1
Изобретение относится к области электротехники/ в частности к регулируемому электроприводу и может быть применено при регулировании скорости нагрузки.
Известен способ управления асинхронным двигателем, позволяющий регулировать скорость посредством изменения величины и частоты напряжения питания .Недостаток этого способа заключается в невозможности обеспечения жесткости механической характеристики больше, чем жесткость характеристики исполнительного асинхронного двигателя,
Известен способ управления короткозамкнутым асинхронным двигателем, предназначенный для приводов с регулированием скорости нагрузки 2.
Этот способ предусматривает изменение величины и частоты токов статора двигателя по результатам сравнения заданной и фактической частот вращения ротора и дает возможность получить жесткость механической характеристики привода больше, чем жесткость характеристики исполнительного двигателя.
Недостатком этого способа является то, что он не может обеспечить получение значительной жесткости механической характеристики привода из-за конечной величины коэффициента усиления в контуре формирования частоты токов статора.
По предлагаемому способу с целью повышения жесткрсти механических характеристик результат сравнения заданной и фактической частот вращения ротора двигателя преобразуют в частоту токов ротора, соответствующую величине тока статора, сулялируют полученную частоту с заданной частотой вращения и в соответствии с полученным результатом изменяют частоту тока статора.
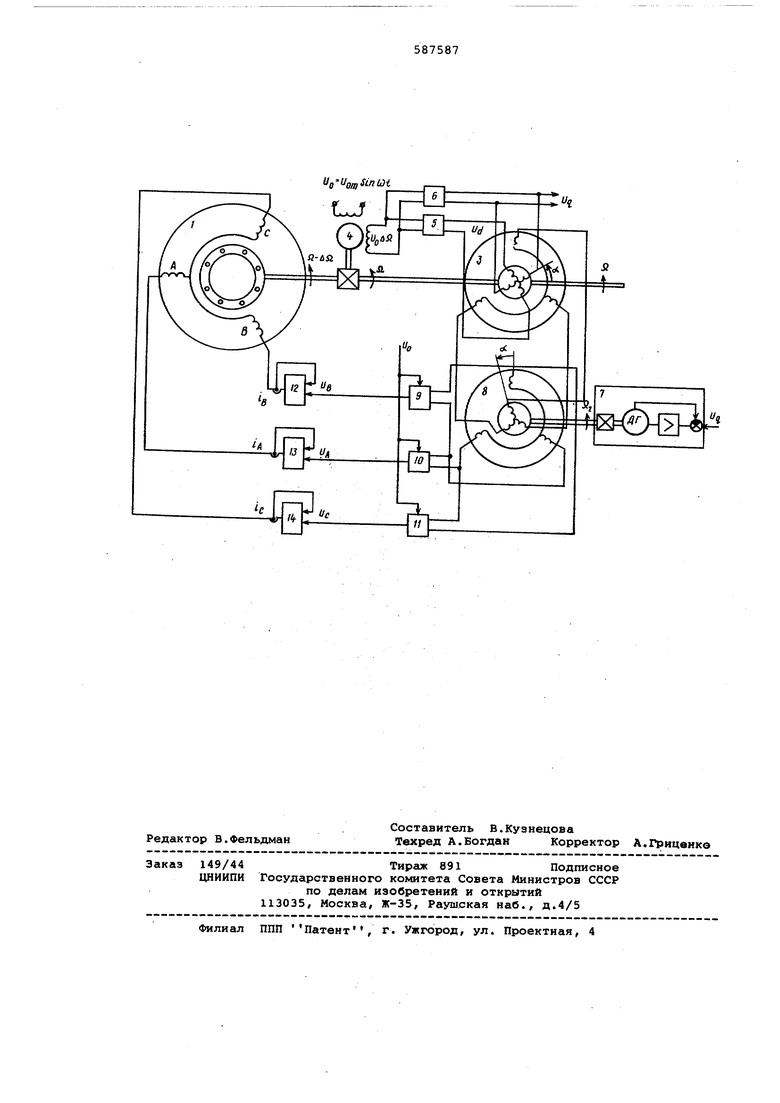
Изобретение поясняется чертежом, на котором приведена структурная схема привода с асинхронным двигателем, построенная в соответствии с предложенным способом.
Привод содержит короткозамкнутый асинхронный двигатель 1, дифференциал 2, сельсин 3, тахогенератор 4, функциональные элементы 5 и 6, преобразова.тель 7 напряжения в частоту, дифференциальный сельсин 8, фазочувствительные выпрямители 9,10 и 11, источники тока 12,13,14 для питания двигателя 1,
Заданная частота и вращения ротора двигателя является частотой вращения ротора сельсина 3 и сравнивается с .фактической частотой, вращения Si -Sl-Asi
ротора двигателя 1 с помощью дифференциала 2. Полученная в результате частота д 51 преобразуется с помощью тахогенратора 4, питаемого напряжением .,B напряженкеUoASlj которое поступает на входы элементов 5 и б. Выходные напряжения U . и Uq элементов 5 и б питают двухфазные роторные обмотки сельсина 3. Напряжение Но является также входным сигналом прербразователя 7, который приводит во вращение ротор сельсина 8 с частотой й.Сельсин 3 питает сельсин 8, который играет роль сумматора частот ft и Qg- Напряжения с выхода сельсина 8 с частотой и + И/ поступают на выпрямители 9-11, выходные напряжения которых являются сигналами задания-для источников тока 12-14. Опорным напряжением для выпрямителей 9-11 является напряжение и о .В приводе двигатель 1 питается токами, величина которых пропорциональна корню квадратному из суммы квадратов напряжений Uj и ИQ. Сигнал Uj определяет намагничивающий ток, а сигнал Uq - приведенный ток ротора двигателя. Частота токов статора формируется в виде суммы частот и и Qg. Элементы 5,6 и 7 формируют напряжения Uj и UiD и частоту sij в соответствии с требуемым режимом работы двигателя. Например, если требуется работа двигателя с постоянным потоком, то элемент 5 осуществляет нелинейное преобразование напряжения UgA Si в напряжение Uj ; при любом напряжении на входе элемента 5 М . Элемент б линейно преобразует напряжение UQASi в напряжение Ifq, которое линейно преобразуется в частоту и 2, элементом 7. