X)
:л
X)
:л
Изобретение относится к измерительной технике и геодезии и может быть использовано в различных отраслях народного хозяйства, гдт требуется определить угловое положение объекта относительно плоскости горизонта
Цель изобретения - повышение быстродействия устройства за счет исключения приведения электролитического уровня к плоскости горизонта перед началом измерения.
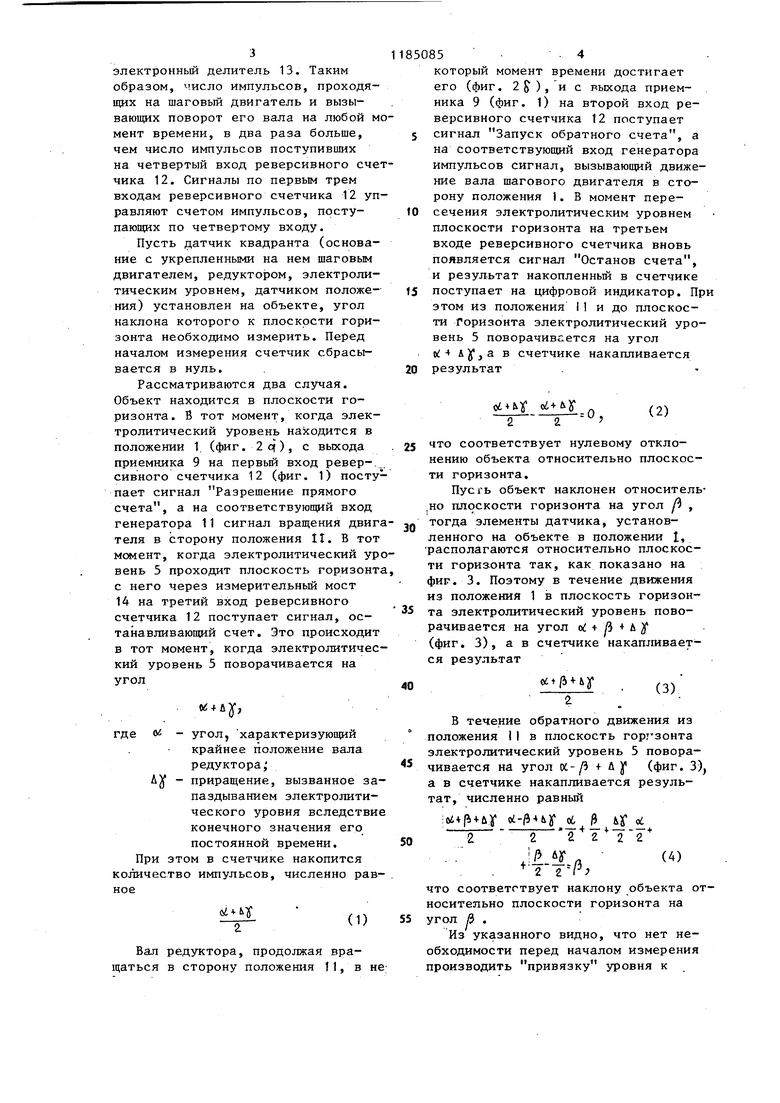
