другой торец - с силовой гидролииией гидромашины.
4. Система по п.3, отличающая с я тем, что она снабжена дополнительным драсселем, электромеханическим преобразователем и элементом сопло-заслонка, сопло которого подключено к подпружиненному торцу первого ограничителя давления и через дополнительный дроссель - к силовой гидролинии гидромашины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления расходом | 1980 |
|
SU1038627A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1989 |
|
RU1732737C |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| Электрогидравлический усилитель мощности | 1990 |
|
SU1712678A1 |
| СЛЕДЯЩИЙ ГИДРОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТА | 1984 |
|
SU1228395A1 |
| ЧЕТЫРЕХЛИНЕЙНЫЙ ТРЕХПОЗИЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С РЕЗЕРВИРОВАННЫМ ЭЛЕКТРОУПРАВЛЕНИЕМ ПРИВОДА ПОВОРОТА КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДЕМПФЕРОМ | 2007 |
|
RU2342283C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| Гидравлический привод | 1989 |
|
SU1672010A1 |
1. СИСТЕМА УПРАВЛЕНИЯ РЕГУЛИРУЕМОЙ ГИДРОМАШИНОЙ, содержащая гидроцилиндр со штоком и поршнем, разделяющим поршневую и штоковую полости, электромеханический преобразователь с поворотным якорем, механизм обратной связи по положению регулирующего органа гидромашины, плавающее сопло, распределительный золотник с полостями, разделенными пояском, взаимодействую1цим с проточкой, выполненной в его гильзе, два дросселя, золотниковый ограничитель давления, поясок которого взаимодействует с проточкой, выполненной в его гильзе, и элемент сопло-заслонка , заслонка которого соединена с якорем, а сопло подключено через один дроссель к источнику давления управления и непосредственно к одному торцу распределительного золотника, к другому торцу которого подключено плавающее сопло, и через другой дроссель источник давления управления, одна полость распределительного золотника соединена со сливом, а другая - с источником давления управления и штоковой полостью гидроцилиндра, связанного штоком с регулирующим органом и с механизмом обратной связи, соединенным с якорем, а ограничитель давления с одного торца соединен с силовой гидролинией гидромашины, а с другого торца подпружинен регулируемой пружиной, отличающаяся тем, что, с целью повьш1ения устойчивости, S золотник ограничителя давления выполнен с тремя поясками и размещен в гильзе с образованием первой и второй полостей, разделенных пояском, взаимодействующим с проточкой, которая подключена к поршневой полости гидроцилиндра, а первая полость ограничителя давления соединена с проточкой распределительного зо00 лотника. со 2.