1 Изобретение относится к электротехнике, а именно к электроприводам постоянного тока с подчиненным регулированием параметров, например к электроприводам механизмов, требующи высоких быстродействия и жесткости механических характеристик. Цель изобретения - увеличение быстродействия и уменьшение динамического падения скорости. На чертеже изображена блок-схема электропривода. Электропривод содержит электродви гатель 1, якорная цепь которого подключена к управляемому преобразоват лю 2, в цепь управления которого включены последовательно соединенны задатчик 3 интенсивности, входной фильтр 4 и пропорционально-интеграл ный регулятор 5 скорости, к второму входу которого подключен датчик 6 скорости. Электропривод содержит та же реальное форсирующее звено 7, вход которого подключен к выходу ре гулятора 5 скорости, а выход - к вх ду управляемого преобразователя 2. Функциональное назначение реального форсирующего звена 7 - компенс ция электромагнитной и механической инерционностей электропривода и orp ничение полосы частот управляющего сигнала преобразователя из условия обеспечения помехозащищенности системы. Поэтому параметры передаточно функции звена 7 необходимо выбирать согласно выражению W р) -iRjCTiElll V,,K,) . где I - приведенный к валу электродвигателя суммарный момент инерции электропривода-. R- - активное сопротивление якорной цепи электродвигателяJ Т„ - электромагнитная постоянная якорной цепи электродвигателя J С - конструктивная постоянная электродвигателя, - коэффициенты передачи датчика скорости и преобразовател соответственно; Тд - некомпёнсируемая постоянная времени системы (объекта), определяющая полосу пропуска ния системы, а следовательно 72 и быстродействие системы регулирования скорости; р - оператор Лапласа. Функциональное назначение фильтра 4и регулятора 5 скорости - обеспечение переходного процесса по управляющему воздействию,соответствующего настройке системы на модульный оптимум. Кроме того, регулятор 5 обеспечивает абсолютную жесткость механических характеристик системы. Передаточные функции фильтра 4 и регулятора 5скоростей должны быть соответственно равны w(p) 4f-p;T W (о) - - Электропривод постоянного тока работает следующим образом. Сигнал выхода задатчика 3 интенсивности, определяющего темп нарастания скорости ш , поступает на вход фильтра 4, обеспечивающего перерегулирование по скорости при изменении управляющего воздействия соответствующее настройке системы по модульному оптимуму. Выходной сигнал и) фильтра 4 поступает на первый вход регулятора 5 скорости, на второй вход которого поступает сигнал UD с датчика 6 скорости, пропорциональный скорости U) электродвигателя 1. Выходной сигнал и регулятора 5 скорости, равный сумме разности и интеграла от разности сигналов и)и а/ (интегральная составляющая обеспечивает абсо пютную жесткость механических характеристик, а разностная увеличивает быстродействие