2. Устройство по п. 1, о т л и чающееся тем, чт задатчик уровня скорости содержит три масштабных блока, два сумматора и три блока сравнения, первые входы которых объединены и являются первым входом задатчика, второй вход которого соединен с вторыми входами блоков сравнения, причем с первым блоком сравнения - непосредственно,- с вторым
и третьим - через соответствующие масштабные блоки, а через третий масштабный блок - с первым входом первого сумматора, второй вход которого подключен к выходу первого блока сравнения, входы второго сумматора соединены с выходами второго и третьего блоков сравнения, выходы сумматоров являются выходами задатчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Устройство для точного останова электропривода | 1984 |
|
SU1182618A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Система автоматического управления главными приводами реверсивного прокатного стана | 1988 |
|
SU1581398A1 |
| Устройство для точного останова электропривода | 1988 |
|
SU1614086A2 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство автоматического управления скоростью прокатного стана | 1984 |
|
SU1205954A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
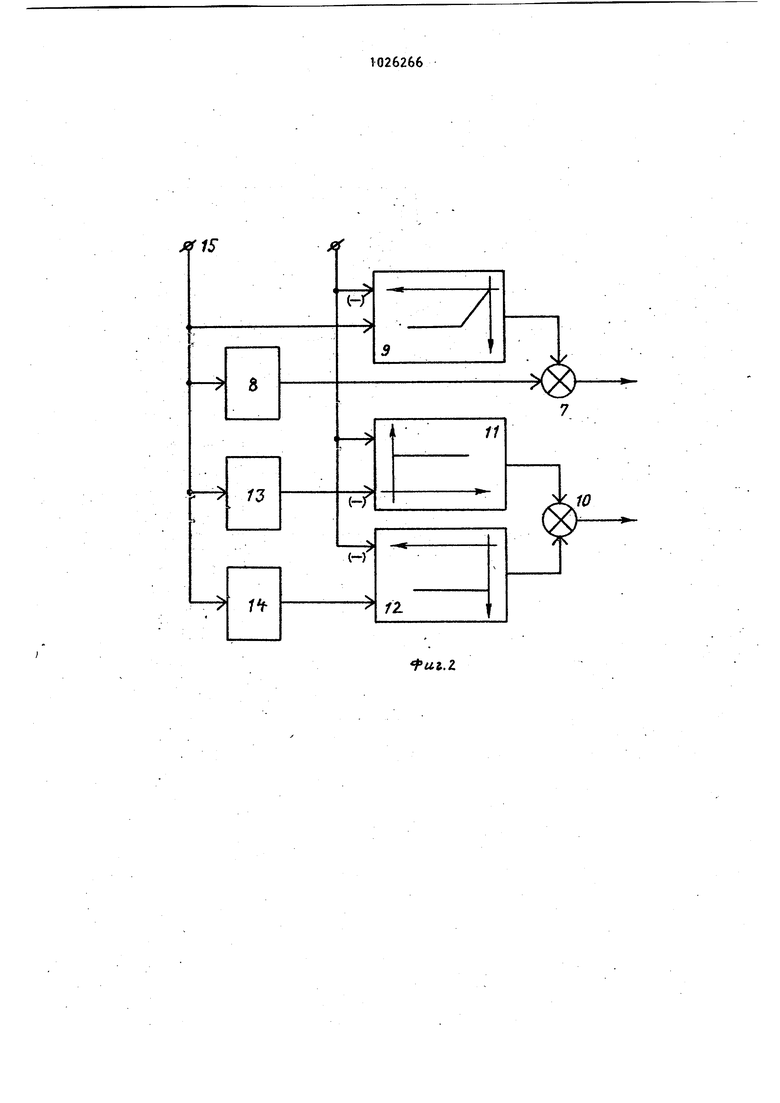
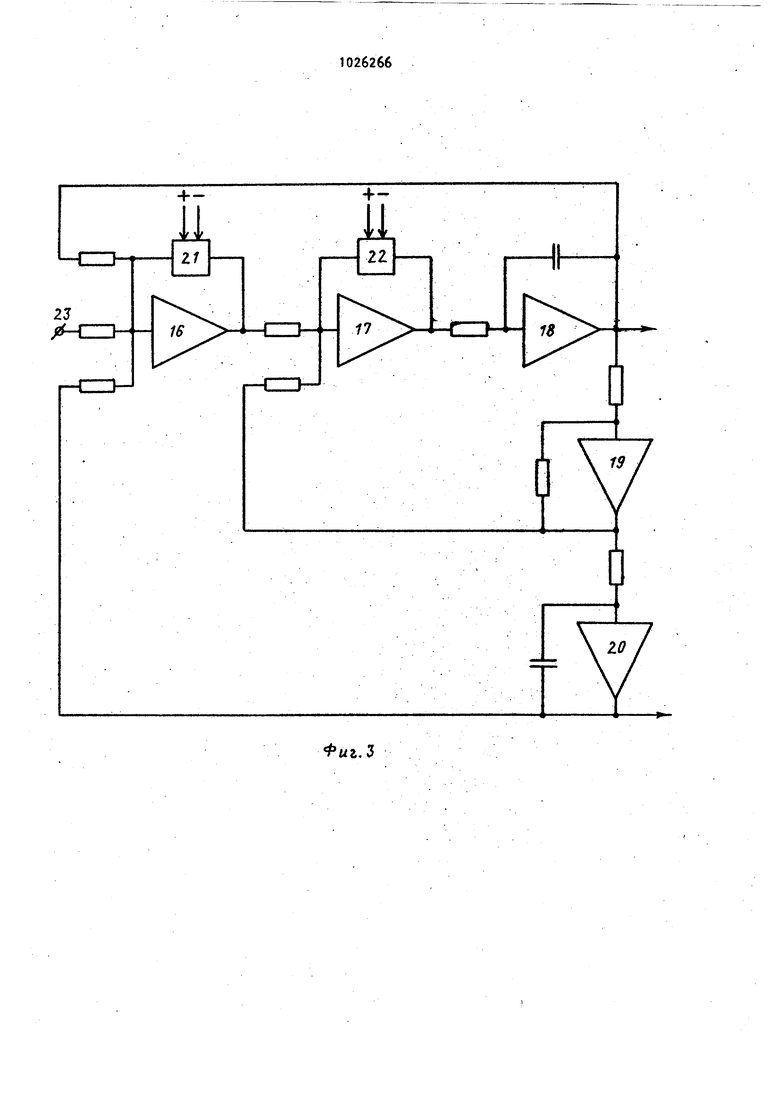
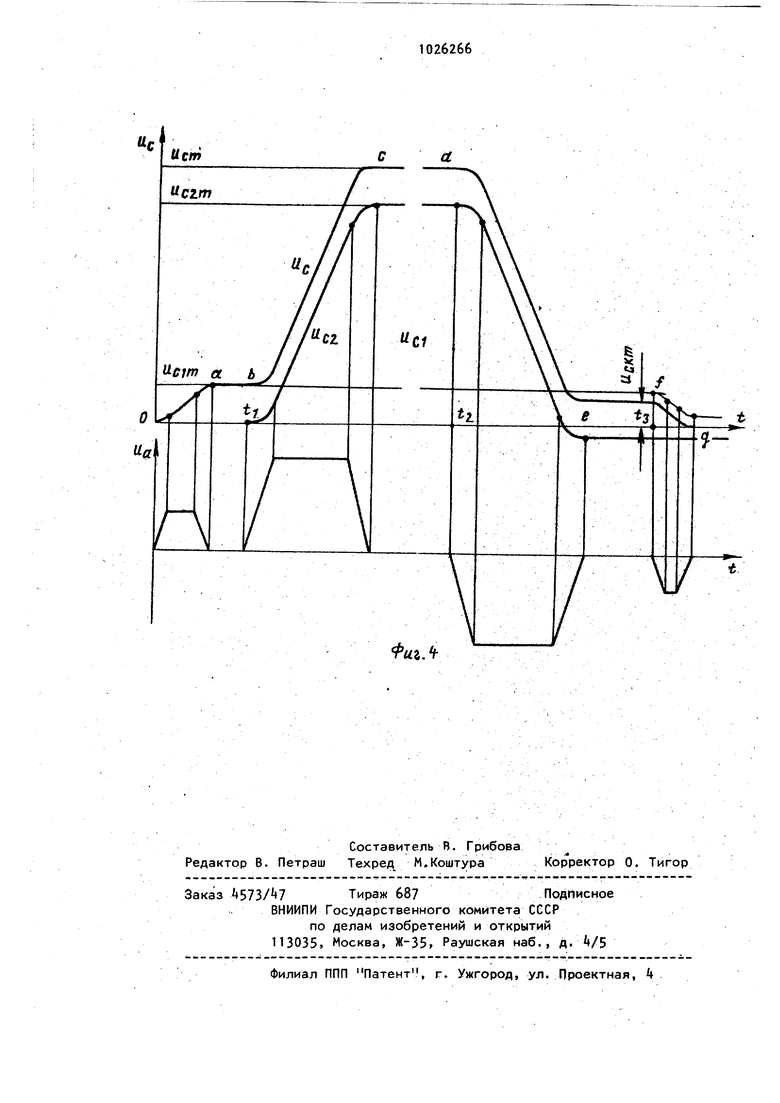
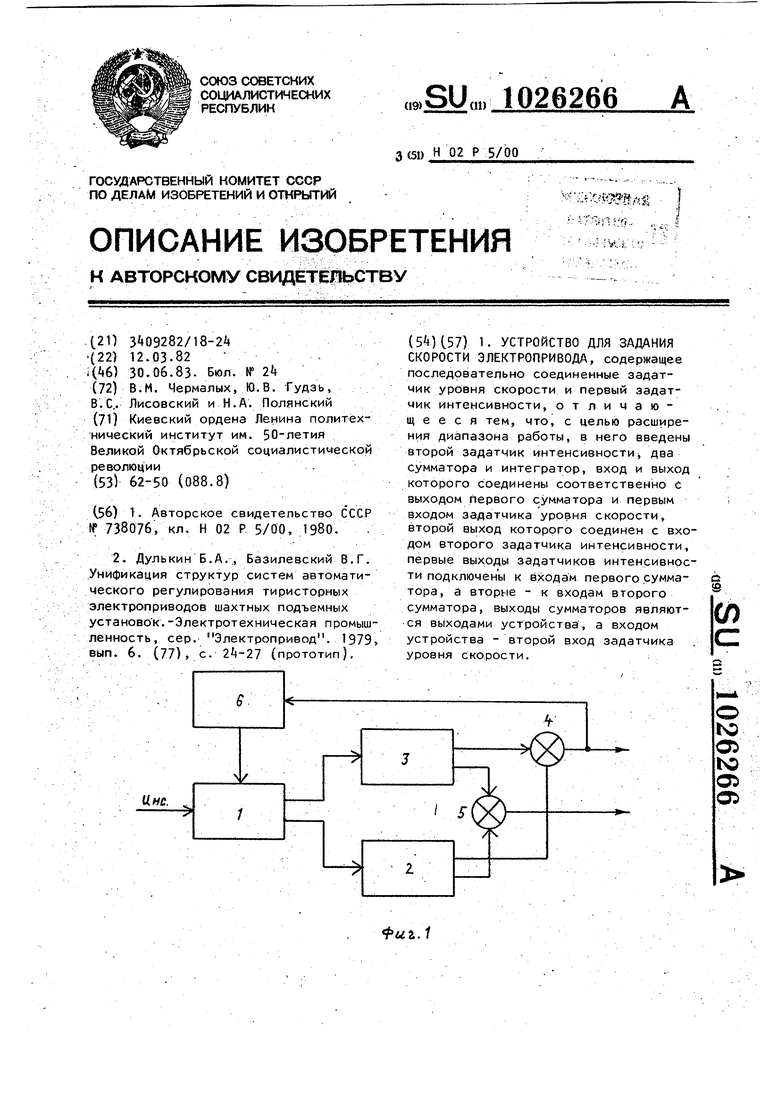
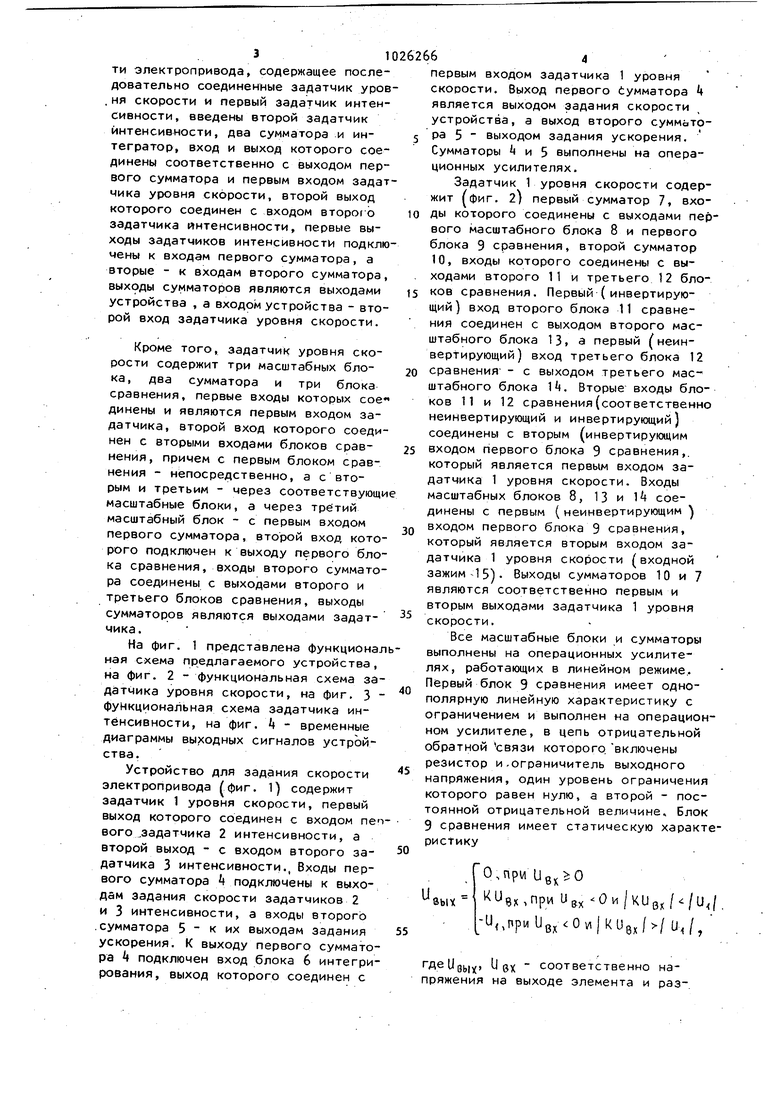
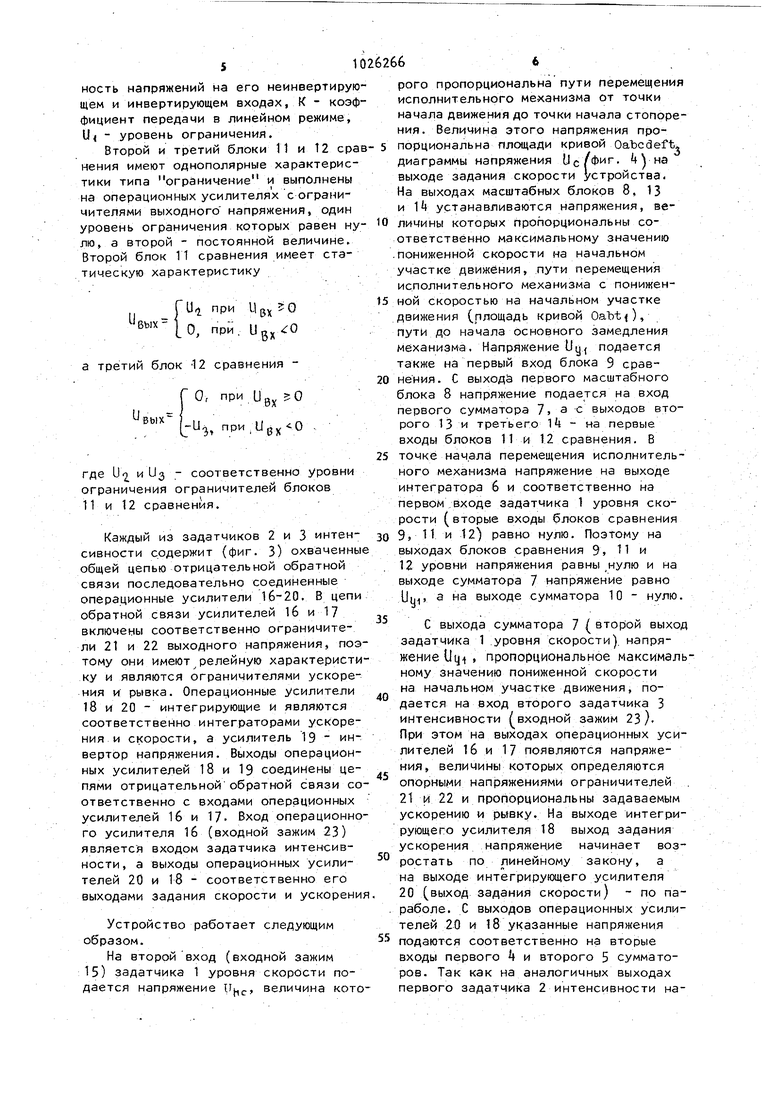
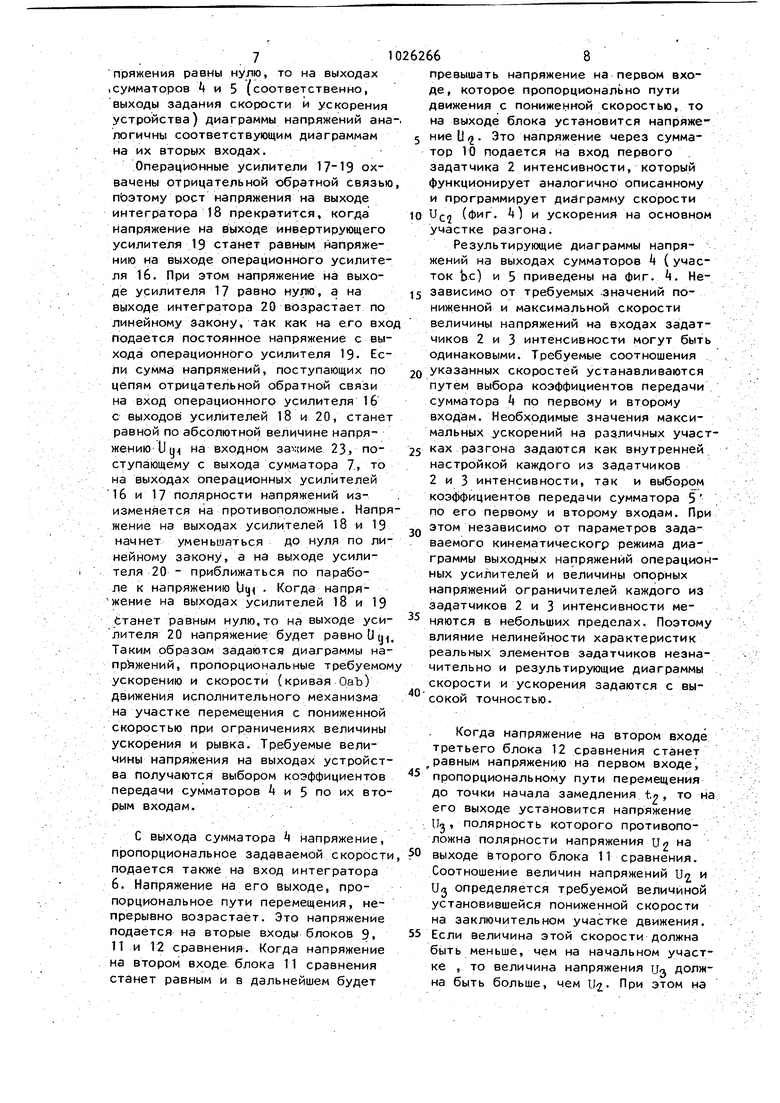
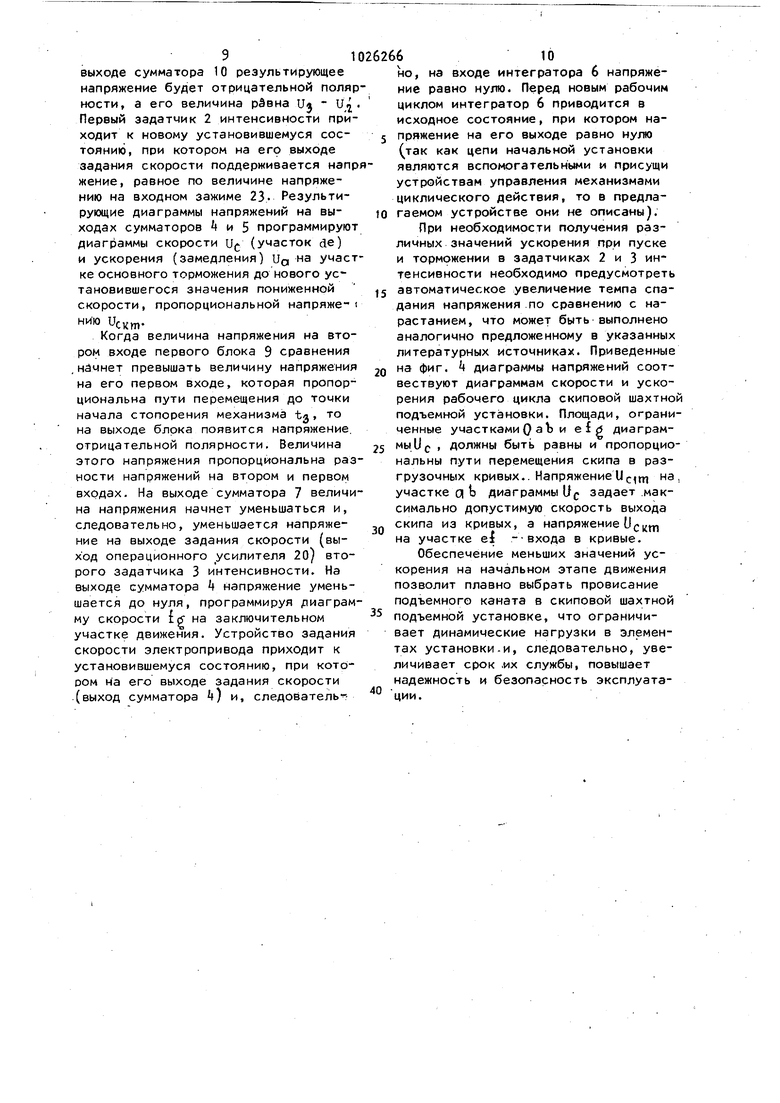
Изобретение относится к устройств управления электрическими двигателями и может быть использовано для формирования задающих воздействий в системах управления механизмами циклического действия с многопериод ными диаграммами скорости, преимущественно скиповыми шахтными подъем ными установками. Известно устройство задания скорости электропривода, содержащее последовательно соединенные операционный усилитель с устройством oi- раничения напряжения, основные и до полнительные цепи задания скорости изменения выходного напряжения и интегрирующий усилитель, охваченные через инвертирующий усилитель цепью отрицательной обратной связи. Цепи задания переключаются ключевым элементами, входные цепи которых подключены к выходам двух последних усилителей устройства l . Устройстве