Система поп.1, отличаю щаяся тем, что подпружиненный торец и вторая полость ограничителя оо давления соединены со сливом. 3.Система по п.1, отличающаяся тем, что, с целью расширения функциональных возможностей, она снабжена вторым золотниковым ограничителем давления, проточка которого соединена с второй полостью первого ограничителя давления, первая полость и подпружиненный торец соединены со сливом, вторая полость с источником давления управления, а
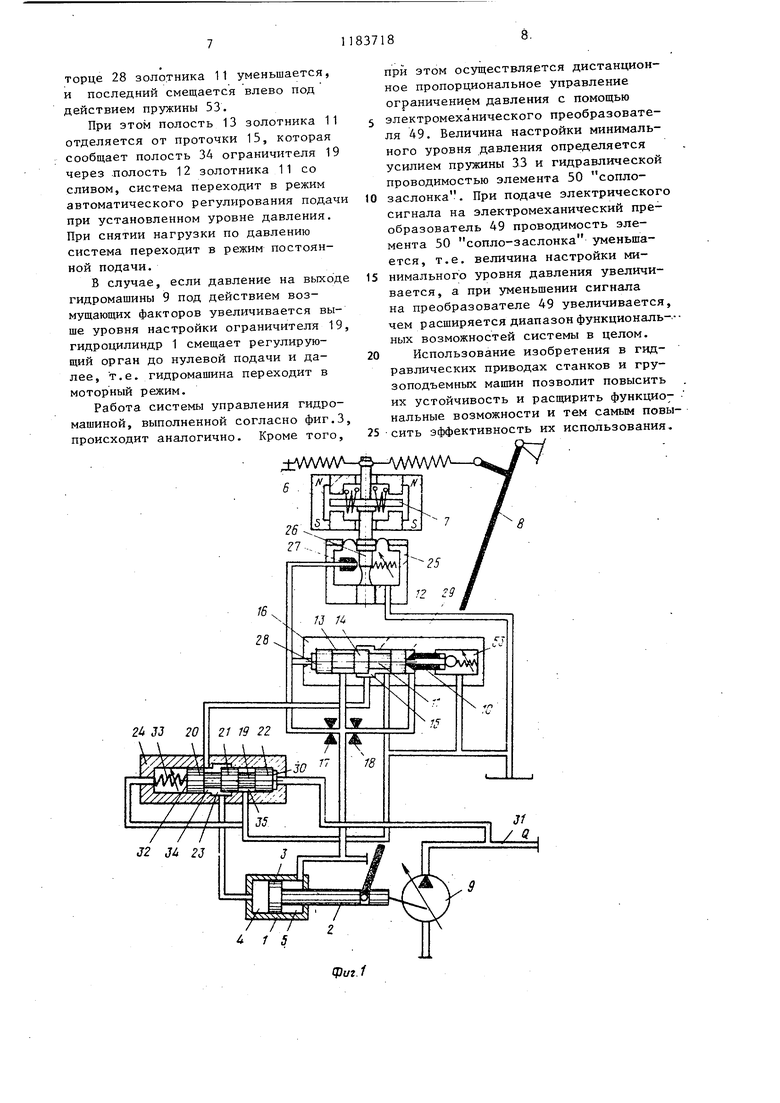
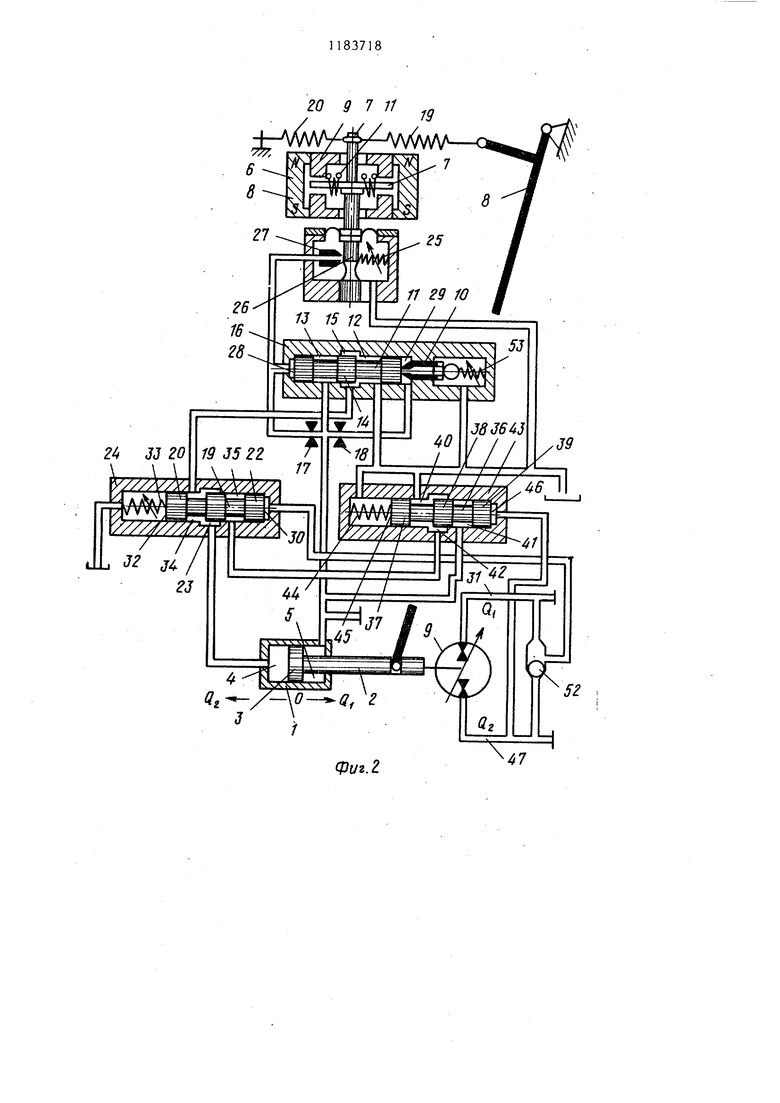
Изобретение относится к гидроавто матике и может быть использовано в гидравлических приводах станков и грузоподъемных машин. Известна система управ;.ения регулируемой гидромашиной, содержащая гидроцилиндр со штоком и поршнем, разделяющим поршневую и штоковую полости, электромеханический преобразователь с поворотным якорем, механизм обратной связи по положению регулирующего органа гидромашины, распределительный золотник с полостя ми, .разделенными пояском, взаимодействующим с проточкой, выполненной в его гильзе, два -дросселя и элемент сопло-заслонка, заслонка которого соединена с якорем, а сопло подключено через один из дросселей к источ нику давления управления и непосредственно к одному из торцов распределительного золотника, полости которого связаны с полостями гидроцилиндра СО. Недостатком этой системы является низкое качество динамических характеристик из-за отсутствия ограничения давления в процессе регулирования. Известна также система управления регулируемой гидромашиной,содержащая гидроцилиндр со штоком и поршнем,разде ляющим поршневую и штоковую полости, электромеханический преобразователь с поворотным якорем, механизм обратной связи по положению регулирукщего органа гидромашины, плавающее сопло, распределительный золотник с полостями, разделенными пояском, взаимодействующим с проточкой, выполненной в его гильзе, два дросселя, золотниковый ограничитель давления, поясок которого взаимодействует с проточкой выполненной в его гильзе, и элемент сопло-заслонка, заслонка которого Соединена с якорем, а сопло подключено через один дроссель к источнику давления управления и непосредственно к одному торцу распределительного золотника, к другому торцу которого подключено плавающее сопло и через другой дроссель источник давления управления, одна полость распределительного золотника соединена со сливом, а другая - с источником давления управления и штоковой полостью гидр оцилиндра, связанного штоком с регулирующим органом и с механизмом обратной связи,, соединенным с якорем, а ограничитель давления с одного торца соединен с силовой гидролинией гидромашины, а с другого торца подпружинен регулируемой пружиной 23. Недостатками известной системы являются низкая устойчивость в процессе поддержания давления из-за отсутствия непосредственной связи между ограничителем давления и гидроцилиндром и узость функциональных возможностей вследствие того, что исключена возможность дистанционного пропорционального управления уровнем давления. Цель изобретения - повьш1ение устойчивости и расширение функциональных возможностей. Указанная цель достигается тем, что в системе управления регулируемой гидромашиной, содержащей гидроцилиндр со штоком и поршнем, разделяющим поршневую и штоковую полости, электромеханический преобразователь с поворотным якорем, механизм обратной связи цо положению регулирующего органа гидромашины, плавающее сопло, распределительный золотник с полостями, разделенными пояском, взаимодействующим с проточкой, выполненной в его гильзе, два дросселя, золотниковый ограничитель давЛенин, поясок которого взаимодействует с проточкой, выполненной в его гильзе, и элемент сопло-заслонка , заслонка которого соединена с якорем, а сопло подключено через один дроссель к источнику давления управ ления и непосредственно к одному торцу распределительного золотника, к другому торцу которого подключено плавающее сопло, и через другой дро сель источник давления управления, одна полость распределительного золотника соединена со сливом, а другая - с источником давления управле ния и штоковой полостью гидроцилинд ра, связанного штоком с регулирующим органом и с механизмом обратной связи, соединенным с якорем, а ограничитель давления с одного торца со динен с силовой линией гидромашины, а с другого торца подпружинен регулируемой пружиной, золотник ограничителя давления выполнен с тремя поясками и размещен в гильзе с образованием первой и второй полостей, разделенных пояском, взаимодействующим с проточкой, которая подключена к поршневой полости гидроцилиндрн, а первая полость ограничителя давления соединена с проточкой распределительного золотника. При этом подпружиненный торец и вторая полость ограничителя давления соединены со сливом. Кроме того, система может быть снабжена вторым золотниковым ограничителем давления, проточка которого соединена с второй полостью первого ограничителя давления, первая полост и подпружиненный торец соединены со сливом, вторая полость - с источником давления управления, а другой торец - с силовой гидролинией гидромашины. Причем, кроме