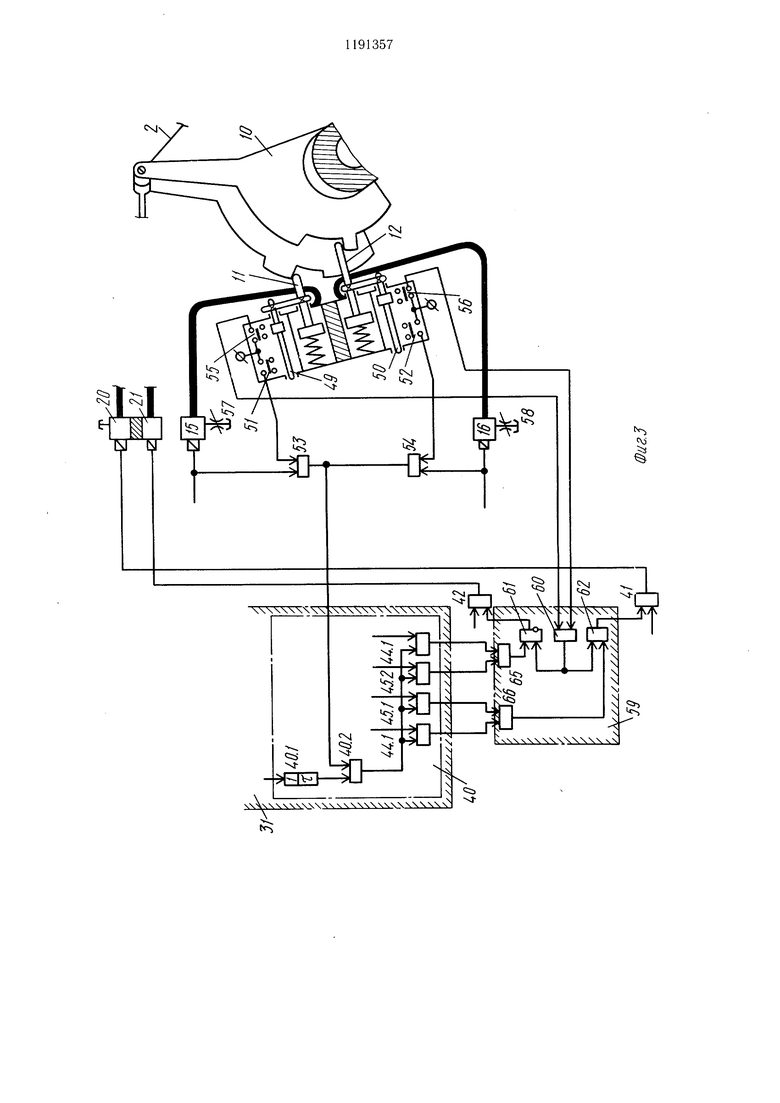
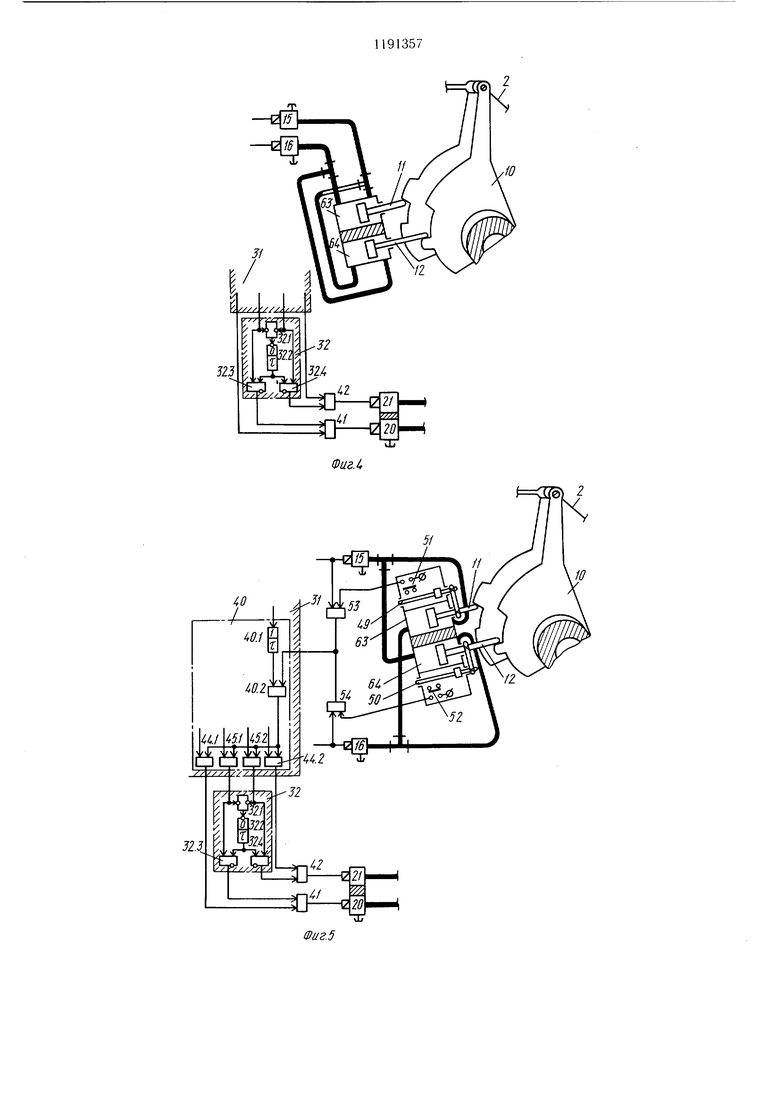
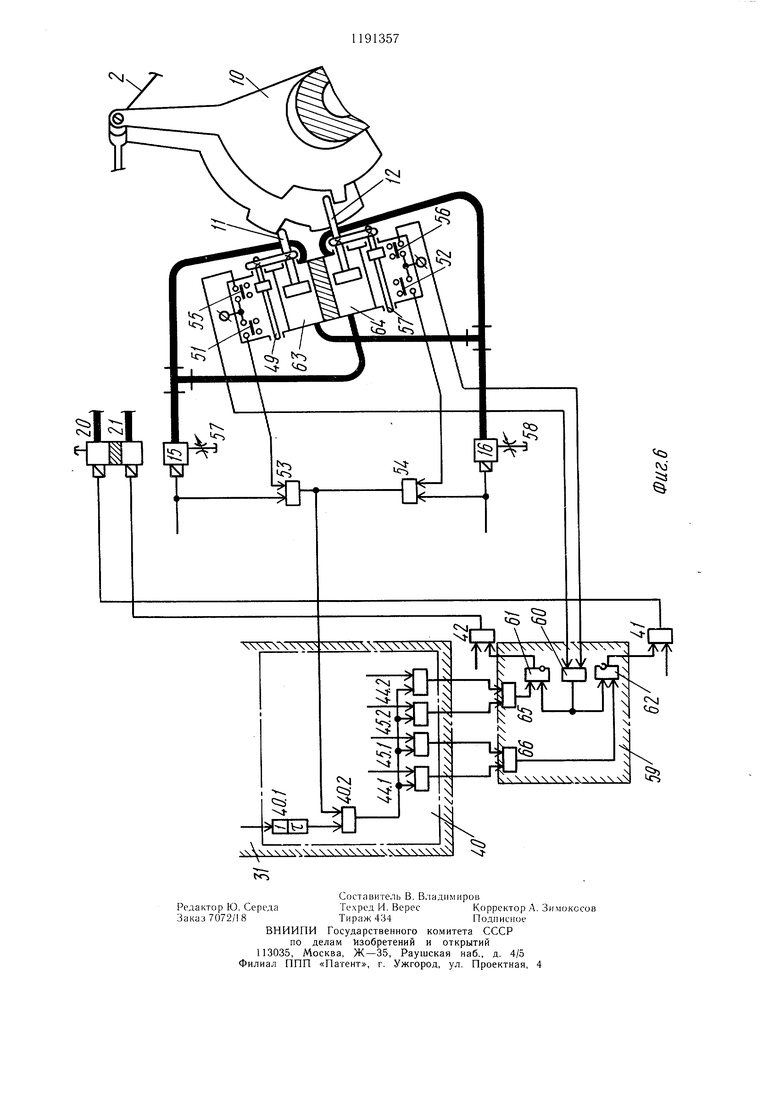
На фиг. 1 приведена структурно-логическая схема первого варианта привода; на фиг. 2 - дополнительные узлы и связи привода по первому варианту; на фиг. 3 - узлы и связи второго варианта привода, отличные от первого варианта; на фиг. 4 - узлы
и связи третьего варианта привода, отличные от первого варианта; на фиг. 5 - дополнительные узлы и связи по третьему варианту; на фиг. 6 - узлы и связи четвертого варианта привода.