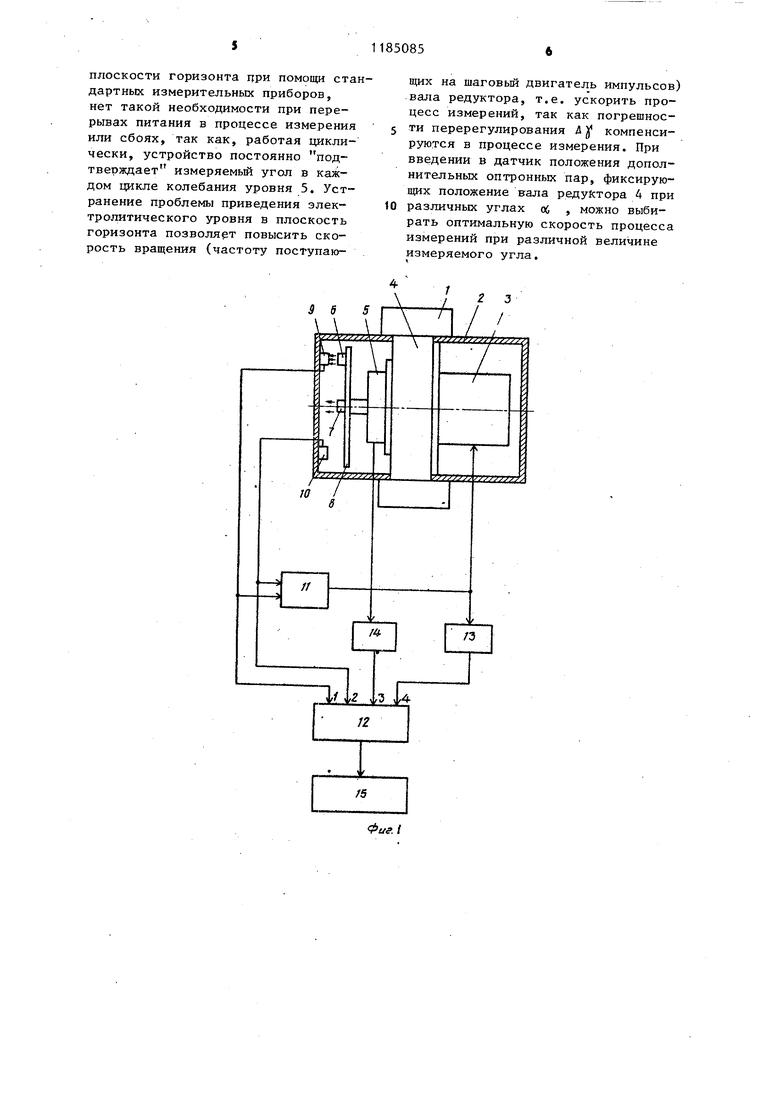
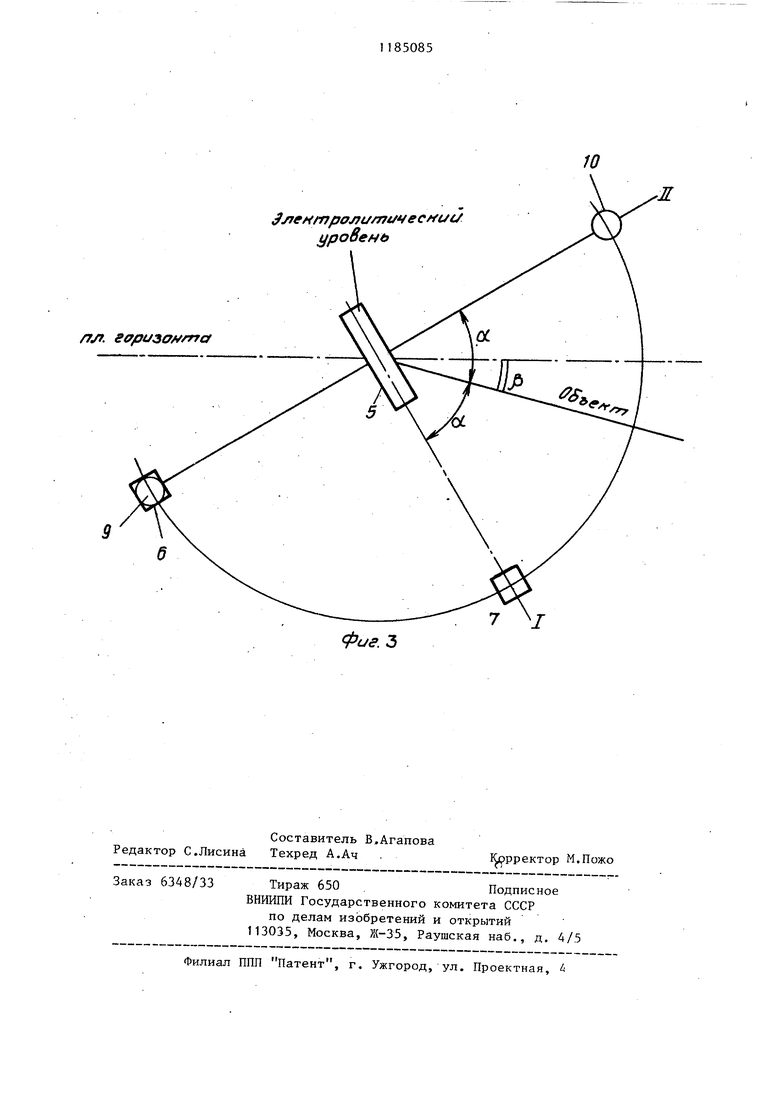
На фиг. 1 приведена функциональная блок-схема предлагаемого устройства, на фиг. 2 - схема взаимного расположения приемников, источников, датчика положения и электролитического уровня в крайних положениях I и 1I вала редуктора 4, на фиг. 3 - схема, поясняющая принцип, измерения угла предлагаемым устройством.
