Изобретение относится к измерительной технике, в частности к области гравиинерциальных измерений, а именно к сейсмометрии.
Известно устройство ориентации сейсмометра [1], содержащее магнитную стрелку, ориентирующуюся по магнитному полю Земли, и круговую шкалу с делениями от 0 до 360°. Это устройство не обеспечивает возможности азимутальной ориентации сейсмометров, помещенных в скважину.
Наиболее близким техническим решением к предлагаемому является устройство азимутальной ориентации [2], содержащее скважинный трехкомпонентный сейсмометр, выход горизонтальной компоненты которого соединен с первым входом аналого-цифрового преобразователя (АЦП), установленного в персональную электронно-вычислительную машину (ПЭВМ); поворотный стол с круговой отсчетной шкалой и редуктором; второй сейсмометр (горизонтальный), установленный на поворотном столе и измеряющий горизонтальные сейсмические волны, выход которого соединен со вторым входом АЦП. Устройство обеспечивает азимутальную ориентацию скважинного сейсмометра посредством взаимного корреляционного анализа выходных сигналов горизонтальной компоненты трехкомпонентного скважинного сейсмометра и горизонтального сейсмометра, установленного на поворотном столе и поворачивающегося в плоскости горизонта.
Недостатком прототипа является недостаточная точность азимутальной ориентации скважинного сейсмометра, обусловленная влиянием внешних факторов, в частности оператора, на горизонтальный сейсмометр.
Техническим результатом, обеспечиваемым заявляемым изобретением, является повышение точности азимутальной ориентации скважинного сейсмометра посредством реализации режима дистанционного управления поворотным столом.
Технический результат достигается тем, что устройство азимутальной ориентации сейсмометра, содержащее ПЭВМ с АЦП, первый вход которого соединен с выходом горизонтальной компоненты трехкомпонентного скважинного сейсмометра; поворотный стол с круговой отсчетной шкалой и редуктором; горизонтальный сейсмометр, установленный на поворотном столе, выход которого соединен со вторым входом АЦП, дополнительно содержит последовательно соединенные плату управления шаговым двигателем, установленную в ПЭВМ; коммутатор и шаговый двигатель, выходной вал которого соединен со входом редуктора, а также блок формирования импульсов, вход которого соединен с выходом горизонтального сейсмометра, и реверсивный счетчик шагов, вход которого соединен с выходом блока формирования импульсов.
Такое выполнение устройства азимутальной ориентации обеспечивает дистанционное управление поворотным столом, исключающее влияние оператора, и, как следствие, повышение точности азимутальной ориентации скважинного сейсмометра.
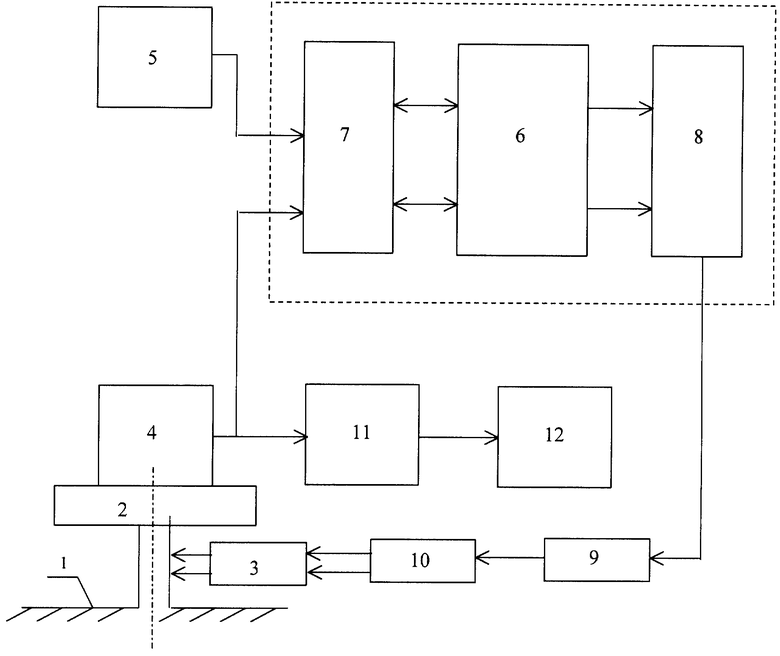
На чертеже представлена структурная схема предлагаемого устройства.