обеспечивает формиров ние многопериодных диаграмм скороети, но не формирует диаграммы с промежуточными установившимися пониженными значениями скорости, что необходимо для некоторых механизмов например для скиповых шахтных подъе ных установок на участках движения скипа в разгрузочных кривых. Устрой ство не обеспечивает ограничения ве личины рывка на участках основного разгона и замедления, что может при вести к повышенным динамическим нагрузкам в элементах и узлах исполнительного механизма. Наиболее близким по технической сущности к предлагаемому является устройство для задания скорости эле тропривода, содержащее последовательно соединенные блок задания уровня скорости и задатчик интенсивности, состоящий из охваченных обдей цепью отрицательной обратной связи пяти последовательно соединенных операционных усилителей: первого и второго с ограничителями выходного напряжения, третьего и пятого - интегри-i руюцих, четвертого - инвертора напряжения, При этом выходы третьего и четвертого усилителей соединены цепями отрицательной.обратной связи соответственно с входами первого и второго 2 . Ввиду нелинейности характеристик реальных элементов задатчика интенсивности невозможно получить с высокой точностью заложенный в нем закон изменения выходного напряжения при существенно отличающихся значениях входного напряжения. В области малых напряжений начинают сказываться внутренние нелинейности элементов устройства и диаграмма выходного напряжения задается с искажением формы; Данное устройство не обеспечивает задание различных ускорений при разгоне до промежуточного значения скорости и на основном участке до максимальной скорости, а также различных замедлений на аналогичных участках движения при торможении. - Цель изобретения - расширение диапазона работы путем формирования с высокой точностью многопериодных диаграмм скорости с участками различных ускорений. Указанная цель достигается тем, что в устройство для задания скороети электропривода, содержащее последовательно соединенные задатчик уров ,ня скорости и первый задаучик интенсивности, введены второй задатчик интенсивности, два сумматора и интегратор, вход и выход которого соединены соответственно с выходом первого сумматора и первым входом задат мика уровня скорости, второй выход которого соединен с входом второг о