Учитывая идентичность ряда блоков привода в различных ее вариантах, на фиг. I приведена структурно-логическая схема только первого варианта системы, а узлы, обеспечивающие вариантность системы, приведены на последующих чертежах, при этом при рассмотрении последующи.х вариантов
основное внимание уделено измененным по сравнению со схемой нервого варианта узлам и связям основных блоков привода.
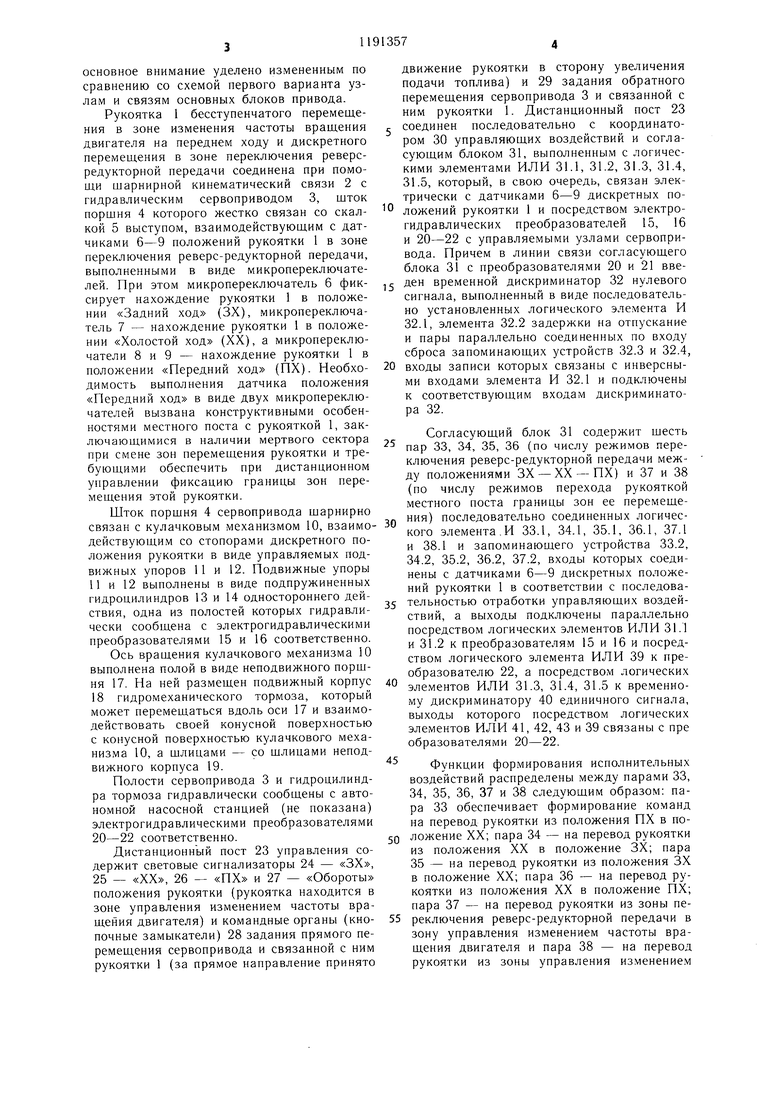
Рукоятка 1 бесступенчатого перемещения в зоне изменения частоты вращения двигателя на переднем ходу и дискретного перемещения в зоне переключения реверсредукторной передачи соединена при помощи шарнирной кинематический связи 2 с гидравлическим сервоприводом 3, шток поршня 4 которого жестко связан со скалкой 5 выступом, взаимодействующим с датчиками 6-9 положений рукоятки 1 в зоне переключения реверс-редукторной передачи, выполненными в виде микропереключателей. При этом микропереключатель 6 фиксирует нахождение рукоятки 1 в положении «Задний ход (ЗХ), микропереключатель 7 - нахождение рукоятки 1 в положении «Холостой ход (XX), а микропереключатели 8 и 9 - нахождение рукоятки 1 в положении «Передний ход (ПХ). Необходимость выполнения датчика положения «Передний ход в виде двух микропереключателей вызвана конструктивными особенностями местного поста с рукояткой 1, заключающимися в наличии мертвого сектора при смене зон перемещения рукоятки и требующими обеспечить при дистанционном управлении фиксацию границы зон перемещения этой рукоятки.
Шток поршня 4 сервопривода шарнирно связан с кулачковым механизмом 10, взаимодействующим со стопорами дискретного положения рукоятки в виде управляемых подвижных упоров 11 и 12. Подвижные упоры 11 и 12 выполнены в виде подпружиненных гидроцилиндров 13 и 14 одностороннего действия, одна из полостей которых гидравлически сообщена с электрогидравлическими преобразователями 15 и 16 соответственно.
Ось вращения кулачкового механизма 10 выполнена полой в виде неподвижного порщня 17. На ней размещен подвижный корпус 18 гидромеханического тормоза, который может перемещаться вдоль оси 17 и взаимодействовать своей конусной поверхностью с конусной поверхностью кулачкового механизма 10, а шлицами - со щлицами неподвижного корпуса 19.
Полости сервопривода 3 и гидроцилиндра тормоза гидравлически сообщены с автономной насосной станцией (не показана) электрогидравлическими преобразователями 20-22 соответственно.