Устройство азимутальной ориентации сейсмометра содержит основание 1, на котором установлен поворотный стол 2 с круговой отсчетной шкалой, редуктором 3 на оси вращения и горизонтальным сейсмометром 4 на подвижной части; скважинный трехкомпонентный сейсмометр 5, ПЭВМ 6 с установленными в ней аналого-цифровым преобразователем (АЦП) 7 и платой управления шаговым двигателем 8; коммутатор 9; шаговый двигатель 10; блок формирования импульсов 11 и реверсивный счетчик шагов 12. Первый вход АЦП 7 соединен с выходом горизонтальной компоненты скважинного сейсмометра 5, второй вход - с выходом горизонтального сейсмометра 4, установленного на поворотном столе 2. Плата управления шаговым двигателем 8, коммутатор 9 и шаговый двигатель 10 соединены последовательно. Выходной вал шагового двигателя 10 соединен с входом редуктора 3. Вход блока формирования импульсов 11 соединен с выходом горизонтального сейсмометра 4, а вход реверсивного счетчика шагов 12 соединен с выходом блока формирования импульсов 11.
Устройство азимутальной ориентации скважинного сейсмометра работает следующим образом.
В начальном положении ось чувствительности горизонтальной компоненты трехкомпонентного скважинного сейсмометра 5 расположена в плоскости горизонта и направлена произвольно относительно географического меридиана. Ось чувствительности (измерения) горизонтального сейсмометра 4, установленного на поворотном столе 2, расположенном на основании 1, направлена по географическому меридиану и совпадает с нулем отсчетного устройства поворотного стола 2. В этом положении производится накопление посредством АЦП 7 в ПЭВМ 6 выходных данных обоих сейсмометров 4, 5, выделение сейсмических возмущений с периодом 6÷10 с и вычисление взаимной корреляционной функции. Затем от ПЭВМ 6 через плату управления 8 шаговым двигателем 10 и коммутатор 9, переключающий обмотки шагового двигателя, осуществляется разворот стола 2 (на N шагов) в плоскости горизонта на угол α1, равный, например, 10°. Каждый угловой шаг поворота стола 2 измеряется горизонтальным сейсмометром 4, установленным на нем, формируется в виде электрического импульса блоком 11 и запоминается в счетчике шагов 12. Таким образом осуществляются дистанционный разворот стола 2 и измерение угла поворота его. Это позволяет уменьшить уровень внешних возмущений на горизонтальный сейсмометр 4, установленный на поворотном столе 2, от действий оператора и повысить точность измерения сейсмических волн с периодом 6-10 с.
После разворота стола 2 вновь осуществляется накопление данных в ПЭВМ 6 и вычисление взаимной корреляционной функции. Путем многократного дистанционного разворота стола 2 в плоскости горизонта и соответствующих вычислений находится угол Ψ между начальным положением поворотного стола 2 и положением, в котором значение взаимной корреляционной функции сигналов сейсмометров 4, 5 максимально. Этот угол Ψ будет соответствовать углу азимутальной ориентации горизонтальной компоненты скважинного сейсмометра 5 относительно географического меридиана. При этом точность определения угла азимута Ψ во многом определяется точностью угла разворота поворотного стола 2. При шаге шагового двигателя αш=3° и передаточном отношении редуктора i=100 точность разворота поворотного стола 2 и измерения угла Ψ составляет

Число выполненных шагов измеряется реверсивным счетчиком шагов 12, обеспечивающим подсчет шагов поворота стола 2 по часовой и против часовой стрелки, а полный угол разворота стола 2

где Ni - число шагов, выполненных в процессе выполнения i разворота.
