Изобретение относится к машиностроению, а именно к шарнирно-рычажным механизмам, и может быть использовано в управляющих механизмах, работающих в условиях повышенной вибрации.
Цель изобретения - повышение надежности и точности механизма в условиях повышенной вибрации и, как следствие, повышение надежности исполнительных устройств.
На чертеже показана схема предлагаемого механизма.
Механизм содержит основание 1, размещенные на нем привод 2 и исполнительное устройство 3, ведущее звено в виде полого цилиндрического стержня 4 со сквозным прямолинейным пазом 5 и ведомое звено в виде полого цилиндрического рычага 6 со сквозным прямолинейным пазом 7. Стержень 4 и рычаг 6 расположены в одной плоскости перпендикулярно один другому, при этом стержень 4 проходит сквозь паз 7 рычага 6.
Внутри цилиндрических полостей стержня 4 и рычага б, в их перекрестии, расположено соединительное звено в виде сферы 8, которая взаимодействует одновременно со стенками полостей как стержня 4, так и рычага 6, и может при это.м совершать как
вращательное движение вокруг своего центра, так и возвратно-поступательное движение вдоль осей стержня 4 и рычага 6.
Стержень 4 связан с приводом 2, сообщающим ему возвратно-поступательное движение в направлении, перпендикулярном продольной оси рычага 6, а рычаг 6 одним концом жестко связан с ведущим валом 9 исполнительного устройства 3.
Механизм работает следующим образом.
Привод 2 сообщает стержню 4 прямолинейное движение в заданном направлении, перпендикулярном продольной оси рычага 6. Это движение через сферу 8 сообщается рычагу 4, который, будучи жестко связан с 5 ведущим валом 9 исполнительного устройства 3, поворачивается вместе с валом 9 на заданный угол. При этом сфера 8 перекатывается по стенкам полости рычага 6 и вместе со стержнем 4 перемещается вдоль оси рычага 6.
Воздействие вибрации, направленное вдоль плоскости расположения стержня 4 и рычага б, не передается ни на привод 2, ни на вал 9 исполнительного устройства 3, так как сфера 8 при таком воздействии свободно перемещается как вдоль оси стержня 4, так и вдоль оси рычага 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| ВАРИАТОР "МИГ" | 2009 |
|
RU2405115C1 |
| ПЕРЕДАЧА "МИГ" | 2009 |
|
RU2407931C1 |
| ПЛАНЕТАРНЫЙ МОТОР-КОМПРЕССОР | 1993 |
|
RU2095578C1 |
| Вышивальная машина | 1980 |
|
SU1044696A1 |
| Стенд для испытания замков | 1988 |
|
SU1705720A1 |
| Импульсный вариатор | 1987 |
|
SU1469232A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ И НАОБОРОТ | 2015 |
|
RU2610319C1 |
| Электромеханический привод | 1989 |
|
SU1695451A1 |
ПРОСТРАНСТВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ, содержащий основание, размещенные на нем привод и исполнительное устройство, связанное с приводом и имеющее возможность возвратно-поступательного перемещения ведущее звено, ведомое звено в виде полого цилиндрического рычага со сквозным прямолинейным пазом, одним концом связанного с исполнительным устройством, и соединительное звено в виде сферы, размещенное в полости ведомого звена с возможностью вращения и возвратно-поступательного движения и взаимодействующее с ведущим и ведомым звеньями, отличающийся тем, что, с целью повыщения надежности и точности, ведущее звено выполнено в виде полого стержня со сквозным прямолинейным пазом, расположенного в одной плоскости с ведомым звеном перпендикулярно последнему, проходящего через его паз и охватывающего соединительное звено.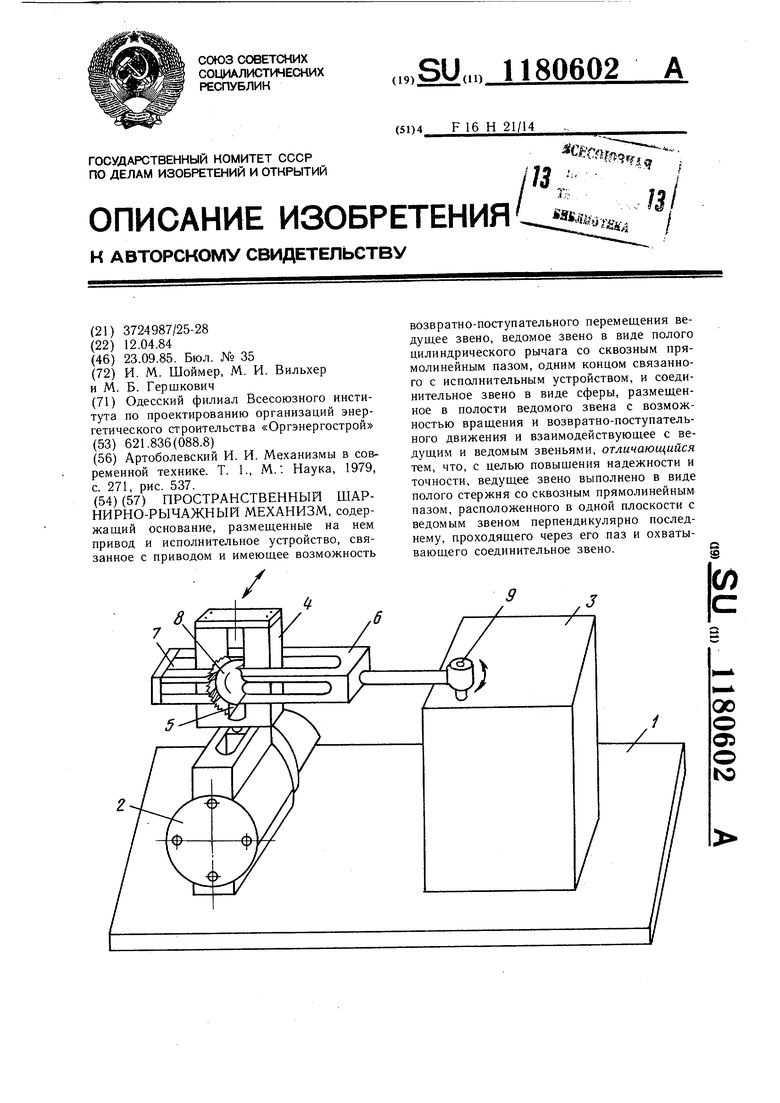
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике | |||
| Т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Искроудержатель для паровозов | 1920 |
|
SU271A1 |
| Кухонный очаг | 1922 |
|
SU537A1 |