системы), поступает на вход реального форсирующего звена 7. Выходной сигнал Us. реального форсирующего звена 7, представляющий собой сигнал и, преобразованный реальным форсирующим звеном с учетом передаточной функции W(p), поступает на вход управляемого преобразователя 2, выходное напряжение которого , поступающее на якорную обмотку электродвигателя 1, определяет скорость его вращения. Реальное форсирующее звено с передаточной функцией W(р) обеспечивает компенсацию электромагнитной и механической инерционностей привода и ограничивает полосу пропускания системы. При наличии рассогласования в сигналах и)и lO сигнал U
31181
на вьпсоде .регулятора 5 скорости увеличивается, увеличивая соответственно сигнал Uy с выхода звена 7 и напряжение и, на выходе преобразователя 2 до тех пор, пока рассогласование не 5 уменьшится до нуля, т.е. в установившемся режиме скорость двигателя wопределяется только сигналом задания о) не зависит от возмущающих воздействий,10
074
Предлагаемая Система регулировйнйТя обладает вдвое большим быстродействием и вдвое меньшими динамическими па,цениями скорости при возмущакхцих воздействиях. Это улучшает показатели качества регулирования скорости рабочих механизмов и расширяет об- , ласть возможньгх применений систем злектроприводов постоянного тока с подчиненным регулированием.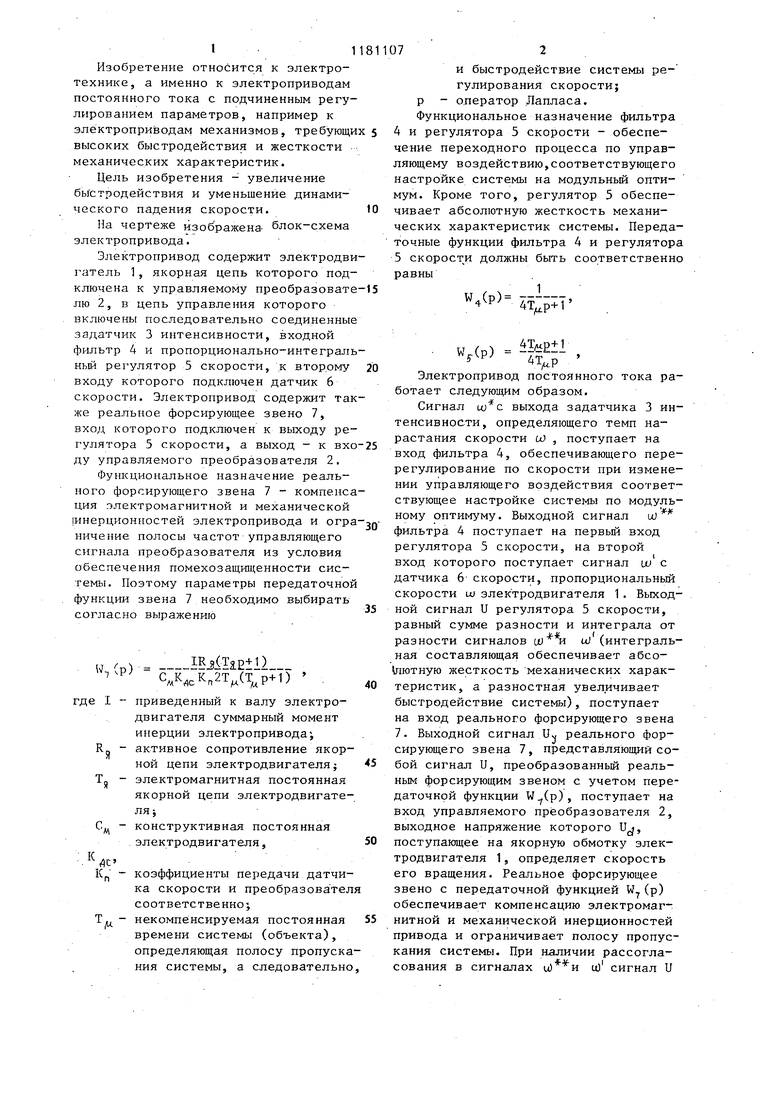

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1984 |
|
SU1358059A1 |
| Электропривод | 1987 |
|
SU1515324A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Самонастраивающаяся робастная система управления | 2023 |
|
RU2819264C1 |
| Электропривод с двухзонным регулированием скорости | 1983 |
|
SU1185516A1 |
| Устройство для управления реверсивнымВЕНТильНыМ пРЕОбРАзОВАТЕлЕМ | 1977 |
|
SU809465A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод постоянного тока | 1985 |
|
SU1261076A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2544483C1 |
ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержащий электродвигатель, якорная цепь которого подключена к управляемому преобразователю, в цепь Зпрй-вления которого включены последовательно соединенные задатчик интенсивности, входной фильтр и пропорционально-интегральньй регулятор скорости, к второму входукоторого подключен датчик скорости, отличаюния быстродействия и уменьшения динамического падения скорости, в него введено реальное форсирующее звено, а ч. вход которого подключен к выходу регулятора скорости, а выход - к входу управляемого преобразователя.
| Двухкратноинтегрирующая система подчиненного регулирования скорости привода | 1973 |
|
SU479208A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гарнов В.К., Рабинович В.Б | |||
| и Вишневецкий Л.М | |||
| Унифицированные системы автоуправления электроприводом в металлургии | |||
| -М.: Металлургия, 1971, с | |||
| Крутильная машина для веревок и проч. | 1922 |
|
SU143A1 |