Квадрант содержит (фиг. 1) основание 1, жестко соединенньй с ним корпус 2, в котором установлены: реверсивный шаговый двигатель 3, вращение вала которого черед редуктор 4 передается электролитическому уровню 5, датчик положения вала редуктора 4, выполненный, например, по крайней мере из двух оптронных пар, излучатели 6 и 7, жестко закрепленные на валу редуктора 4 двигателя 3 с томощью диска 8, и приемники 9 и 10, жестко закрепленные на корпусе 2, выходы которых электрически соединены с генератором 1.1 импульсов и реверсивным счетчиком 12, а выход генератора 11 импульсов соединен с входом шагового двигателя 3 и через электронный делите;ть 13 - с четвертым входом реверсивного счетчика 12. Выход электрического уровня 5 через мостовую измерительную схему 14 соединен с третьим входом реверсивно-. го счетчика 12, Выход последнего соединен с входом цифрового индикатора 15. I
Квадрант работает следуюш 1М
образом.
Датчик положения способен зафиксировать два положения вала редуктора, связанного с валом шагового двигателя. Достижение валом редуктора .пюбого из этих положений сопрояожл,ается появлением сигнала на выходе приемника 9 и 10 в момент
образования соответствуюгцей оптронной пары (приемник 9 - излучатель 6 или приемник 10 - излучатель 7, (фиг. 2а, 8) . Приемники 9 и 10 (фиг. 1) жестко закреплены на корпусе 2, а излучатели 6 и 7 - на диске 8, установленном на валу редуктора 4 таким образом, что в тот момент, когда вал редуктора 4 находится в положении, изображенном на фиг. 2q , электролитический уровень 5, жестко укрепленный на оси редуктора 4, оказывается повернутым относительно плоскости горизонта на угол , а когда вал редуктора 4 находится в положении, изображенном на фиг. 28 , электролитический уровень 5 оказывается повернутым относительно плоскости горизонта на угол + «;.
Когда вал находится в положении i, на выходе приемника 9 (фиг. 1 и 2а) появляется сигнал, заставляющий двигаться вал шагового двигателя 3, а вместе с ним и вал редуктора 4. в положение i 1. Когда вал редуктора 4 достигает положения 1I, появляется, сигнал на выходе приемника 10 (фиг. 1 и 2 В ), заставляющий двигаться вал двигателя 3 в
положение i. Далее процесс повторяется. Таким образом, электролитический уровень совершает колебания около плоскости горизонта с амплитудой
od- И- k ,,
где 11 - число импульсов, вызывающих поворот шагового двигателя;
постоянный коэффициент, который определяют как частное от деления шага двигателя 3 на коэффициент редукции редуктора 4 и
который может быть выбран
равным, например, одной минуте.
В момент прохождения плоскости горизонта электролитический уровень 5 выдает сигнал Горизонт, который через измерительный мост 14 поступает на третий вход реверсивного . счетчика. На первый и второй вход реверсивного счетчика поступают сигналы с выхода приемников 9 и 10 датчика положения оси редуктора 4, а на четвертмй вход - импульсы с выхода генератора 11 импульсов через
3
электронный делитель 13. Таким образом, исло импульсов, проходящих на шаговый двигатель и вызывающих поворот его вала на любой момент времени, в два раза больше, чем число импульсов поступивших на четвертый вход реверсивного счетчика 12. Сигналы по первым трем входам реверсивного счетчика 12 управляют счетом импульсов, поступающих по четвертому входу.
Пусть датчик квадранта (основание с укрепленными на нем шаговым двигателем, редуктором, электролитическим уровнем, датчиком положения) установлен на объекте, угол наклона которого к плоскости горизонта необходимо измерить. Перед началом измерения счетчик сбрасывается в нуль.
