Изобретение относится к судостроению, в частности к устройствам натяжения каната в судовых канатных дорогах, предназначенных для передачи грузов в море.
Известны лебедки, предназначенные для сооружения канатных дорог и передачи различных сухих и жидких грузов между кораблями и судами. Особенностью этих лебедок является необходимость обеспечения определенного натяжения канатных линий в условиях постоянно меняющейся по причине качки длины канатной дороги.
Традиционно привод лебедки осуществляется гидромоторами от удаленно расположенной гидростанции с гидроаккумуляторами, соединенной трубопроводами высокого давления с лебедкой.
Известно тросонатяжное устройство (а.с. СССР №1255560, МПК B63B 27/30, опубликовано 07.09.1986 г.), содержащее тросовый барабан и аккумулятор энергии в виде маховика, связанные между собой объемной регулируемой гидропередачей, включающей в себя нерегулируемую и регулируемую объемные гидромашины, связанные между собой магистралями, причем регулируемая объемная гидромашина связана с блоком автоматического регулирования, приспособление для зарядки аккумулятора, выполненное в виде двигателя, насаженного на вал маховика и снабженного автоматическим выключателем, а блок автоматического регулирования включает в себя гидроцилиндр двустороннего действия с подпружиненным нуль-установителем, сообщенный посредством золотникового гидрораспределителя непрерывного действия с магистралями объемной гидропередачи.
Недостатком данного устройства являются ограниченные возможности по управлению движением и натяжением троса и значительные габариты обеспечивающей гидравлической системы.
Известно канатно-натяжное устройство для судового средства передачи грузов в море (а.с. СССР №1321629, МПК B63B 27/30, опубликовано 07.07.1987 г.), содержащее канатный барабан с канатом на нем, соединенный посредством регулируемой передачи с аккумулятором энергии, выполненным в виде маховика. В регулируемую гидропередачу входят гидромашина, на вал которой насажен барабан, и регулируемая обжимная гидромашина, на валу которой также расположены маховик и двигатель. Гидромашины связаны между собой гидромагистралями, между которыми расположен предохранительный клапан. Наклонная шайба при помощи зубчатого колеса и зубчатой рейки связана с блоком, а к другому концу рейки прикреплена пружина, предварительная деформация которой может регулироваться передачей винт-гайка.
Недостатком данного устройства являются ограниченные возможности по управлению движением и натяжением каната и значительные габариты обеспечивающей гидравлической системы.
Известно устройство для натяжения троса в судовых средствах передачи грузов в море (а.с. СССР №1341095, МПК B63B 27/30, опубликовано 30.09.1987 г.), содержащее тросовой барабан с тросом. Барабан с регулируемой гидропередачей оснащен блоком автоматического регулирования давления и соединен с аккумулятором, выполненным в виде маховика. Гидропередача включает регулируемую объемную гидромашину, соединенную с маховиком, и нерегулируемую машину. Механизм управления давлением кинематически связан с тросовым барабаном и содержит зубчатую передачу, муфту и винт, регулирующий величину поджатия пружины золотника.
Основным недостатком данного устройства являются ограниченные возможности по управлению движением и натяжением троса и значительные габариты обеспечивающей гидравлической системы.
Задачей изобретения является обеспечение надежной и экономичной передачи грузов по канатной линии между двумя движущимися судами в море.
Техническим результатом изобретения является расширение возможностей управления движением каната и усилием его натяжения, а также повышение надежности устройства, уменьшение габаритов и упрощение конструкции устройства для натяжения каната.
Указанный технический результат достигается устройством для натяжения каната в судовых средствах передачи грузов в море, выполненным в двух вариантах.
Согласно первому варианту устройство для натяжения каната в судовых средствах передачи грузов в море содержит канатный барабан, установленный в опорах, оснащенных датчиками усилия натяжения каната, и соединенный с первым электродвигателем, оснащенным первым датчиком углового положения и первым электротормозом, канатоукладчик, связанный со вторым электродвигателем, оснащенным вторым датчиком углового положения и вторым электротормозом, блок управления, связанный с первым и вторым электродвигателями, первым и вторым датчиками углового положения и с первым и вторым электротормозом, а также с датчиками усилия натяжения каната, причем канат канатного барабана кинематически связан с канатоукладчиком.