задатчика интенсивности, первые выходы задатчиков интенсивности подклю чены к входам первого сумматора, а вторые - к входам второго сумматора выходы сумматоров являются выходами устройства , а входом устройства - вто рой вход задатчика уровня скорости. Кроме того, задатчик уровня скорости содержит три масштабных блока, два сумматора и три блока сравнения, первые входы которых сое динены и являются первым входом задатчика, второй вход которого соеди нен с вторыми входами блоков сравнения, причем с первым блоком сравнения - непосредственно, а с вторым и третьим - через соответствующ масштабные блоки, а через третий масштабный блок - с первым входом первого сумматора, второй вход кото рого подключен к выходу первого бло ка сравнения, входы второго суммато ра соединены с выходами второго и третьего блоков сравнения, выходы сумматоров являются выходами задатчика. На фиг. 1 представлена функциона ная схема предлагаемого устройства, на фиг. 2 - функциональная схема за датЧика уровня скорости, на фиг. з функциональная схема задатчика интенсивности, на фиг. Ц - временные диаграммы выходных сигналов устройства. Устройство для задания скорости электропривода (фиг. 1) содержит задатчик 1 уровня скорости, первый выход которого соединен с входом пе вого .задатчика 2 интенсивности, а второй выход - с входом второго задатчика 3 интенсивности., Входы первого сумматора j подключены к выходам задания скорости задатчиков 2 и 3 интенсивности, а входы второго .сумматора 5 - к их выходам задания ускорения. К выходу первого суммато ра k подключен вход блока 6 интегри рования, выход которого соединен с первым входом задатчика 1 уровня скорости. Выход первого Сумматора 4 является выходом задания скорости устройства, а выход второго суммьтора 5 - выходом задания ускорения. Сумматоры и S выполнены на операционных усилителях. Задатчик 1 уровня скорости содержит (фиг. 2) первый сумматор 7, входы которого соединены с выходами первого масштабного блока 8 и первого блока 9 сравнения, второй сумматор 10, входы которого соединены с выходами второго 11 и третьего 12 блоков сравнения. Первый ( инвертирующий) вход второго блока 11 сравнения соединен с выходом второго масштабного блока 13, а первый (неинвeptиpyющий) вход третьего блока 12 сравнения - с выходом третьего масштабного блока 1 