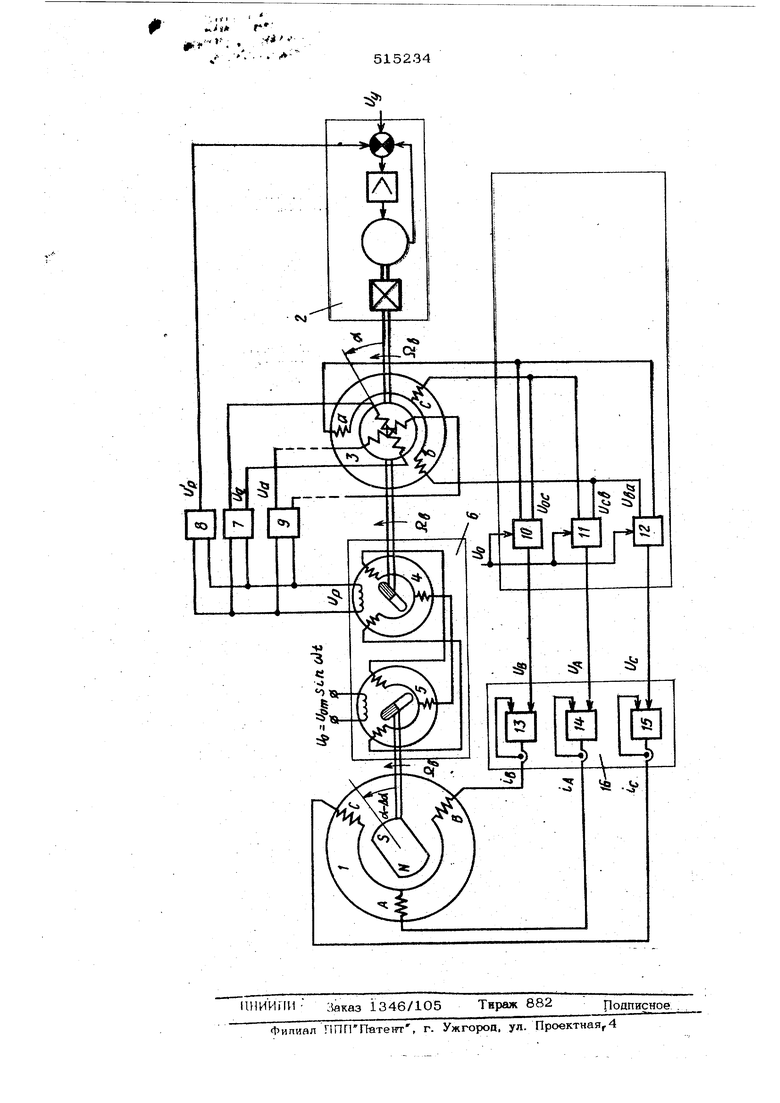
токов якоря могут задаваться пропорционально углу рассогласования меноду поперечной осью индуктора и задаваемой осью поля якоря, при этом в зависимости от скорости изменения этого угла должно корректироваться задаваемое положение оси поля якоря Для устранения качаний и оамораскачиваний машины б личина тока якоря может задаваться как корень квадратный из суммы квадратов двух величин, одна .из которых постоянна, а другая пропорциональна углу рассогласования между попе речной. осью индуктора и задаваемой осью поля якоря. На чертеже показана блок-схема синхрон ного привода, в которой реализован предлагаемый способ управления. 1 Упра:вляющее воздействие - сигнал Ц. определяющий требуемую скорость вращения jij синхронного двигателя 1, подается на электромеханический преобразователь 2, На выходном валу преобразователя 2 установлены два индукционных датчика 3 и 4 типа сельсинов. Датчик 4 вместе с датчиком 5, установленном на валу двигателя 1, образуют измерительное устройство 6.(сельсинная пара), которое вырабатывает напряжение рассогласования Up . . Напряжение У пропорционально углу рассогласования между Поперечной осью индук-тора (ротора) и осью поля якоря, задаваемой угловым положением датчика 3 Up К, 17л. 7 . где К. - коэффициент; Vg - напряжение питания сельсинной пары 6. Необходимое взаимное угловое положение датчиков 3, 4, 5 и ротора двигателя 1 обеспечивае-тся начальной установкой датчи. ков. Напряжений / в общем случае подается, на функциональные устройства 7, 8 и 9, с выходов которых поступают сигналы и Iffi . Сигналы Ua и t/cf питают квадратурные обмотки ротора датчика 3, а сигнал 17о (производная сигнала С используется в качестве сигнала обратной связи на входе преобразователя 2. Напряже ния % и If йрёдотавляюг собой переме ные напряжения некоторой несущей частоты Сс , амплитуды которых определяются сиг налом и в соответствий с характеристиками устройств 7 и 8. Со статорных обмоток датчика 3 трехфазная система напряжений поступает на фа . зочувствительные выпрямители 1О, 11 и 1 на выходе которых образуется трехфазная система напряжений Ц , Ci и 14 чаотаты J7, , .свободной; от несущей частоты Ш .Эта система напряжений поступает на усилители токов 13, 14 и 15 (усилитеЛи- напряжений с жесткой обратной связью по вьЕходным токам), которые образуют преобразователь энергии 16. Преобразователь 16 питает синхронный двигатель 1 токами, создающими поле якоря, направление оси которого задается угловым положением датчика 3, т.е. управляющим сигналом Ц, . Для упрощения пояснения работы привода будем считать, что устройства 8 и 9 отсутствуют. Для нормальной работы привода необходимо произвести начальную установку датчиков 3, 4, 5 относительно ротора двигателя 1. На чертеже принята такая начальная ус тановка, что при О сигнал w, создает в двигателе Х поле, ось которого. совпадает с поперечной осью поля индуктора (ротора). Датчики 4, 5 установлень при 0 так, Что сигнал рассогласования : Цэ 0. Будем считать, Что устройство 7 представляет собой обычный усилитель переменного -тока. Тогда при сХ. О Ub О, К О, следовательно, ток якоря также равен нулю.. При появлении рассогласования Л я между угловыми положениями ротора двигателя 1 и ротора датчика 3 появляется напряжение tfp на выходе устройства 6, которое усиливается устрюйством 7, в результанте чего по обмоткам двигателя 1 начинают протекать токи. Ось поля, созданного этими токами, оказывается развернутой относительно поперечной оси индук-тора на угол Ас Электромагнитный момент привода определя- еуся как, :М К ФГ:СозА, ., . где ф - поток, индуктора; 1 - ток якоря, равный К . (К,- коэффициент усиления); коэффициент пропорциональности. . ,. .