Дистанционный пост 23 управления содержит световые сигнализаторы 24 - «ЗХ, 25 - «XX, 26 - «ПХ и 27 - «Обороты положения рукоятки (рукоятка находится в зоне управления изменением частоты вращения двигателя) и командные органы (кнопочные замыкатели) 28 задания прямого перемещения сервопривода и связанной с ним рукоятки 1 (за прямое направление принято
движение рукоятки в сторону увеличения подачи топлива) и 29 задания обратного перемещения сервопривода 3 и связанной с ним рукоятки 1. Дистанционный пост 23 соединен последовательно с координатором 30 управляющих воздействий и согласующим блоком 31, выполненным с логическими элементами ИЛИ 31.1, 31.2, 31.3, 31.4, 31.5, который, в свою очередь, связан электрически с датчиками 6-9 дискретных положений рукоятки 1 и посредством электрогидравлических преобразователей 15, 16 и 20-22 с управляемыми узлами сервопривода. Причем в линии связи согласующего блока 31 с преобразователями 20 и 21 введен временной дискриминатор 32 нулевого сигнала, выполненный в виде последовательно установленных логического элемента И
входы записи которых связаны с инверсными входами элемента И 32.1 и подключены к соответствующим входам дискриминатора 32.
Согласующий блок 31 содержит шесть пар 33, 34, 35, 36 (по числу режимов переключения реверс-редукторной передачи между положениями ЗХ - XX - ПХ) и 37 и 38 (по числу режимов перехода рукояткой местного поста границы зон ее перемещения) последовательно соединенных логического элемента.И 33.1, 34.1, 35.1, 36.1, 37.1 и 38.1 и запоминающего устройства 33.2,
элементов ИЛИ 31.3, 31.4, 31.5 к вре.менному дискриминатору 40 единичного сигнала, выходы которого посредством логических элементов ИЛИ 41, 42, 43 и 39 связаны с пре образователями 20-22.
Функции формирования исполнительных воздействий распределены между парами 33, 34, 35, 36, 37 и 38 следующим образом: пара 33 обеспечивает формирование команд на перевод рукоятки из положения ПХ в положение XX; пара 34 - на перевод рукоятки из положения XX в положение ЗХ; пара 35 - на перевод рукоятки из положения ЗХ в положение XX; пара 36 - на перевод рукоятки из положения XX в положение ПХ; пара 37 - на перевод рукоятки из зоны переключения реверс-редукторной передачи в зону управления изменением частоты вращения двигателя и пара 38 - на перевод рукоятки из зоны управления изменение.м
частоты вращения двигателя в зону переключения реверс-редукторной передачи.
Временной дискриминатор 40 единичного сигнала выполнен в виде последовательно установленных элемента 40.1 задержки на срабатывание и двух пар 44 и 45, параллельно соединенных по одному входу логических элементов И 44.1, 44.2, 45.1, 45.2, второй вход которых связан с выходами пар 37 и 38, 35 и 36; 33 и 34 соответственно, при этом выходы пары 44 связаны с преобразователями 20 и 21 непосредственно, а выходы пары 45 - через дискриминатор 32 нулевого сигнала.
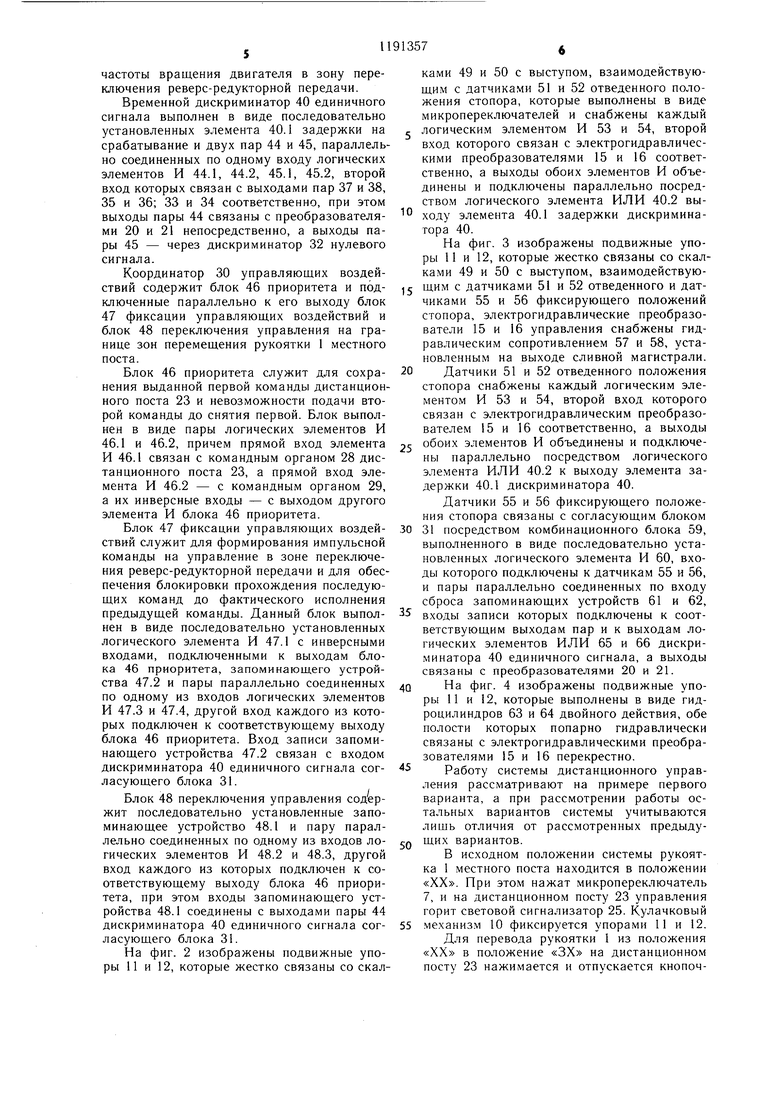
Координатор 30 управляющих воздействий содержит блок 46 приоритета и подключенные параллельно к его выходу блок 47 фиксации управляющих воздействий и блок 48 переключения управления на границе зон перемещения рукоятки 1 местного поста.
Блок 46 приоритета служит для сохранения выданной первой команды дистанционного поста 23 и невозможности подачи второй команды до снятия первой. Блок выполнен в виде пары логических элементов И 46.1 и 46.2, причем прямой вход элемента И 46.1 связан с командным органом 28 дистанционного поста 23, а прямой вход элемента И 46.2 - с командным органом 29, а их инверсные входы - с выходом другого элемента И блока 46 приоритета.
Блок 47 фиксации управляющих воздействий служит для формирования импульсной команды на управление в зоне переключения реверс-редукторной передачи и для обеспечения блокировки прохождения последующих команд до фактического исполнения предыдущей команды. Данный блок выполнен в виде последовательно установленных логического элемента И 47Л с инверсными входами, подключенными к выходам блока 46 приоритета, запоминающего устройства 47.2 и пары параллельно соединенных по одному из входов логических элементов И 47.3 и 47.4, другой вход каждого из которых подключен к соответствующему выходу блока 46 приоритета. Вход записи запоминающего устройства 47.2 связан с входом дискриминатора 40 единичного сигнала согласующего блока 31.
Блок 48 переключения управления содержит последовательно установленные запоминающее устройство 48.1 и пару параллельно соединенных по одному из входов логических элементов И 48.2 и 48.3, другой вход каждого из которых подключен к соответствующему выходу блока 46 приоритета, при этом входы запоминающего устройства 48.1 соединены с выходами пары 44 дискриминатора 40 единичного сигнала согласующего блока 31.
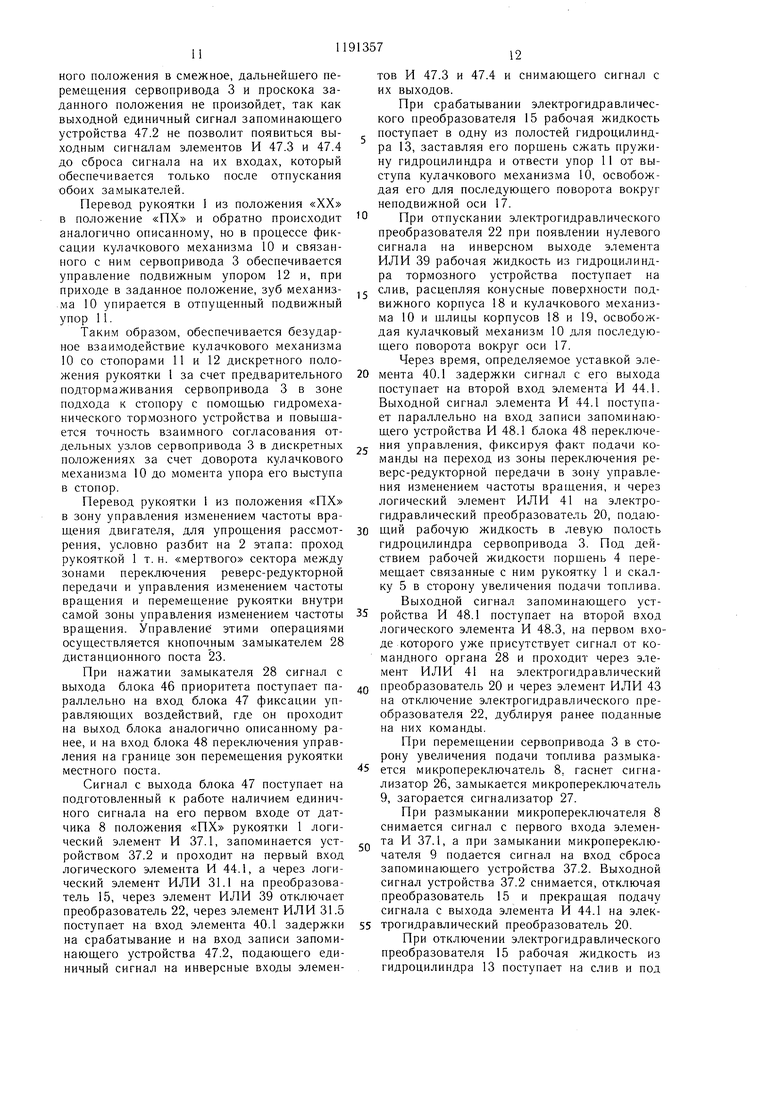
На фиг. 2 изображены подвижные упоры 11 и 12, которые жестко связаны со скалками 49 и 50 с выступом, взаимодействующим с датчиками 51 и 52 отведенного положения стопора, которые выполнены в виде микропереключателей и снабжены каждый с логическим элементом И 53 и 54, второй вход которого связан с электрогидравлическими преобразователями 15 и 16 соответственно, а выходы обоих элементов И объединены и подключены параллельно посредством логического элемента ИЛИ 40.2 вы ходу элемента 40.1 задержки дискриминатора 40.
На фиг. 3 изображены подвижные упоры 11 и 12, которые жестко связаны со скалками 49 и 50 с выступом, взаимодействующим с датчиками 51 и 52 отведенного и датчиками 55 и 56 фиксирующего положений стопора, электрогидравлические преобразователи 15 и 16 управления снабжены гидравлическим сопротивлением 57 и 58, установленным на выходе сливной магистрали.
0 Датчики 51 и 52 отведенного положения стопора снабжены каждый логическим элементом И 53 и 54, второй вход которого связан с электрогидравлическим преобразователем 15 и 16 соответственно, а выходы
5 обоих элементов И объединены и подключены параллельно посредством логического элемента ИЛИ 40.2 к выходу элемента задержки 40.1 дискриминатора 40.
Датчики 55 и 56 фиксирующего положения стопора связаны с согласующим блоком
0 31 посредством комбинационного блока 59, выполненного в виде последовательно установленных логического элемента И 60, входы которого подключены к датчикам 55 и 56, и пары параллельно соединенных по входу сброса запоминающих устройств 61 и 62,
входы записи которых подключены к соответствующим выходам пар и к выходам логических элементов ИЛИ 65 и 66 дискриминатора 40 единичного сигнала, а выходы связаны с преобразователями 20 и 21.
0 На фиг. 4 изображены подвижные упоры 11 и 12, которые выполнены в виде гидроцилиндров 63 и 64 двойного действия, обе полости которых попарно гидравлически связаны с электрогидравлическими преобразователями 15 и 16 перекрестно.
Работу системы дистанционного управления рассматривают на примере первого варианта, а при рассмотрении работы остальных вариантов системы учитываются лищь отличия от рассмотренных предыдуQ щих вариантов.
В исходном положении системы рукоятка 1 местного поста находится в положении «XX. При этом нажат микропереключатель 7, и на дистанционном посту 23 управления горит световой сигнализатор 25. Кулачковый
5 механизм 10 фиксируется упорами 11 и 12.