Рассматриваются два случая. Объект находится в плоскости горизонта. В тот момент, когда электролитический уровень находится в положении 1. (фиг. 2q), с выхода приемника 9 на первьй вход ревер-. сивного счетчика 12 (фиг. 1) поступает сигнал Разрешение прямого счета, а на соответствующий вход генератора 11 сигнал вращения двигателя в сторону положения II. В тот момент, когда электролитический уровень 5 проходит плоскость горизонта с него через измерительный мост 14 на третий вход реверсивного счетчика 12 поступает сигнал, останавливающий счет. Это происходит в тот момент, когда электролитический уровень 5 поворачивается на угол
«4Ajf,
угол, характеризующий крайнее положение вала редуктора;
- приращение, вызванное запаздыванием электролитического уровня вследствие конечного значения его постоянной времени. этом в счетчике накопится тво импульсов, численно раведуктора, продолжая врав сторону положения 11, в не;
5085.4
который момент времени достигает его (фиг. 2J), и с рыхода приемника 9 (фиг. 1) на второй вход реверсивного счетчика 12 поступает 5 сигнал Запуск обратного счета, а на соответствующий вход генератора импульсов сигнал, вызывающий движение вала шагового двигателя в сторону положения 1. В момент переfO сечения электролитическим уровнем плоскости горизонта на третьем входе реверсивного счетчика вновь появляется сигнал Останов счета, и результат накопленный в счетчике
15 поступает на цифровой индикатор. При этом из положения I1 и до плоскости Горизонта электролитический уровень 5 поворачивается на угол 0 4 А у, а в счетчике накапливается
0 результат
oi+ьУ
(2)
гО
что соответствует нулевому отклонению объекта относительно плоскости горизонта.
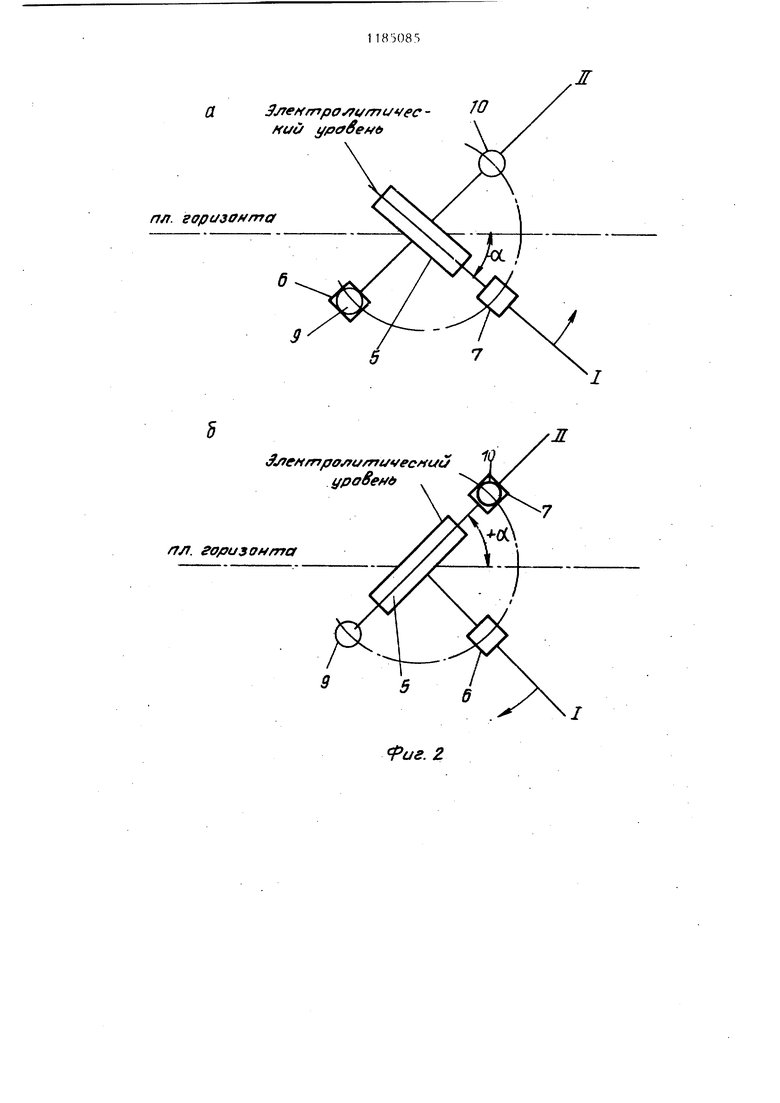
Пусть объект наклонен относитель,но плоскости горизонта на угол f , тогда элементы датчика, установленного на объекте в положении 1, располагаются относительно плоскости горизонта так, как показано на фиг. 3. Поэтому в течение движения из положения 1 в плоскость горизонта электролитический уровень поворачивается на угол od + /3 + Л У (фиг. 3), а в счетчике накапливается результат
40
(3)
В течение обратного движения из положения I I в плоскость горг-зонта электролитический уровень 5 поворачивается на угол (Х-/3 + А у (фиг. 3) а в счетчике накапливается результат, численно равный
ot ьУ об 2 2 2 2 2 2
(4) 22Р
что соответствует наклону объекта относительно плоскости горизонта на угол S .