- . I При соответствующем выборе коэффициента усиления К можно добиться ТОГО,.что. : требуемый максимал.ьщзгй момент привода I будет возникать эл.град., ; т.е. при СойлЛ i . Тогда можно считать, что элэктромагнитный момент-привода равен М KмФi - КдДЛ.у (где К,- коэф- . фициент пропорциональности К: Таким образом, в рассмотренном приводе ротор си№хроцного двигателя 1 будет занимать углрвое положение, отличающееся от углового положения вала преобразователя 2 на величину , необходимую для компенсации ; момента нагрузки. Скорость вращения вала двигателя 1 будет соответствовать скорооти вала преобразователя 2, задаваемой сигналом, .. Регулировочные характеристики рассмот ; резного привода лучше характеристик синхронного привода с известным часгогным уп равлением погому, что синхронная машина рабсхгает практически всегда с углом иагру ки близким к 90 эл.град., и регулирование момента происходит за счет величинь тока якоря. Это обстчэятельство позволяет работать двигателю с cos , близким к единице. С целью получения плавного перехода с одной скорости на другую без качаний ротора синхронной машины используют усгройство 8, которое вырабатывает производную . от сигнала i/Jt . Напряжение t4 используется в качестве сигнала обратной связи в контуре управления скоростью;,Jlj.npeo6pa3{ вателя 2. Согласно предлагаемому способу рабога синхронной машины без качаний может быть .юбеспечена также при применении сигнала ГПусть устройство 8 отсутствует, устрой-ство 7 - усилитель, а устройство 9 вырабатывает постоянный сигнал {7 , не зависящий от §/ « В этом случае намагничивающая сила якоря будет состоять из двух намагничивающих сил: намагничивающая сила, направленная по поперечной оси Индуктора и определяемая сигналом Ш , и намагни| чивающая сила| направленная по продольной оси индуктора и определяемая постоянным. С 11гналом. tf4 . В процессе работы привода намагничивающая сила, зависящая от LL , будет меняться. При ее изменении будут поводиться -токи в короткозамкнутых (ПУСКОВЫХ) обмотках индуктора. Зти токи, взаимо i дейсгвуя с намагничивающей силой от сигнала Ц/ , будут создавать асинхронный момент. : При соответствующем выборе величины к знака сигнала Ufj синхронная машина не будет качаться и самораскачиваться, так как асинхронный момент будет стабилизирующим. Формула и з о б р е т е и и я 1. Способ частотного управления скоростью синхронногх) двигателя путем измене ния частоты и с регулированием тока якоря, 10 тли ч а ю щ и и с я тем, что, с це-i лью получения жестких..характеристик, .ДепяютПоложение поперечной оси индукто|ра, сравнивают его с положением оси поля якоря, зависящим от сигнала задания часто1ты,и по результатам намерения регулируют величину, тока якоря. 2, Способ по п. 1, о т я и ч а ющ ийс я тем, что, с целью улучшения динаксн ческих свойств привода, измеряют скорость изменения положения оси индуктора относя- тельно оси-ПОЛЯ якоря и корректируют полем Женне оси поля 5исоря.
| название | год | авторы | номер документа |
|---|---|---|---|
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Двухканальная система регулирования скорости | 1980 |
|
SU900256A1 |
| Датчик для синхронного электродвигателя с частотно-токовым управлением | 1976 |
|
SU686124A1 |
| Способ пуска синхронного двигателя | 1981 |
|
SU1086534A1 |
| Электропривод | 1988 |
|
SU1529394A1 |
| Электропривод переменного тока | 1985 |
|
SU1272460A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Следящий электропривод | 1980 |
|
SU974333A1 |
| Устройство для синхронизации нажимных винтов клети прокатного стана | 1968 |
|
SU600679A1 |