Для перевода рукоятки 1 из положения
«XX в положение «ЗХ на дистанционном
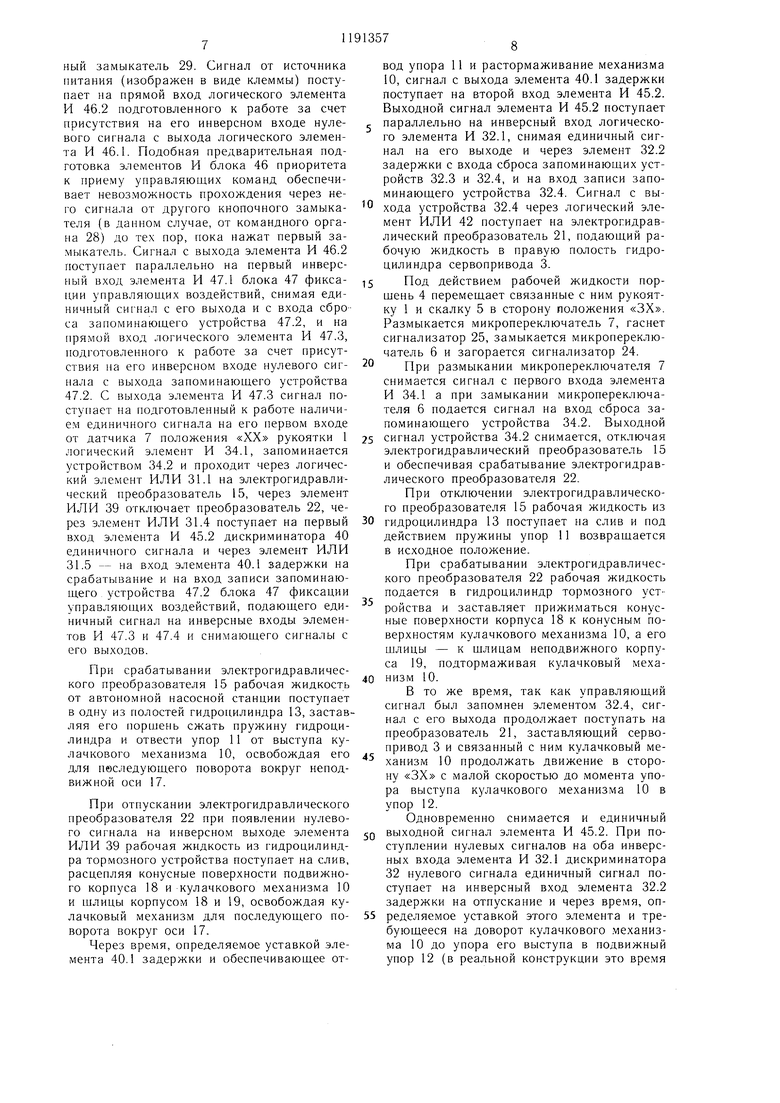
ПОСТУ 23 нажимается и отпускается кнопочный замыкатель 29. Сигнал от источника питания (изображен в виде клеммы) ноступает на прямой вход логического элемента И 46.2 подготовленного к работе за счет присутствия на его инверсном входе нулевого сигнала с выхода логического элемента И 46.1. Подобная предварительная подготовка элементов И блока 46 приоритета к прие.му управляюпдих команд обеспечивает невозможность прохождения через него сигнала от другого кнопочного замыкателя (в данном случае, от командного органа 28) до тех пор, пока нажат первый замыкатель. Сигнал с выхода элемента И 46.2 поступает параллельно на первый инверсный вход элемента И 47.1 блока 47 фиксации управляющих воздействий, снимая единичный сигнал с его выхода и с входа сбро са запоминающего устройства 47.2, и на фямой вход логического элемента И 47.3, подготовленного к работе за счет присутствия на его инверсном входе нулевого сигнала с выхода запоминающего устройства 47.2. С выхода элемента И 47.3 сигнал поступает на подготовленпый к работе наличие.м единичного сигнала на его первом входе от датчика 7 положения «XX рукоятки 1 логический элемент И 34.1, запоминается устройством 34.2 и проходит через логический элемент ИЛИ 31.1 на электрогидравлический преобразователь 15, через элемент ИЛИ 39 отключает преобразователь 22, через элемент ИЛИ 31.4 поступает на первый вход элемепта И 45.2 дискриминатора 40 единичного сигнала и через элемент ИЛИ 31.5 - на вход элемента 40.1 задержки на срабатывание и на вход записи запоминающего устройства 47.2 блока 47 фиксации управляющих воздействий, подающего единичный сигнал на инверсные входы элементов И 47.3 и 47.4 и снимающего сигналы с его выходов. При срабатывании электрогидравлического преобразователя 15 рабочая жидкость от автономной насосной станции поступает в одну из полостей гидроцилиндра 13, заставляя его поршень сжать пружину гидроцилиндра и отвести упор 11 от выступа кулачкового механизма 10, освобождая его для последующего поворота вокруг неподвижной оси 17. При отпускании электрогидравлического преобразователя 22 при появлении нулевого сигнала на инверсном выходе элемента ИЛИ 39 рабочая жидкость из гидроцилиндра тормозного устройства поступает на слив, расцепляя конусные новерхности подвижного корнуса 18 и кулачкового механизма 10 и щлицы корпусом 18 и 19, освобождая кулачковый механизм для последующего поворота вокруг оси 17. Через время, определяемое уставкой элемента 40.1 задержки и обеспечивающее отвод упора 11 и растормаживание механизма 10, сигнал с выхода элемента 40.1 задержки поступает на второй вход элемента И 45.2. Выходной сигнал элемента И 45.2 поступает параллельно на инверсный вход логического элемента И 32.1, снимая единичный сигнал на его выходе и через элемент 32.2 задержки с входа сброса запоминающих устройств 32.3 и 32.4, и на вход записи запоминающего устройства 32.4. Сигнал с выхода устройства 32.4 через логический элемент ИЛИ 42 поступает на электрогидравлический преобразователь 21, подающий рабочую жидкость в правую полость гидроцилиндра сервопривода 3. Под действием рабочей жидкости поршень 4 перемещает связанные с ним рукоятку 1 и скалку 5 в сторону положения «ЗХ. Размыкается микропереключатель 7, гаснет сигнализатор 25, замыкается микропереключатель 6 и загорается сигнализатор 24. При размыкании микропереключателя 7 снимается сигнал с нервого входа элемента И 34.1 а при замыкании микронереключателя 6 нодается сигнал на вход сброса запоминающего устройства 34.2. Выходной сигнал устройства 34.2 снимается, отключая электрогидравлический преобразователь 15 и обеспечивая срабатывание электрогидравлического преобразователя 22. При отключении электрогидравлического преобразователя 15 рабочая жидкость из гидроцилиндра 13 поступает на слив и под действием пружины упор 11 возвращается в исходное положение. При срабатывании электрогидравлического преобразователя 22 рабочая жидкость подается в гидроцилиндр тормозного устройства и заставляет нрижи.маться конусные поверхности корпуса 18 к конусным поверхностям кулачкового механизма 10, а его щлицы - к щлицам неподвижного корпуса 19, подтормаживая кулачковый механизм 10. В то же время, так как управляющий сигнал был запомнен элементом 32.4, сигнал с его выхода продолжает поступать на преобразователь 21, заставляющий сервопривод 3 и связанный с ним кулачковый механизм 10 продолжать движение в сторону «ЗХ с малой скоростью до момента упора выступа кулачкового механизма 10 в упор 12. Одновременно снимается и единичный выходной сигнал элемента И 45.2. При поступлении нулевых сигналов на оба инверсных входа элемента И 32.1 дискриминатора 32 нулевого сигнала единичный сигнал поступает на инверсный вход элемента 32.2 задержки на отпускание и через время, определяемое уставкой этого элемента и требующееся на доворот кулачкового механизма 10 до упора его выступа в подвижный унор 12 (в реальной конструкции это вре.мя
составляет 0,05-0,2с), сигнал с выхода запоминающего элемента 32.4 снимается сигналом, постуг ившим с выхода элемента 32.2 задержки на его вход сброса.