Из указанного видно, что нет необходимости перед началом измерения производить привязку уровня к
плоскости горизонта при помощи стадартных измерительных приборов, нет такой необходимости при перерывах питания в процессе измерения или сбоях, так как, работая циклически, устройство постоянно подтверждает измеряемый угол в каждом цикле колебания уровня 5. Устранение проблемы приведения электролитического уровня в плоскость горизонта позволяет повысить скорость вращения (частоту поступаю-
щих на шаговый двигатель импульсов вала редуктора, т.е. ускорить процесс измерений, так как погрешности перерегулирования 4 компенсируются в процессе измерения. При введении в датчик положения дополнительных оптронных пар, фиксирующих положение нала редуктора 4 при различных углах об , можно выбирать оптимальную скорость процесса измерений при различной величине измеряемого угла.
а /refffrtpo VfTftjvec ffuu t/fj&Sef b
пл. sopc/sff ffCf
Ж
| название | год | авторы | номер документа |
|---|---|---|---|
| Квадрант | 1978 |
|
SU927023A1 |
| Устройство для контроля оптической передаточной функции оптических систем | 1988 |
|
SU1589099A1 |
| Массовый расходомер | 1975 |
|
SU559114A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ СЕЙСМОМЕТРА | 2002 |
|
RU2233459C2 |
| Устройство дистанционной передачиуглА пОВОРОТА ВАлА | 1979 |
|
SU801030A1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Способ ультразвукового измерения толщины движущейся ленточной заготовки и устройство для его осуществления | 1988 |
|
SU1520332A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ОБЪЕКТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078360C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО СКЛОНЕНИЯ НА МОРЕ | 1990 |
|
RU2069876C1 |
| Устройство для программного управления шаговым двигателем | 1988 |
|
SU1596308A1 |
КВАДРАНТ, содержащий основание, cBJTsaHHbie с ним корпус и горизонтирующий блок, выполненный в виде электролитического уровня, укрепленного на оси редуктора, связанного с валом реверсивного шагового двигателя, мостовой измерительной схемы, вход которой связан с выхо.дом электролитического уровня, генератора импульсов, реверсивного счет-И 7 ,::- ,. -л чика и цифрового индикатора, о тличающийся тем, что, с целью повьппения быстродействия устройства за счет исключения приведения электролитического уровня к плоскости горизонта перед началом измерения, в него введены датчик положения вала редуктора и электронньй делитель, причем выходы датчика положения вала редуктора связаны с первйм и вторым входами реверсивного счетчика и входами генератора импульсов, выход которого связан С входом шагового двигателя и через с электронный делитель с четвертым входом реверсивного счетчика, а (Л выход мостовой измерительной схемы с связан с третьим входом реверсивного счетчика, выход которого соединен с входом цифрового индикатора;
A fM/ryfjo t/frruf/ec Lfu урове г /7Л. горизонта
. 2 у f7J1. Sffpt/SOf rrrcf
Фс/е. 3 JлfнmpoJ7U/r7t/tfecf uU уровень 7 V
| Устройство для измерения угла наклона | 1981 |
|
SU972212A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Квадрант | 1978 |
|
SU927023A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