i. Вторые входы блоков 11 и 12 сравнения(соответственно неинвертирующий и инвертирующий) соединены с вторым (инвертирующим входом первого блока 9 сравнения,, который является первым входом задатчика 1 уровня скорости. Входы масштабных блоков 8, 13 и I соединены с первым (неинвертирующим ) входом первого блока 9 сравнения, который является вторым входом задатчика 1 уровня скорости (входной зажим 15). Выходы сумматоров 10 и 7 являются соответственно первым и вторым выходами задатчика 1 уровня скорости. Все масштабные блоки и сумматоры выполнены на операционных усилителях, работающих в линейном режиме. Первый блок 9 сравнения имеет однополярную линейную характеристику с ограничением и выполнен на операционном усилителе, в цепь отрицательной обратной связи которого, включены резистор и.ограничитель выходного напряжения, один уровень ограничения которого равен нулю, а второй - постоянной отрицательной величине. Влок 9 сравнения имеет статическую характерисгику0,npMUg O и9х,прииз, Ои/кид,,/ -и,,прми8 Ои),/, где11д(,|у, U бк соответственно напряжения на выходе элемента и разность напряжений на его неинвертирую щем и инвертирующем входах, К - коэф фициент передачи в линейном режиме, U - уровень ограничения. Второй и третий блоки 11 и 12 сра нения имеют однополярные характеристики типа ограничение и выполнены на операционных усилителях с ограничителями выходного напряжения, один уровень ограничения которых равен ну лю, а второй - постоянной величине. Второй блок 11 сравнения имеет статическую характеристику а третий блок 12 сравнения О, при f-U Ue,0 где и2 и УЗ - соответственно уровни ограничения ограничителей блоков 11 и 12 сравнения. Каждый из задатчиков 2 и 3 интенсивности содержит (фиг. 3) охваченны общей цепью отрицательной обратной связи последовательно соединенные операционные усилители 16-20. В цепи обратной связи усилителей 1б и 17 включены соответственно ограничители 21 и 22 выходного напряжения, поэ тому они имеют релейную характеристи ку и являются ограничителями ускорения и рывка. Операционные усилители 18 и 20 - интегрирующие и являются соответственно интеграторами ускорения и скорости, а усилитель 19 - инвертор напряжения. Выходы операционных усилителей 18 и 19 соединены цепями отрицательной обратной связи со ответственно с входами операционных