этого, она может быть снабжена дополнительными дросселем, электромеханическим преобразователем и элементом сопло-заслонка, сопло которого подключено к под пружиненному торцу первого ограничйтеля давления и через дополнительный дроссель к силовой гидролинии гидромашины . На фиг.1 изображена схема системы управления нереверсивной гидромашиной с одним электромеханическим преобразователем и с одним ограничителем давления, на фиг.2 - схема системы управления реверсивной гидромашиной с одним электромеханическим преобразователем и двумя ограничителями давления; на фиг.З - то же, с двумя электромеханическими преобразователями и двумя ограничителями давления . Система содержит гидроцилиндр 1 со штоком 2 и поршнем 3, разделяющим поршневую 4 и штоковую 5 полости, электромеханический преобразователь 6 с поворотным якорем 7, механизм 8 обратной связи по положению регулирующего органа (не изображен) гидромашины 9, плавающее сопло 10, распределительный золотник 11 с полостями 12 и 13,разделенными пояском 14,взаимодействующим с проточкой 15,выполненной в его гильзе 16,дроссели 17 и 18, золотниковый ограничитель 19 давления, выполненный с тремя поясками 20-22, поясок 21 которого взаимодействует с проточкой 23, выполненной в его гильзе 24, и элемент 25 сопло-заслонка, заслонка 26 которого соединена с якорем 7, а сопло 27 подключено через дроссель 17 к источнику давления управления (не изображен) и непосредственно к торцу 28 золотника 11, к торцу 29 которого подключено сопло 10 и через дроссель 18 -, источник давления управления, полость 12 золотника 11 соединена со сливом, а полость 13 - с источником давления управления и полостью 5 гидроцилиндра 1, связанного штоком 2 с регулирующим органом и с механизмом 8, соединенным с якорем 7, а ограничитель 19 со стороны торца 30 соединен с силовой гидролинией 31 гидромашины 9, а со стороны торца 32 подпружинен регулируемой пружиной 33. Поясок 21 разделяет в гильзе 24 первую 34 и -вторую 35 полости ограничителя 19, проточка 23 подключена к поршневой полости 4 гидроцилиндра 1, а полость 34 соединена с проточкой 15 золотника 11. Торец 32 и полость 35 (фиг.1) ограничителя 19 соединены, со сливом. Система (фиг. 2 также снабжена торьм золотниковым ограничителем 361 авления с поясками 37-39, первой 40
и второй 41 полостями и проточкой 42, вьтолненной в его гильзе 43, проточка 42 соединена с полостью 35 ограничителя 19, полость 40 и подпру жиненный пружиной 44 торец 45 ограничителя 36 соединены со сливом, полость 41 - с источником давления управления, а торец 46 - с силовой гидролинией 47 гидромашины 9.
