Изобретение относится к гидроавтоматике и может быть использовано для привода рабочих органов строительных и дорожных машин, например погрузчиков.
Цель изобретения - повьшение КПД.
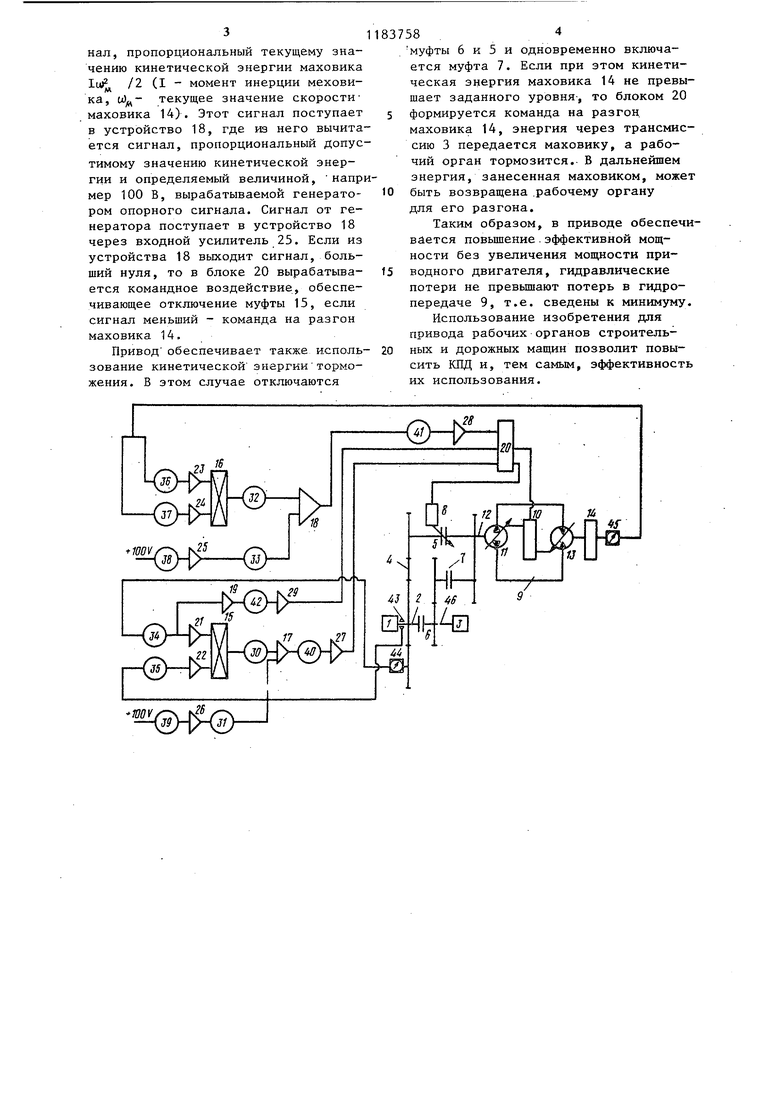
На чертеже изображена схема гидромеханического привода.
Привод содержит приводной двигатель 1, связанный валом 2 с объектом регулирования, например, трансмиссие 3, зубчатую передачу 4 с управляемой муфтой 5 и дополнительными управляемыми муфтами 6 и 7, механизм 8 управления муфтой 5, объемную гидропередачу 9 с .механизмом 10 регулирования , передающая гидромашина 11 которой связана своим валом 12 через передачу 4 и муфту 5 с двигателем 1. а исполнительная гидромашича 13 - с маховиком 14, а также систему автоматического контроля и управления, выполненную в виде первого 15 и второго 16 блоков умножения, первого 17 и второго 18 сравнивающих устройств, блока 19 дифференцирования, блока 20 формирования команд, входны усилителей 21 - 26 и выходных усилителей 27 - 29. На входах устройств
17и 18 установлены пе,ременные сопротивления. 30, 31 и 32,33, а на входах усилителей 21 - 29 - переменные согфотивления 34 - 42 соответственно.
Усилители 21 и 22 установлены на входах блока 15, усилители 23 и 24 на входах блока 16, усилители 25 и
26- на выходах генератора опорного сигнала (не изображен), а усилители
27- 29 - на выходах устройств 17,
18и блока 19 соответственно. При этом выход датчика 43 момента двигателя 1 соединен с одним из входов блока 15, выход датчика 44 скорости двигателя 1-е вторым входом блока
15 и с входом блока 19, выход которого связанч с блоком 20, выход блока 15 соединен с одним из входов устройства 17, к второму входу которого подключен выход генератора опорного сигнала, а выход связан с блоком 2(1, зькод датчика 45 скорости маховика 14 соединен с обоими входами блока 16, выход которого соединен-с одним из входов устройства 18, к второму входу которого подключен выход генератора опорного сигнала, а выход связан с блоком 20, соединенным с механизмами 8.и 10 и механизмами
(не показаны; управления муфт 6 и 7. Муфта 6 установлена между валом 2 и валом 46 объекта регулирования, а муфта 7 - между валом 46 и валом 12. Трансмиссия 3 соединена с рабочим органом (не изображен).
Гидромеханический привод работает следующим образом.