усилителей 16 и 17- Вход операционно го усилителя 16 (входной зажим 23) является входом задатчика интенсивности, а выходы операционных усилителей 20 и 18 - соответственно его выходами задания скорости и ускорени Устройство работает следующим образом. На второй вход (входной зажим 15) задатчика 1 уровня скорости подается напряжение и, величина кото рого пропорциональна пути перемещения исполнительного механизма от точки начала движения до точки начала стопорения. Величина этого напряжения пропорциональна площади кривой Oabcdeft, диаграммы напряжения Uc/Фиг. на выходе задания скорости устройства. На выходах масштабных блоков 8, 13 и 1i устанавливаются напряжения, величины которых пропорциональны соответственно максимальному значению пониженной скорости на начальном участке движения, пути перемещения исполнительного механизма с пониженной скоростью на начальном участке движения (площадь кривой Oabt), пути до начала основного замедления механизма. Напряжение Uy подается также на первый вход блока 9 сравнения. С выходи первого масштабного блока 8 напряжение подается на вход первого сумматора 7 ас выходов второго 13 и третьего 1 - на первые входы блоков 11 и 12 сравнения. В точке начала перемещения исполнительного механизма напряжение на выходе интегратора 6 и соответственно на первом входе задатчика 1 уровня скорости (вторые входы блоков сравнения 9, 11 и 12) равно нулю. Поэтому на выходах блоков сравнения 9, 11 и 12 уровни напряжения равны нулю и на выходе сумматора 7 напряжение равно Uui 3 43 выходе сумматора 10 - нулю. с выхода сумматора 7 ( второй выход задатчика 1 уровня скорости), напряжение Utji , пропоОциональное максимальному значению пониженной скорости на начальном участке движения, подается на вход второго задатчика 3 интенсивности входной зажим 23), При этом на выходах операционных усилителей 16 и 17 появляются напряжения, величины которых определяются опорными напряжениями ограничителей 21 и 22 и пропорциональны задаваемым ускорению и рывку. На выходе интегрирующего усилителя 18 выход задания ускорения напряжение начинает возростать по пинейному закону, а на выходе интегрирующего усилителя 20 (выход задания скорости) - по параболе. С выходов операционных усилителей 20 и 18 указанные напряжения подаются соответственно на вторые входы первого k и второго 5 сумматоров. Так как на аналогичных выходах первого задатчика 2 интенсивности на71пряжения равны нулю, то на выходах .