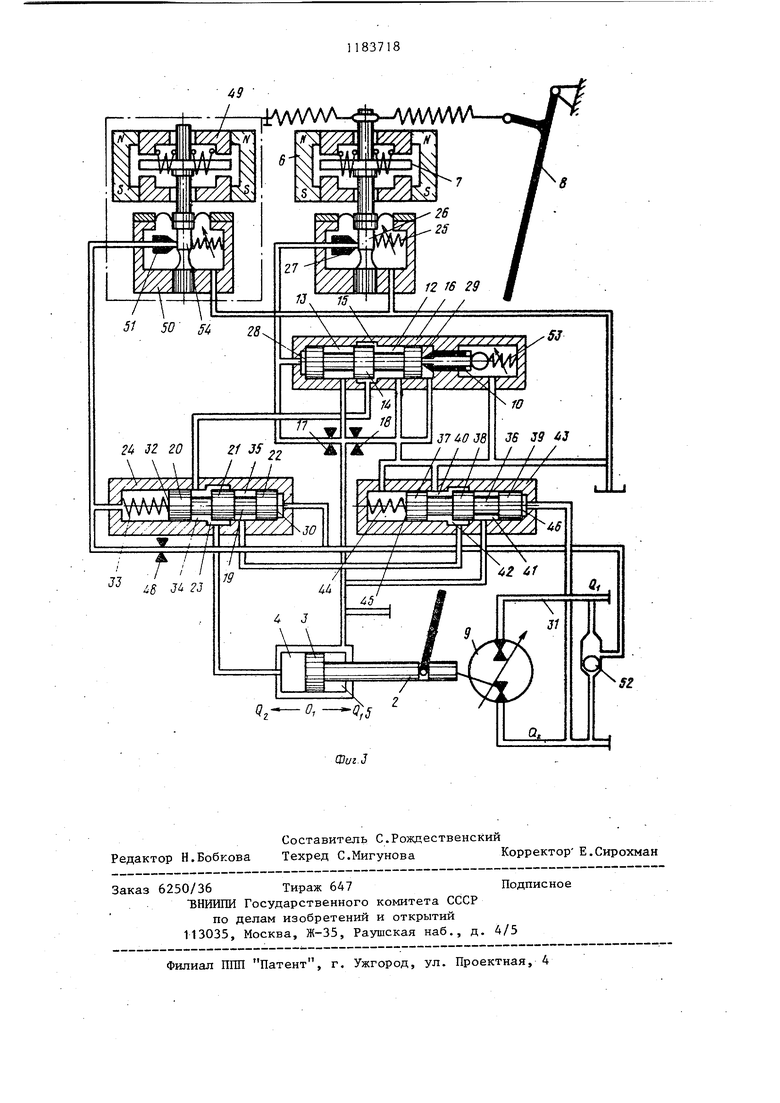
Система (фиг.З) снабжена дополнительными дросселем 48, электромеханическим преобразователем 49 и злемен- том 50 сопло-заслонка, сопло 51 которого подключено к торцу 32 ограничителя 19 и через дроссель 48 и клапан 52 к силовым гидролиниям 31 и 47. Сопло 10 подпружинено пружиной 53, сопло 51 взаимодействует с заслонкой 54.
Система управления регулируемой гидромашиной (фиг.1) работает следующим образом.
В исходном положении золотник 11 находится в крайнем левом положении и полость 4 гидроцилиндра 1 сообщена со сливом, регулирующий орган гидромашины 9 находится в положении, соответствующем нулевой подаче. Пос- . ле запуска привода гидромашины 9 и подачи давления .управления , при отсутствии сигнала на электромеханическом преобразователе 6,- подача также равна нулю. При поступлении электрического сигнала на электромеханический преобразователь 6, якорь 7 поворачивается и изменяет величину зазора между соплом 27 и заслонкой 26. Перепад давлений на торцах 28 и 29 золотника 11 изменяется, последний смещается на величину прямо пропорциональную площади и изменению перепада давлений на сопле 10 и обратно пропорциональную жесткости пруткины 53.