Если нагрузка, передаваемая через трансмиссию 3, постоянна и соответствует номинальной нагрузке двигателя 1, то последний воспринимает ее через муфту 6. Если нагрузка двигателя 1 меньше номинальной, то сигналы датчиков 43 и 44 через усилители 21 и 22 попадают в блок 15 умножения, на выходе которого формируется сигнал, пропорциональный мощности двигателя 1 МW (где М - крутящий момент, uj скорость двигателя 1). На выходе устройства 17 появится сигнал, равный разности сигналов, пропорциональных текущему значению мощности двигателя 1 и номинальному его значению .Мц и) , (где MU - номинальный крутящий момент
из - номинальная скорость), определяемому величиной, например 100 В, вырабатываемой генератором опорного сигнала и поступающей в устройство 17 через входной усилитель 26, Если эта разность меньше нуля, то в блоке 20 вырабатывается командное воздействие, обеспечивающее включение муфты 5 и разгон маховика 14. Разгон обеспечивается увеличением рабочего объема гидромашины 11 и уменьшением рабочего объема гидромашины 13. Аналогичная операция имеет место в динамике при увеличении частоты вращения вала 2 двигателя 1, когда блок 19 дифференцирования вырабатывает положительную величину производной скорости (частоты вращения) . Если блок 19 дифференцирования вырабатывает отрицательную величину производной, то обеспечивается торможение маховика 14 (рабочий объем гидромашины 11 уменьшается, рабочий объем гидромашины 13 увеличивается) и энергия маховика 14 переходит на вал 2 двигателя 1. Для контроля за величиной кинетической энергии маховика 14, которая не должна превьш1ать определенного задания уровня, датчик 45 ч0рез входные усилители 23 и 24 подает сигнал в блок 16 умножения, где посредством переменных сопротивлений 36 и 37 формируется сиг
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИСПЫТАНИЙ И ОБКАТКИ | 2004 |
|
RU2267761C1 |
| РЕКУПЕРАТИВНАЯ РЕВЕРСИВНАЯ БЕССТУПЕНЧАТАЯ ГИДРОТРАНСМИССИЯ КОЛЕСНОЙ МАШИНЫ | 2003 |
|
RU2259928C2 |
| Способ управления электрической станцией, содержащей асинхронный генератор и источник реактивной мощности | 1991 |
|
SU1815735A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU998526A1 |
| УСТРОЙСТВО ДЛЯ НАТЯЖЕНИЯ КАНАТА В СУДОВЫХ СРЕДСТВАХ ПЕРЕДАЧИ ГРУЗОВ В МОРЕ (ВАРИАНТЫ) | 2014 |
|
RU2578636C1 |
| Устройство для регулирования частоты вращения вала | 1986 |
|
SU1317404A2 |
| СПОСОБ РЕКУПЕРАЦИИ ЭНЕРГИИ ГИДРОПРИВОДА ПОВОРОТНОЙ ПЛАТФОРМЫ ЭКСКАВАТОРА | 2016 |
|
RU2618154C1 |
| МЕХАНИЗМ КОТОВСКОВА БЛОКИРОВКИ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221949C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
ГВДРОМЕХАНИЧЕСКИЙ ПРИВОД, содержащий приводной двигатель, связанный валом с объектом регулирования, зубчатую передачу с управляемой муфтой, механизм управления муфтой, объемную гидропередачу с механизмом регулирования, передающая гидромашина которой связана своим валом через зубчатую передачу и управляемую муфту с приводным двигателем, а исполнительная гидромашина - с маховиком, а также систему автоматического контроля и управления, подключенную входами к генератору опорного сигнала и датчику скорости приводного двигателя, а выходами - к механизму управления муфты и механизму регулирования гидропередачи, отличающийся тем, что, с целью повышения КПД, привод снабжен двумя дополнительными управляемыми муфтами, датчиком скорости маховика и датчиком момента приводного двигателя, а система автоматического контроля управления выполнена в виде первого и второго блоков умножения, первого и второго сравнивающих устройств, блока дифференцирования, блока формирования команд, шести входных и трех выходных усилителей, причем на входе каждого усилителя и на входах сравнивающих устройств установлены переменные сопротивления, входные усилители установлены на входах блоков умножения и на выходах генератора опорного сигнала, а выходные усилители - на выходах сравнивающих устройств и блока дифференцирования, при этом выход датчика момента соединен с одним из входов первого блока умножения, выход датчика скорости S5 приводного двигателя - с другим входом первого блока умножения и входом блока дифференцирования, выход которого связан с блоком формирования команд, выход первого блока умножения соединен с одним из входов первого сравнивающего устройства, к другому входу которого подключен выход генератора опорного сигнала, а выход 00 СлЭ связан с блоком формирования команд, выход датчика скорости маховика динен с обоими входа{ 1и второго блока сл умножения, выход которого соединен с 00 одним из входов второго сравнивающего устройства, к другому входу которого подключен выход генератора опорного сигнала, а выход связан с блоком формирования команд, соединенным с механизмом регулирования гидропередачи и механизмами управления муфт, одна допол1нительная муфта установлена между валами приводного двигателя и объекта регулирования, а другая - между валом последнего и валом передающей гидромашины.
| Больших А.Ч | |||
| и др | |||
| Испытательная техника, ч | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Синхронизирующее устройство для аппарата, служащего для передачи изображений на расстояние | 1920 |
|
SU225A1 |
| Пуговица | 0 |
|
SU83A1 |
| Устройство для автоматического поддержания стабильной частоты вращения синхронного генератора | 1979 |
|
SU855298A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
