/г
J s
в г
Изобретение относится к измерительной технике и может быть использовано для измерения линейных ускорений в системах инерциальной навигации. ..
Цель изобретения - новышени-е точности акселерометра за счет компенсации конечной жесткости упругого подвеса чувствительного элемента.
На фиг.1 представлена конструкция акселерометра с неэлектропроводным чувствительным элементом, например, кварцем на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг. Г; на фиг.4 - вариант конструкции с электропроводным чувствительным элементомJ на фиг.З - разрез В-В на фиг. 4 ; на фиг. 6 - разрез Г-Г на фиг. 4
Акселерометр содержит центральную пластину 1, чувствительный элемент 2, прикрепленный к центральной пластине через упругие балочки 3. На плоские поверхности неэлектроп.роводного чувствительного элемента напылены электропроводные слои 4. По обе стороны от чувствительного элемента расположены неподвижные пластины 5, в случае их изготовления из неэлектропроводного материала на них напьшяется электропроводный слой 6. Чувствительный элемент 2 и пластины 5 образуют элементы электростатического датчика угла, совмещенного с датчиком момента.
Центральная пластина, 1 фиксируется относительно неподвижных пластин 5 с помощью прокладок 7 и 8. С внешних сторон иеподвилсных пластин расположены элементы импульсного блока электроники 9, связанные электрически с; электродами неподвижных пласти и чувствительного элемента. Несущим элементом конструкции акселерометра является корпус 10. На чувствительно элементе выполнен выступ 11, по обе стороны от выступа на корпусе расположены два дополнительных электрода 12, связанные с источником напряжени электронного блока 9.
Устройство работает следующим образом.
При действии ускорения на чувствительный элемент 2 инерционная сила уравновешивается компенсирующей силой датчика момента через контур пенсации. В качестве датчика угла, совмещенного с датчиком момента емкостного типа, используются чувствительньй элемент 2 с напыленным на него электропроводным слоем 4 и неподвижные пластины 5 с электропроводными слоями 6. Работа этих элементов в качестве датчика угла и датчика момента разделена по времени и обеспечивается импульсным блоком электроники 9. В один из промежутков времени блоком электроники 9 осуществляется определение положения чувствительного элемента. В следующий промежуто импульсный блок 9 формирует на пластинах 2 и 5 напряжение, создающее компенсирующую силу, пропорциональну отклонению чувствительного элемента от положения равновесия. По величине этого напряжения судят о величине действующего на чувствительньш элемен ускорения.
Наличие статической ошибки по углу отклонения чувствительного элемента при действии на него ускорения, несовпадение положения равновесия чувствительного элемента с нулевым положением датчика угла, смещение и дрейф нуля усилителя постоянного тока, входящего в блок электроники 9 создают дополнительное усилие, определяемое жесткостью упругих балочек 3 и вносят погрешность в измерение ускорения. В устройстве;жесткость балочек 3 компенсируется с помощью выступа 11 на чувствительном элементе и двух соединенных между собою электродов 12, присоединенных к дополнительному источнику напряжения, входящему в блок электроники 9. Электроды 11 и 12 с дополнительным источником напряжения создают отрицательную жесткость. При определенном напряжении дополнительного источника и определенном взаимном расположении электродов 12 относительно электрода 11 с учетом перемещений последнего эта отрицательная жесткость практически линейна и может быть равной жесткости балочек 3.
Действительно, электростатическая сила притяжения подвижного электрода .11 к одному из неподвижных электродов 12 равна
,.5 S; (), а к другому
,,U2,/(e,)S
где Е - диэлектрическая постоянная среды между электродами акселерометра;3 Sj - площадь электрода 12; U - напряжение между электродами 1 1 и 1 2 v де, - смещение электрода 11 из нейтрального положения, в котором расстояние между электродами 11 и 12 равно е Результирующая сила, действующая на подвижный электрод 11, определяется выражением .,и,е,ле,/(е,+ле|) Поэтому, обеспечивая конструктивно, чтобыде не превышало нескольки микрон, а е составляло несколько десятых миллиметра, будем иметь F (,, т.е. электроды 11 и 12 с дополнитель ным источником напряжения создают
А -А
. 3
// 74 практически линейную отрицательную жесткость. При отклонении чувствительного элемента акселерометра на угол о момент, создаваемый результирующей силой F на плече f относительно оси подвеса чувствительного элемента, равен M, (,/e.. Исходя из условия компенсации жесткости С балочек 3 М,,С . Отсюда-.величина напряжения дополнительного источника питания должна быть равной и T|ee3 /( ). Таким образом, достигается полная компенсация жесткости балочек упру- гого подвеса чувствительного элемента акселерометра.