Величина давления в полости 4 гидроцилиндра 1 изменяется, шток 2 перемещает регулирующий орган гидромашины 9 до тех пор, пока величина усилия на якоре 7 от перемещения механизма 8 компенсирует величину электромагнитной силы на якоре 7. При этом ход штока 2 пропорционален величине электрического сигнала. В случае повьш1ения давления в гидролинии 31 ограничитель 19 смещается, полость 34 сообщается через проточку 23, образующую с пояском 21 дроссельный делитель, с полостью 35, давление в полости 4 гидроцилиндра
1уменьшается, шток 2 перемещает регулирующий орган в направлении уменьшения подачи, а механизм 8 уменьшает зазор между соплом 27 и заслонкой
26, перепад на торцах 28 и 29 золотника 14 увеличивается. Это приводит к смещению золотника 11 вправо и обеспечивает гарантированньй подвод рабочей жидкости к ограничителю 19. С этого момента действие механизма 8 обратной связи по положению не оказывает влияния на работу гидромашины 9, так как последний работает в режиме автоматического регулирования величины подачи при ограниченной величине давления на выходе, которая определяется величиной усилия пружины 3 3 .
При уменьшении нагрузки (давления в гидролинии 31) гидромашина 9 переходит в режим управления подачей.
Работа системы управления реверсивной гидромашиной (фиг.2) происходит аналогично описанному в том случае, если величина давления в силовых гидролиниях 31 и 47 не превьш1ает настройки ограничителя 19, при зтом переключения ограничителя 36 не влияют на работу системы. В случае, если силовая гидролиния 31 является нагнетающей, запорный элемент клапана 52 находится в нижнем (фиг.2) положении. При подаче входного сигнала на электромеханический преобразователь 6 заслонка 26 движется, .например, к соплу 27, шток 2 смещается вправо, устанавливая заданную величину подачи в гидролинию 31. В случае изменения полярности входного сигнала нагнетательной гидролинией является гидролиния 47, запорньй элемент клапана 52 находится в верхнем положении, а полость 35 ограничителя 19 сообщается с источником давления управления. При возрастании давления в гидролинии 47 вьш1е величины настройки ограничителя 19, последний смещается влево и полость 35 сообщается через проточку 23 с полостью 34. Давление в полости 4 гидроцилиндра 1 возрастает, и шток
2смещает регулирующий орган гидромашины 9 в сторону уменьшения подачи. При этом механизм 8 изменяет зазор между соплом 27 и заслонкой 26 в сторону его увеличения. Давление на торце 28 золотника 11 уменьшается, и последний смещается влево под действием пружины 53. При этом полость 13 золотника 11 отделяется от проточки 15, которая сообщает полость 34 ограничителя 19 через .полость 12 золотника 11 со сливом, система переходит в режим автоматического регулирования подач при установленном уровне давления. При снятии нагрузки по давлению система переходит в режим постоянной подачи. В случае, если давление на выход гидромашины 9 под действием возмущающих факторов увеличивается выше уровня настройки ограничителя 19 гидроцилиндр 1 смещает регулирующий орган до нулевой подачи и далее, т.е. гидромашина переходит в моторный режим. Работа системы управления гидромашиной, выполненной согласно фиг.З происходит аналогично. Кроме того ри этом осуществляется дистанционное пропорциональное управление ограничением давления с помощью электромеханического преобразователя 49. Величина настройки минимального уровня давления определяется усилием пружины 33 и гидравлической проводимостью элемента 50 соплозаслонка. При подаче электрического сигнала на электромеханический преобразователь 49 проводимость элемента 50 сопло-заслонка уменьшается, т.е. величина настройки минимального уровня давления увеличивается, а при уменьшении сигнала на преобразователе 49 увеличивается, чем расширяется диапазон функциональ--ных возможностей системы в целом. Использование изобретения в гидравлических приводах станков и грузоподъемных машин позволит повысить их устойчивость и расширить функцио7 нальные возможности и тем самым повысить эффективность их использования. го a.9 1 11 Qi Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ТАНК-ПАРОВОЗ | 1923 |
|
SU625A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления расходом | 1980 |
|
SU1038627A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