Блок формирования импульсов 11 осуществляет полосовую фильтрацию положительных или отрицательных импульсов, соответствующих повороту стола 2 в ту или иную сторону и подлежащих счету в реверсивном счетчике шагов 12.
Таким образом, предлагаемое устройство азимутальной ориентации сейсмометра в сравнении с прототипом обеспечивает дистанционное управление поворотным столом, за счет чего повышается точность азимутальной ориентации скважинного сейсмометра.
Источники информации
1. В.П. Селезнев. Навигационные системы. - М.: Машиностроение, 1972, с.50-70.
2. Техническое описание скважинного сейсмометра Guralp CMG-3T3 фирмы Guralp Sistems Limited, Англия, 2000 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИННЫЙ ТРЕХКОМПОНЕНТНЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2488849C1 |
| Трехкомпонентный скважинный сейсмометр | 2019 |
|
RU2717166C1 |
| Трехкомпонентный скважинный сейсмометр | 2019 |
|
RU2719625C1 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕЙ ДИФФЕРЕНЦИАЛЬНОЙ ВЕКТОРНОЙ ТРЕХМЕРНОЙ МАГНИТОСКОПИИ | 2013 |
|
RU2548405C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Устройство для регистрации графической информации | 1973 |
|
SU499571A1 |
Изобретение относится к измерительной технике, в частности к области гравиинерциальных измерений, а именно к сейсмометрам. Технический результат - повышение точности азимутальной ориентации скважинного сейсмометра посредством реализации режима дистанционного управления поворотным столом. Сущность: устройство содержит горизонтальный сейсмометр, установленный на поворотном столе с круговой отсчетной шкалой и редуктором на оси вращения, скважинный трехкомпонентный сейсмометр, ПЭВМ с установленными в ней аналого-цифровым преобразователем (АЦП) и платой управления шаговым двигателем, коммутатор, шаговый двигатель, блок формирования импульсов и реверсивный счетчик шагов. Первый выход АЦП соединен с выходом горизонтальной компоненты скважинного сейсмометра, второй вход - с выходом горизонтального сейсмометра, установленного на поворотном столе. Плата управления шаговым двигателем, коммутатор и шаговый двигатель соединены последовательно. Выходной вал шагового двигателя соединен с входом редуктора. Вход блока формирования импульсов соединен с выходом горизонтального сейсмометра. Вход реверсивного счетчика шагов соединен с выходом блока формирования импульсов. 1 ил.
Устройство для определения азимутальной ориентации сейсмометра, содержащее ПЭВМ, с установленным в ней АЦП, скважинный трехкомпонентный сейсмометр, выход горизонтальной компоненты которого соединен с первым входом АЦП, поворотный стол с круговой отсчетной шкалой и редуктором, горизонтальный сейсмометр, установленный на поворотном столе, выход которого соединен со вторым входом АЦП, отличающееся тем, что оно дополнительно содержит последовательно соединенные плату управления шаговым двигателем, установленную в ПЭВМ, коммутатор и шаговый двигатель, выходной вал которого соединен с входом редуктора, блок формирования импульсов, вход которого соединен с выходом горизонтального сейсмометра, и реверсивный счетчик шагов, вход которого соединен с выходом блока формирования импульсов.
| Устройство для ориентации сейсмоприемников в скважине | 1980 |
|
SU935851A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ТРЕХКОМПОНЕНТНОГО СЕЙСМОМЕТРА | 1990 |
|
RU2022302C1 |
| Устройство коррекции яркости осциллоскопа для гамма-камеры | 1977 |
|
SU623421A1 |
| GURALP SYSTEM LTD, specification borehole seismograph CMG-3TV, England, 25.10.2000. | |||