Электрогидравлический преобразователь 21 отключается, фиксируя сервопривод 3 в положении «ЗХ. Для перевода рукоятки 1 из положения «ЗХ в положение «XX на дистанционпом посте 23 управления нажимается и отпускается кнопочный замыкатель 28.
Сигнал от источника питания поступает на прямой вход логического элемента И 46.1, подготовленного к работе за счет присутствия на его инверсном входе нулевого сигнала с выхода логического элемента И 46.2. Сигнал с выхода элемента И 46.1 поступает параллельно на второй инверсный вход элемента И 47.1, снимая единичный сигнал с его выхода и с входа сброса запоминающего устройства 47.2, и на прямой вход логического элемента И 47.4, подготовленного к работе за счет присутствия на его инверсном входе нулевого сигнала с выхода запоминающего устройства 47.2. С выхода элемента И 47.4 сигнал поступает на подготовленный к работе наличием сигнала на его первом входе от датчика 6 положения «ЗХ рукоятки 1 логический элемент И 35.1, запоминается устройством 35.2 и проходит через логический элемент ИЛИ 31.1 на преобразователь 15, через элемент ИЛИ 39 отключает преобразователь 22, через элемент ИЛИ 31.3 поступает на первый вход элемента И 45.1 дискриминатора 40 единичного сигнала и через элемент ИЛИ 31.5 - на вход элемента 40.1 задержки на срабатывание и на вход записи запоминающего устройства 47.2, подающего единичный сигнал на инверсные входы элементов И 47.3, и 47.4 и снимающего сигналы с их выходов.
При срабатывании электрогидравлического преобразователя 15 рабочая жидкость от автономной насосной станции поступает в одну из полостей гидроцилиндра 13, заставляя его поршень сжать пружину гидроцилиндра и отвести упор 11 от выступа кулачкового механизма 10, освобождая его для последующего поворота вокруг неподвижной оси 17.
При отпускании электрогидравлического преобразователя 22 при появлении нулевого сигнала на инверсном выходе элемента ИЛИ 39 рабочая жидкость из гидроцилиндра тормозного устройства поступает на слив, расцепляя конусные поверхности подвижного корпуса 18 и кулачкового механизма 10 и щлицы корпусов 18 и 19, освобождая кулачковый механизм 10 для последующего поворота вокруг оси 17.
Через время, определяемое уставкой элемента 40.1 задержки сигнал с его выхода поступает на второй вход элемента И 45.1. Выходной сигнал элемента И 45.1 поступает
параллельно на инверсный вход логического элемента И 32.1, снимая единичный сигнал на его выходе и через элемент 32.2 задержки с входа сброса запоминающих с устройств 32.3 и 32.4, и на вход записи запоминающего устройства 32.3. Сигнал с выхода устройства 32.3 через логический элемент ИЛИ 41 поступает на преобразователь 20, подающий рабочую жидкость в левую полость гидроцилиндра сервопривода 3.
Под действием рабочей жидкости поршень 4 перемещает связанные с ним рукоятку 1 и скалку 5 в сторону положения «XX, размыкается микропереключатель 6, гаснет сигнализатор 24, замыкается микропереклю
5 чатель 7 и загорается сигнализатор 25.
При размыкании микропереключателя 6 сни.,1ется сигнал с первого входа элемента И 35.1, а при замыкании микропереключателя 7 подается сигнал на вход сброса запоминающего устройства 35.2. Выходной сигнал устройства 35.2 снимается, отключая преобразователь 15 и обеспечивая срабатывание преобразователя 22.
При отключении электрогидравлического преобразователя 15 рабочая жидкость из
5 гидроцилиндра 13 поступает на слив и под действием пружины упор 11 возвращается в исходное положение.
При срабатывании электрогидравлического преобразователя 22 рабочая жидкость подается в гидроцилиндр тормозного устройства и заставляет прижиматься конусные поверхности подвижного корпуса 18 к конусным поверхностям кулачкового механизма 10, а его щлицы - к щлицам неподвижного корпуса 19, подтормаживая кулачковый механизм 10.
В то же время, так как управляющий сигнал был зацомнен элементом 32.3, сигнал с его выхода продолжает поступать на преобразователь 20, заставляющий сервопривод 3 и связанный с ним кулачковый мехаQ низм 10 продолжать движение в сторону положения «XX с малой скоростью до момента упора зуба кулачкового механизма 10 в упор 12.
Одновременно снимается и единичный выходной сигнал элемента И 45.1. При поступлении нулевых сигналов на оба инверсных входа элемента И 32.1 единичный сигнал с его выхода поступает на инверсный вход элемента 32.2 задтержки на отпускание 0 и через время, определяемое уставкой этого элемента, сигнал с выхода запоминающего элемента 32.3 снимается сигналом, поступившим с выхода элемента 32.2 задержки на его вход сброса. Электрогидравлический преобразователь 20 отключается, фиксируя 5 сервопривод 3 в положении «XX.
В случае длительного нажатия кнопочного замыкателя на время, превышаюп1ее время перемещения сервопривода 3 из одного положения в смежное, дальнейшего перемещения сервопривода 3 и проскока заданного положения не произойдет, так как выходной единичный сигнал запоминающего устройства 47.2 не позволит появиться выходным сигналам элементов И 47.3 и 47.4 до сброса сигнала на их входах, который обеспечивается только после отпускания обоих замыкателей.
Перевод рукоятки 1 из положения «XX в положение «ПХ и обратно происходит аналогично описанному, но в процессе фиксации кулачкового механизма 10 и связанного с ним сервопривода 3 обеспечивается управление подвижным упором 12 и, при приходе в заданное положение, зуб механиз,ма 10 упирается в отпущенный подвижный упор 11.
Таким образом, обеспечивается безударное взаимодействие кулачкового механизма 10 со стопорами 11 и 12 дискретного положения рукоятки 1 за счет предварительного нодтормаживания сервопривода 3 в зоне подхода к стопору с помощью гидромеханического тормозного устройства и повышается точность взаимного согласования отдельных узлов сервопривода 3 в дискретных положениях за счет доворота кулачкового механизма 10 до момента упора его выступа в стопор.
Перевод рукоятки 1 из положения «ПХ в зону управления изменением частоты вращения двигателя, для упрощения рассмотрения, условно разбит на 2 этапа: проход рукояткой 1 т. н. «мертвого сектора между зонами переключения реверс-редукторной передачи и управления изменением частоты вращения и перемещение рукоятки внутри самой зоны управления изменением частоты вращения. Управление этими операциями осуществляется кнопочным замыкателем 28 дистанционного поста 23.
При нажатии замыкателя 28 сигнал с выхода блока 46 приоритета поступает параллельно на вход блока 47 фиксации управляющих воздействий, где он проходит на выход блока аналогично описанному ранее, и на вход блока 48 переключения управления на границе зон перемещения рукоятки местного поста.