сумматоров Л и 5 (соответственно, выходы задания скорости и ускорения устройства) диаграммы напряжений ана логичны соответствующим диаграммам на их вторых входах. Операционные усилители 17-19 охвачены отрицательной обратной связью пЬэтому рост напряжения на выходе интегратора 18 прекратится, когда напряжение на выходе инве ртируюи1его усилителя 19 станет равнь(м напряжению на выходе операционного усилителя 16. При этом напряжение на выходе усилителя 17 равно нулю, а на выходе интегратора 20 возрастает По линейному закону, так как на его вхо подается постоянное напряжение с выхода операционного усилителя 19. Если сумма напряжений, поступающих по цепям отрицательной обратной связи на вход операционного усилителя 16 с выходов усилителей 18 и 20, станет равной по абсолютной величине напря жению Uyi на входном захчиме 23 поступающему с выхода сумматора 7, то на выходах операционных усилителей 16 и 17 полярности напряжений изизменяется на противоположные. Напря жение на выходах усилителей 18 и 19 начнет уменьшаться до нуля по линейному закону, а на выходе усилителя 20 - приближаться по параболе к напряжению llyv . Когда напряжение на выходах усилителей 18 и 19 Станет равным нулю,то на выходе усилителя 20 напряжение будет равно Uyi Таким образам задаются диаграммы наПрНжений, пропорциональные требуемом ускорению и скорости (кривая ОаЪ) движения исполнительного механизма; на участке перемещения с пониженной скоростью при ограничениях величины ускорения и рывка. Требуемые величины напряжения на выходах устройства получаются выбором коэффициентов передачи сумматоров и 5 по их вторым входам. С выхода сумматора напряжение, пропорциональное задаваемой скорости подается также на вход интегратора 6. Напряжение на его выходе, пропорциональное пути перемещения, непрерывно возрастает. Это напряжение подается на вторые входы блоков 9, 11 и 12 сравнения. Когда напряжение на втором входе, блока 11 сравнения станет равным и в дальнейшем будет 6 превышать напряжение на первом входе, которое пропорционально пути движения с пониженной скоростью, то на выходе блока установится напряжение U12 Это напряжение через сумматор 10 подается на вход первого задатчика 2 интенсивности, который функционирует аналогично описанному и программирует диаграмму скорости UGJ (фиг. и ускорения на основном участке разгона. Результирующие диаграммы напряжений на выходах сумматоров 4 {участок be) и 5 приведены на фиг. k. Независимо от требуемых .значений пониженной и максимальной скорости величины напряжений на входах задатчиков 2 и 3 интенсивности могут быть одинаковыми. Требуемые соотношения указанных скоростей устанавливаются путем выбора коэффициентов передачи сумматора j по первому и второму входам. Необходимые значения максимальных ускорений на различных участках разгона задаются как внутренней настройкой каждого из задатчиков 2 и 3 интенсивности, так и выбором коэффициентов передачи сумматора Sпо его первому и второму входам. При этом независимо от параметров задаваемого кинематическогр режима диаграммы выходных напряжений операционных усилителей и величины опорных напряжений ограничителей каждого из задатчиков 2 и 3 интенсивности меняются в небольших пределах. Поэтому влияние нелинейности характеристик реальных элементов задатчиков незначительно и результирующие диаграммы скорости и ускорения задаются с высокой точностью. Когда напряжение на втором входе третьего блока 12 сравнения станет равным напряжению на первом входеi пропорциональному пути перемещения до точки начала замедления t, то на его выходе установится напряжение Uj, полярность которого противоположна полярности напряжения и2 из выходе второго блока 11 сравнения. Соотношение величин напряжений и и Uj определяется требуемой величиной установившейся пониженной скорости на заключительном участке движения. Если величина этой скорости должна быть меньше, чем на начальном участке , то величина напряжения ти должна быть больше, чем При этом на выходе сумматора 10 результирующее напряжение будет отрицательной поля ности, а его величина рЗвна Ui Un Первый эадатчик 2 интенсивности при ходит к новому установившемуся состоянию, при котором на его выходе задания скорости поддерживается напр жение, равное по величине напряжению на входном зажиме 23. Результирующие диаграммы напряжений на выходах сумматоров t и 5 программируют диаграммы скорости U( (участок de) и ускорения (замедления) Ufj на участ ке основного торможения до нового установившегося значения пониженной скорости, пропорциональной напряжению UcKmКогда величина напряжения на втором входе первого блока 9 сравнения .