По второму варианту устройство для натяжения каната в судовых средствах передачи грузов в море содержит канатный барабан, установленный в опорах, оснащенных датчиками усилия натяжения каната, и соединенный с электродвигателем, оснащенным датчиком углового положения и электротормозом, канатоукладчик, связанный с канатным барабаном механической передачей, блок управления, связанный с электродвигателем, датчиком углового положения и с электротормозом, а также с датчиками усилия натяжения каната, причем канат канатного барабана кинематически связан с канатоукладчиком.
По обоим вариантам канатный барабан дополнительно оснащен механическим тормозом.
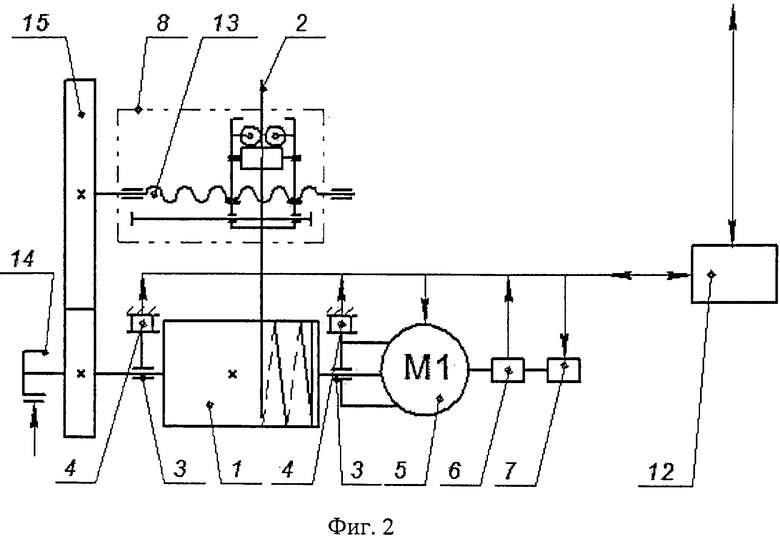
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена функциональная схема устройства для натяжения каната по первому варианту, на фиг. 2 изображена функциональная схема устройства для натяжения каната по второму варианту.
Устройство для натяжения каната по первому варианту в случае передачи вращения на канатоукладчик посредством второго электродвигателя (фиг. 1) содержит канатный барабан 1 с канатом 2. Барабан 1 вращается в опорах 3, оснащенных датчиками усилия натяжения каната 4. Барабан 1 приводится во вращение от тихоходного первого электродвигателя 5, оснащенного первым датчиком углового положения 6 и первым электротормозом 7. Канат 2 проходит через канатоукладчик 8, приводимый в движение от тихоходного второго электродвигателя 9, оснащенного вторым датчиком углового положения 10 и вторым электротормозом 11. Электродвигатели 5 и 9 с электротормозами 7 и 11 соответственно управляются от блока управления 12. Блок управления 12 получает данные об усилии натяжения каната 2 от датчиков 4, о текущем угловом положении электродвигателей 5 и 9 от датчиков 6 и 10 соответственно. Устройство натяжения каната управляется при помощи команд, передаваемых в блок управления 12 по цифровому интерфейсу от внешней системы управления более высокого уровня (на чертеже не обозначено). В обратном направлении блок управления 12 передает информацию о текущих значениях усилия натяжения каната 2 и угловых положениях барабана 1 и канатоукладчика 8. Второй электродвигатель 9 соединен с механизмом канатоукладчика 8 через вал 13. На канатном барабане дополнительно может быть установлен механический тормоз 14.