Сигнал с выхода блока 47 поступает на подготовленный к работе наличием единичного сигнала на его первом входе от датчика 8 положения «ПХ рукоятки 1 логический элемент И 37.1, запоминается устройством 37.2 и проходит на первый вход логического элемента И 44.1, а через логический элемент ИЛИ 31.1 на преобразователь 15, через элемент ИЛИ 39 отключает преобразователь 22, через элемент ИЛИ 31.5 поступает на вход элемента 40.1 задержки на срабатывание и на вход записи запоминающего устройства 47.2, подающего единичный сигнал на инверсные входы элементов И 47.3 и 47.4 и снимающего сигнал с их выходов.
При срабатывании электрогидравлического преобразователя 15 рабочая жидкость поступает в одну из полостей гидроцилиндра 13, заставляя его поршень сжать пружину гидроцилиндра и отвести упор 11 от выступа кулачкового механизма 10, освобождая его для последующего поворота вокруг неподвижной оси 17.
При отпускании электрогидравлического преобразователя 22 при появлении нулевого сигнала на инверсном выходе элемента ИЛИ 39 рабочая жидкость из гидроцилиндра тормозного устройства поступает на
слив, расцепляя конусные поверхности подвижного корпуса 18 и кулачкового механизма 10 и шлицы корпусов 18 и 19, освобождая кулачковый механизм 10 для последующего поворота вокруг оси 17.
Через время, определяемое уставкой элемента 40.1 задержки сигнал с его поступает на второй вход элемента И 44.1. Выходной сигнал элемента И 44.1 поступает параллельно на вход записи запоминающего устройства И 48.1 блока 48 переключения управления, фиксируя факт подачи команды на переход из зоны переключения реверс-редукторной передачи в зону управления изменением частоты вращения, и через логический элемент ИЛИ 41 на электрогидравлический преобразователь 20, подающий рабочую жидкость в левую полость гидроцилиндра сервопривода 3. Под действием рабочей жидкости поршень 4 перемещает связанные с ним рукоятку 1 и скалку 5 в сторону увеличения подачи топлива. Выходной сигнал запоминающего устройства И 48.1 поступает на второй вход логического элемента И 48.3, на первом входе которого уже присутствует сигнал от командного органа 28 и проходит через элемент ИЛИ 41 на электрогидравлический
преобразователь 20 и через элемент ИЛИ 43 на отключение электрогидравлического преобразователя 22, дублируя ранее поданные на них команды.
При перемещении сервопривода 3 в сторону увеличения подачи топлива размыкается микропереключатель 8. гаснет сигнализатор 26, замыкается микропереключатель 9, загорается сигнализатор 27.
При размыкании микропереключателя 8 снимается сигнал с первого входа элемента И 37.1, а при замыкании микропереключателя 9 подается сигнал на вход сброса запоминающего устройства 37.2. Выходной сигнал устройства 37.2 снимается, отключая преобразователь 15 и прекращая подачу сигнала с выхода элемента И 44.1 на электрогидравлический преобразователь 20.
При отключении электрогидравлического преобразователя 15 рабочая жидкость из гидроцилиндра 13 поступает на слив и под
действием пружины упор 11 возвращается в исходное положение.
В то же время отключения электрогидравлического преобразователя 20 и включения электрогидравлического преобразователя 22 не происходит, так как на них подается дублирующий сигнал с выхода элемента И 48.3. Сервопривод 3 продолжает перемещать рукоятку 1 в сторону увеличения подачи топлива.
При отпускании кнопочного замыкателя 28 выходной сигнал с элемента И 48.3 снимается и прекращает подачу управляющих сигналов на электрогидравлические преобразователи 20 и 22. При срабатывании электрогидравлического преобразователя 22 рабочая жидкость подается в гидроцилиндр тормозного устройства и заставляет прижиматься друг к другу конусные поверхности подвижного корпуса 18 и кулачкового механизма 10 и щлицы корпусов 18 и 19, затормаживая кулачковый механизм 10. Одновременное отключение электрогидравлического преобразователя 20 фиксирует сервопривод 3 в требуемом положении.
Последующее перемещение рукоятки 1 в сторону увеличения подачи топлива происходит при новом нажатии замыкателя 28 с помощью логических элементов И 48.3, на втором входе которого уже присутствует сигнал с выхода запоминающего устройства И 48.1 и ИЛИ 41 и 43.
Перевод рукоятки 1 из зоны управления изменением частоты вращения двигателя в положение «ПХ может быть также разбит на 2 этапа: перемещение рукоятки 1 внутри самой зоны управления изменением частоты вращения в сторону уменьщения подачи топлива, и проход рукояткой «мертвого сектора между зонами управления, изменением частоты вращения двигателя и переключением реверс-редукторной передачи. Управление этими операциями осуществляется кнопочным замыкателем 29 дистанционного поста 23.
При нажатии замыкателя 29 сигнал с выхода блока 46 приоритета поступает параллельно на вход блока 47 фиксации управляющих воздействий, где он проходит на выход блока аналогично описанному ранее, и на вход блока 48 переключения управления на границе зон перемещения рукоятки местного поста.
Сигнал с выхода блока 47 поступает на элемент И 38.1, однако дальше не проходит, так как на втором инверсном входе этого элемента присутствует единичный сигнал от датчика 9. Поступающий же на первый вход элемента И 48.2 сигнал проходит через логические элементы ИЛИ 42 и 43 на электрогидравлические преобразователи 21 и 22, так как на втором входе элемента И 48.2 уже присутствует сигнал с выхода запоминающего устройства 48.1.
При отпускании электрогидравлического преобразователя 22 при появлении нулевого сигнала на инверсном выходе элемента ИЛИ 39 рабочая жидкость из гидроцилиндра тормозного устройства поступает на слив, расцепляя конусные поверхности подвижного корпуса 18 и кулачкового механизма 10 и щлицы корпусов 18 и 19, освобождая кулачковый механизм 10 для последующего поворота вокруг оси 17.
О При срабатывании электрогидравлического преобразователя 21 рабочая жидкость поступает в правую полость гидроцилиндра, сервопривода 3, перемещая поршень 4 и связанные с ним рукоятку 1 и скалку 5 в , сторону уменьшения подачи топлива.
Прн отпускании кнопочного замыкателя 29 снимается управляющий сигнал с электрогидравлических преобразователей 21 и 22 и обеспечивается фиксация сервопривода 3 в требуемом положении.
0 Последующее перемещение рукоятки 1 в сторону уменьщения подачи топлива происходит при новом нажатии замыкателя 29. При продолжающе.мся по команде оператора перемещении рукоятки 1 в сторону умень5 тения подачи топлива размыкается микропереключатель 9 и гаснет сигнализатор 27. При этом на инверсном входе элемента И 38.1 появляется нулевой сигнал, позволяющий пройти сигналу с замыкателя 29 на выход элемента И 38.1. Выходной сигнал
0 элемента И 38.1 запоминается элементом 38.2 и поступает на первый вход элемента И 44.2 и через элемент ИЛИ 31.5 - на вход элемента 40.1 задержки на срабатывание и на вход записи запоминающего устройства 47.2, подающего единичный сигнал на инверсные входы элементов И 47.3 и 47.4 и снимающего сигнал с их выходов.