начнет превышать величину напряжения на его первом входе, которая пропорциональна пути перемещения до точки начала стопорения механизма tg, то на выходе блока появится напряжение, отрицательной полярности. Величина этого напряжения пропорциональна раз ности напряжений на втором и первом входах. На выходе сумматора 7 величи на напряжения начнет уменьшаться и, следовательно, уменьшается напряжение на выходе задания скорости (выход операционного усилителя 20) второго задатчика 3 интенсивности. На выходе сумматора t напряжение уменьшается до нуля, программируя диаграм му скорости itf на заключительном участке движения. Устройство задания скорости электропривода приходит к установившемуся состоянию, при котором на его выходе задания скорости (выход сумматора i) и, следователь-но, на входе интегратора 6 напряжение равно нулю. Перед новым рабочим циклом интегратор 6 приводится в исходное состояние, при котором напряжение на его выходе равно нулю так как цепи начальной установки являются вспомогательными и присущи устройствам управления механизмами циклического действия, то в предлагаемом устройстве они не описаны). При необходимости получения различных значений ускорения при пуске и торможении в задатчиках 2 и 3 интенсивности необходимо предусмотреть автоматическое увеличение темпа спадания напряжения по сравнению с нарастанием, что может быть выполнено аналогично предложенному в указанных литературных источниках. Приведенные на фиг. диаграммы напряжений соотвествуют диаграммам скорости и ускорения рабочего цикла скиповой шахтной подъемной установки. Площади, ограниченные участками О аЪ и efd диаграммы U , должны быть равны и пропорциональны пути перемещения скипа в разгрузочных кривых.. Напряжение на, участке а Ь диаграммы U задает максимально допустимую скорость выхода скипа из кривых, а напряжение на участке ef --входа в кривые. Обеспечение меньших значений ускорения на начальном этапе движения позволит плавно выбрать провисание подъемного каната в скиповой шахтной подъемной установке, что ограничивает динамические нагрузки в элементах установки.и, следовательно, увеличивает срок ,их службы, повышает надежность и безопасность эксплуатации.
fui.i