Устройство для натяжения каната по второму варианту в случае передачи вращения на канатоукладчик посредством механической передачи (фиг. 2) содержит канатный барабан 1 с канатом 2. Барабан 1 вращается в опорах 3, оснащенных датчиками усилия натяжения каната 4. Барабан 1 приводится во вращение от тихоходного электродвигателя 5, оснащенного датчиком углового положения 6 и электротормозом 7. Канат 2 проходит через канатоукладчик 8, приводимый в движение от канатного барабана 1 с помощью механической передачи 15 и вала 13. Электродвигатель 5 с электротормозом 7 управляется от блока управления 12. Блок управления 12 получает данные об усилии натяжения каната 2 от датчиков 4, о текущем угловом положении электродвигателя 5 от датчика 6. Устройство натяжения каната управляется при помощи команд, передаваемых в блок управления 12 по цифровому интерфейсу от внешней системы управления более высокого уровня (на чертеже не обозначено). В обратном направлении блок управления 12 передает информацию о текущих значениях усилия натяжения каната 2 и угловых положениях барабана 1. На канатном барабане дополнительно установлен механический тормоз 14.
В первом варианте исполнения устройство работает следующим образом.
В исходном положении канат 2 намотан на барабане 1 и пропущен через механизм канатоукладчика 8, электротормоза 7 и 11 заблокированы в неподвижном положении. При поступлении команды от внешней системы управления о необходимом движении каната 2 на определенную длину, либо обеспечении определенного усилия натяжения каната 2, блок управления 12 рассчитывает необходимые для этого параметры вращения барабана 1. Далее по команде блока управления 12 электротормоза 7 и 11 разблокируются, и электродвигатели 5 и 9 начинают согласованную работу, приводя во вращение барабан 1 и механизм канатоукладчика 8 соответственно. В процессе вращения барабана данные от датчиков углового положения 6 и 10 передаются в блок управления 12 и обеспечивают слежение за исполнением команды. Данные от датчиков усилия натяжения каната 4 обрабатываются блоком управления 12 и вместе с данными о текущем угловом положении барабана 1 передаются внешней системе управления. Блок управления 12 также контролирует данные о натяжении каната с целью предотвращения аварийной перегрузки системы. После завершения движения каната 2 на желаемую длину, заданную углом положения барабана 1, блок управления 12 останавливает электродвигатели 5 и 9 и блокирует дальнейшее движение электротормозами 7 и 11, либо начинает исполнение следующей команды от внешней системы управления. Цикл управления завершен.
Предлагаемое устройство, в зависимости от получаемых команд и выбранного алгоритма управления, обеспечивает произвольное управление натяжением и движением каната 2.
По второму варианту исполнения устройство работает следующим образом.
В исходном положении канат 2 намотан на барабане 1 и пропущен через механизм канатоукладчика 8, электротормоз 7 заблокирован в неподвижном положении. При поступлении команды от внешней системы управления о необходимом движении каната 2 на определенную длину, либо обеспечении определенного усилия натяжения каната 2, блок управления 12 рассчитывает необходимые для этого параметры вращения барабана 1. Далее по команде блока управления 12 электротормоз 7 разблокируется, и электродвигатель 5 начинает вращение. В процессе движения данные от датчика углового положения 6 передаются в блок управления 12 и обеспечивают слежение за исполнением команды. Вращение барабана 1 через механическую передачу 15 передается на вал 13, приводя в движение механизм канатоукладчика 8. Данные от датчиков усилия натяжения каната 4 обрабатываются блоком управления 12 и вместе с данными о текущем угловом положении барабана 1 передаются внешней системе управления. Блок управления 12 также контролирует данные о натяжении каната с целью предотвращения аварийной перегрузки системы. После завершения движения каната 2 на желаемую длину, заданную углом положения барабана 1, блок управления 12 останавливает электродвигатель 5 и блокирует дальнейшее движение электротормозом 7, либо начинает исполнение следующей команды от внешней системы управления. Цикл управления завершен.
Дополнительный механический тормоз 14 (фиг. 1, 2) блокирует вращение барабана 1 при отключенном электропитании. При включенном электропитании он не мешает движению барабана 1.