Через время, определяемое уставкой элемента 40.1 задержки сигнал с его выхода поступает на второй вход элемента И 44.2.
0 Выходной сигнал элемента И 44.2 поступает параллельно на вход сброса запоминающего устройства И 48.1 блока 48 переключения управления, фиксируя факт подачи команды на переход рукоятки из зоны управления изменением частоты вращения двигателя в зону переключения реверс-редукторной передачи, и через логический элемент ИЛИ 42 на электрогидравлический преобразователь 21.
При этом выходной сигнал элемента
Q И 48.2 снимается, прекращая подачу управляющего сигнала по этой цепи на электрогидравлические преобразователи 21 и 22. При срабатывании электрогидравлического преобразователя 22 при снятии нулевого сигнала на инверсном выходе элемента
5 ИЛИ 39 рабочая жидкость подается в гидроцилиндр тормозного устройства и заставляет прижиматься конусные поверхности подвижного корпуса 18 к конусным поверхностям кулачкового механизма 10, а его шлицы - к шлицам неподвижного корпуса 19, подтормаживая кулачковый механизм 10. Так как сигнал на электрогидравлический преобразователь 21 поступает еще и с выхода элемента И 44.2, то происходит дальнейшее перемещение сервопривода 3 с малой скоростью в сторону уменьшения подачи топлива до момента упора выступа кулачкового механизма 10 в упор 12. При замыкании микропереключателя 8 на дистанционном посте загорается сигнализатор 26. Сигнал с микропереключателя 8 поступает на вход сброса запоминающего устройства 38.2, снимая сигнал с его выхода и отключая электрогидравлический преобразователь 21. Сервопривод 3 останавливается в положении «ПХ рукоятки местного поста. При аппаратурной реализации второго варианта системы ее работа практически полностью идентична работе первого варианта системы, однако разрешение на перемещение сервопривода 3 в смежные дискретные положения в зоне переключения реверсредукторной передачи поступает от датчиков 51 и 52 отведенного положения стопора, т.е. после фиксации фактического срабатывания подвижного упора. Например, при срабатывании электрогидравлического преобразователя 15 рабочая жидкость поступает в одну из полостей гидроцилиндра 13, заставляя его поршень сжать пружину гидроцилиндра и отвести упор 11 от выступа кулачкового механизма 10. При нажатии микропереключателя 51 в отведенном положении упора 11 сигнал с микропереключателя поступает на второй вход логического элемента И 53, на первом входе которого уже присутствует управляющий сигнал, поданный ранее на электрогидравлический преобразователь 15. Сигнал с выхода элемента И 53 через логический элемент ИЛИ 40.2 поступает на входы элементов И 44.1, 45.1, 45.2, 44.2, подготавливая их к срабатыванию в соответствии с заданной оператором дистанционного поста командой. В случае выхода микропереключателей из строя или разрегулировке взаимосвязанных узлов подвижного упора, отработка управляющих воздействий будет обеспечиваться системой с помощью элемента 40.1 задержки на срабатывание, как в первом варианте системы. Таким образом, во втором варианте системы дополнительно к первому обеспечивается реализация рефлексного принципа управления и резервирование сигналов обратной связи при выполнении последовательных циклов работы системы. При аппаратурной реализации третьего варианта системы ее работа, в основном, соответствует работе первого и второго вариантов, однако доворот кулачкового механизма 10 до упора его выступа в стопор обеспечивается без временного дискриминатора нулевого сигнала, а за счет использования возможностей гидравлической части системы в части регулировки в щироких пределах ее временных характеристик. Например, при срабатывании электрогидравлического преобразователя 15 рабочая жидкость поступает в одну из полостей гидроцилиндра 13, заставляя его поршень сжать пружину гидроцилиндра и отвести упор 11 от выступа кулачкового механизма 10. При нажатии микропереключателя 51 в отведенном положении упора 11 сигнал с микропереключателя поступает на второй вход логического элемента И 53, на первом входе которого уже присутствует управляющий сигнал, поданный ранее на преобразователь 15. Сигнал с выхода элемента И 53 через логический элемент ИЛИ 40.2 поступает на входы элементов И 44.1, 45.1, 45.2, 44.2, подготавливая их к срабатыванию в соответствии с заданной оператором дистанционного поста командой. Сигнал с выхода одного из элементов И пар дискриминатора 40 . единичного сигнала, например, с выхода элемента И 45.1 при исполнении команды перемещения рукоятки 1 из положения «ЗХ в положение «XX, через логический элемент ИЛИ 66 поступает на вход записи запоминающего устройства 62 комбинационного блока 59. Сигнал с выхода запоминающего устройства 62 поступает на преобразователь 20, подающий рабочую жидкость в левую полость гидроцилиндра сервопривода 3. После замыкания микропереключателя 7 в положении «XX срабатывает электрогидравлический преобразователь 22, подтормаживая кулачковый механизм 10, и отключается преобразователь 15, заставляя упор 11 возвращаться в исходное положение. Возврат упора 1 будет происходить замедленно за счет дросселирования сливной магистрали электрогидравлического преобразователя 15 гидравлическим сопротивлением 15.1. До тех пор, пока упор I1 не вернется в исходное положение и не переключит датчик 55 фиксирующего положения стопора, сервопривод 3 будет продолжать перемещаться с малой скоростью до момента упора выступа кулачкового механизма 10 в упор 12. После срабатывания микропереключателя 55 его сигнал поступит на первый вход логического элемента И 60, на втором входе которого уже присутствует сигнал от микропереключателя 56. Элемент И 60 сработает и подаст сигнал на сброс запоминающего устройства 62 и снимет выходной сигнал этого устройства с электрогидравлического преобразователя 20.
. Сервопривод 3 остановится и зафиксируется упорами 11 и 12.
При реализации третьего варианта привода его работа практически полностью идентична работе первого варианта системы, однако за счет исполнения подвижных упоров 11 и 12 в виде гидроцилиндров 63 и 64 двойного действия, полости которых попарно подключены перекрестно к электрогидравлическим преобразователям 15 и 16, достигается защита системы от силового отжима стопора при возникновении люфтов в $ I .l 1 75§йЩ1 УХ/ууУх х// /xyyVy-x/ f/ //xXyj ™
системе или при некачественном изготовлении отдельных узлов сервопривода.
При срабатывании электрогидравлического преобразователя 15 рабочая жидкость поступает в штоковую полость гидроцилиндра 63 упора 11, обеспечивая его отведение от кулачкового механизма 10, и в надпоршневую полость гидроциливдра 64 упора 12, обеспечивая невозможность его отжима.
При реализации третьего варианта привода с дополнениями его работа аналогична работе основных узлов и блоков первого и третьего вариантов. При реализации четвертого варианта системы ее работа аналогична работе основных узлов и блоков первого, второго и третьего вариантов. Ы 38.2
HzfFJH.
0
ш
3Z.3
| Дистанционный привод исполнительного устройства реверса и изменения частоты вращения главного судового двигателя с однорукояточным постом управления | 1981 |
|
SU982970A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