ti
9 S
в-в

| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2000 |
|
RU2162229C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| Электростатический акселерометр | 1983 |
|
SU1150549A1 |
| Емкостный акселерометр | 1987 |
|
SU1530999A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| Компенсационный маятниковый акселерометр | 1982 |
|
SU1027627A1 |
| ИМПУЛЬСНЫЙ МИКРОСИСТЕМНЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2432578C2 |
| МУЛЬТИСЕНСОР | 1996 |
|
RU2104559C1 |
| Емкостный акселерометр | 1987 |
|
SU1561047A1 |
| Емкостной акселерометр | 1984 |
|
SU1174861A1 |

КОЖЕНСАЦИОННЬШ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР, содержащий корпус, укрепленный в нем на упругом подвесе чувствительный элемент с электропроводными поверхностями, два укрепленных на корпусе по обе стороны чувствительного элемента неподвижных электрода, импульсный блок электроники, соединенный с чувствительным элементом и неподвижными электродами, отличающийся тем, что, с целью повышения точности, в него введены источник напряжения и два дополнительных электрода, укрепленных на корпусе пс обе стороны чувствительного элемента и смещенных относительно оси подвеса, причем источник напряжения подключен одним вьшо дом к чувствительному элементу, а другим - к двум дополнительным элек тродам. (Л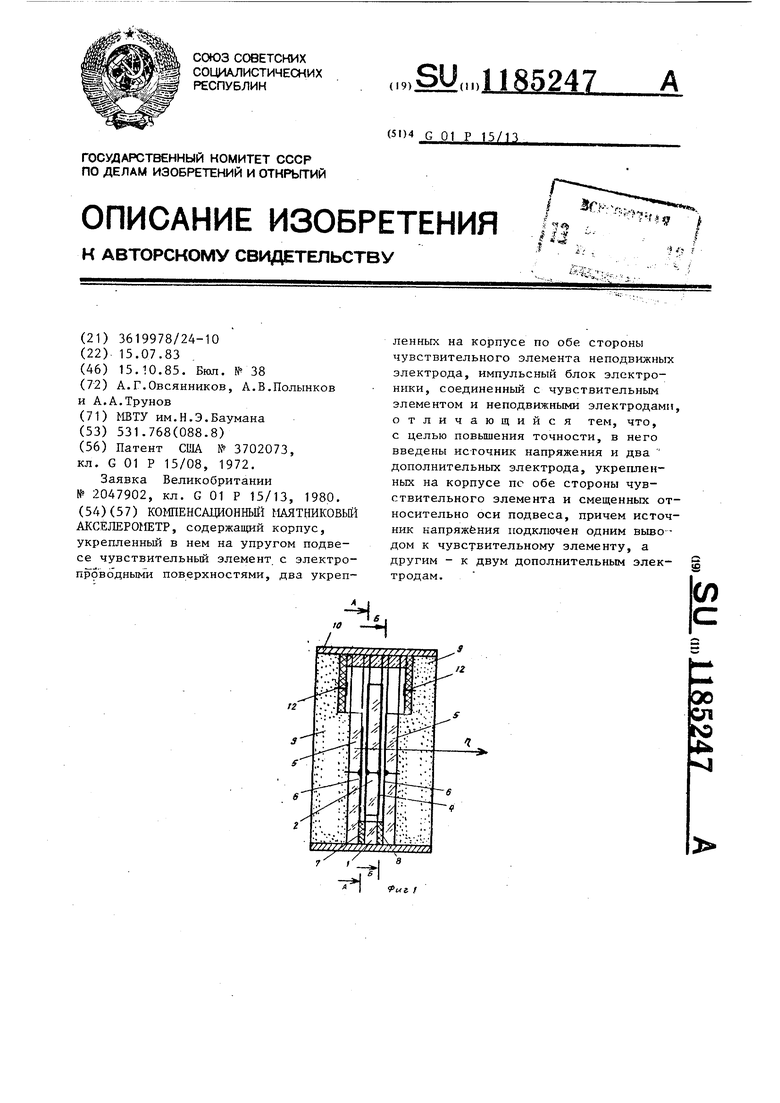
| Патент США № 3702073, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕДАЧИ ИНФОРМАЦИИ | 1991 |
|
RU2047902C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