Таким образом, предлагаемое устройство для натяжения каната в судовых средствах передачи грузов в море расширяет возможность управления движением каната и усилием его натяжения, а также повышает надежность устройства, уменьшает его габариты и упрощает конструкцию устройства для натяжения каната за счет замены гидравлического привода на электропривод.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1986 |
|
SU1341095A2 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
| Канатно-натяжное устройство для судового средства передачи грузов в море | 1985 |
|
SU1321629A1 |
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1981 |
|
SU958218A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1987 |
|
SU1416373A2 |
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1985 |
|
SU1252237A2 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
Изобретение относится к судостроению, в частности к устройствам натяжения каната в судовых канатных дорогах, предназначенных для передачи грузов в море. Устройство для натяжения каната в судовых средствах передачи грузов в море по первому варианту содержит канатный барабан в опорах, датчики усилия натяжения каната, первый электродвигатель с датчиком углового положения и электротормозом, канатоукладчик, второй электродвигатель с датчиком углового положения и электротормозом, блок управления. Канат канатного барабана кинематически связан с канатоукладчиком. Устройство для натяжения каната в судовых средствах передачи грузов в море по второму варианту содержит канатный барабан в опорах, датчики усилия натяжения каната, электродвигатель с датчиком углового положения и электротормозом, канатоукладчик, связанный с канатным барабаном механической передачей, блок управления. Канат канатного барабана кинематически связан с канатоукладчиком. Достигается расширение возможностей управления движением каната и усилием его натяжения, повышение надежности и упрощение конструкции устройства. 2 н. и 1 з.п. ф-лы, 2 ил.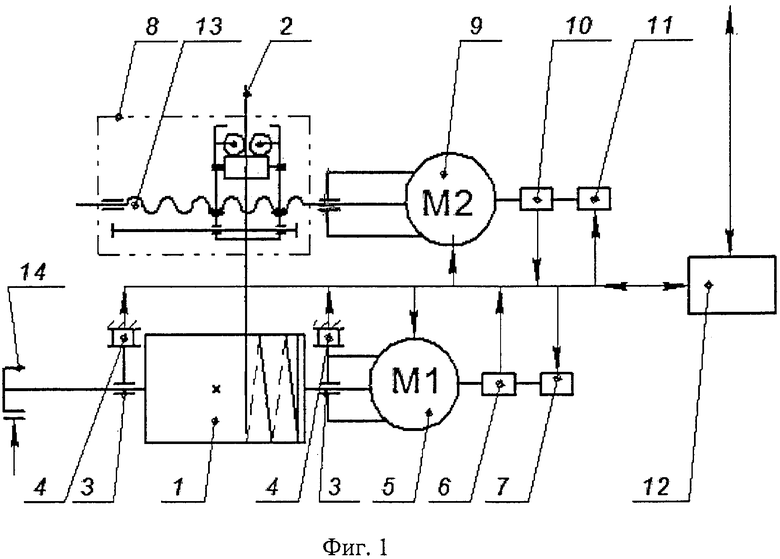
1. Устройство для натяжения каната в судовых средствах передачи грузов в море, содержащее канатный барабан, установленный в опорах, оснащенных датчиками усилия натяжения каната, и соединенный с первым электродвигателем, оснащенным первым датчиком углового положения и первым электротормозом, канатоукладчик, связанный со вторым электродвигателем, оснащенным вторым датчиком углового положения и вторым электротормозом, блок управления, связанный с первым и вторым электродвигателями, первым и вторым датчиками углового положения и с первым и вторым электротормозом, а также с датчиками усилия натяжения каната, причем канат канатного барабана кинематически связан с канатоукладчиком.
2. Устройство для натяжения каната в судовых средствах передачи грузов в море, содержащее канатный барабан, установленный в опорах, оснащенных датчиками усилия натяжения каната, и соединенный с электродвигателем, оснащенным датчиком углового положения и электротормозом, канатоукладчик, связанный с канатным барабаном механической передачей, блок управления, связанный с электродвигателем, датчиком углового положения и с электротормозом, а также с датчиками усилия натяжения каната, причем канат канатного барабана кинематически связан с канатоукладчиком.
3. Устройство для натяжения каната по п.1 или 2, отличающееся тем, что канатный барабан дополнительно оснащен механическим тормозом.
| Устройство для натяжения троса в судовых средствах передачи грузов в море | 1986 |
|
SU1341095A2 |
| Устройство траверзной передачи груза | 1984 |
|
SU1240680A1 |
| ЛЕБЕДКА | 2009 |
|
RU2401242C1 |
| JP 2005008321 A, 13.01.2005. | |||

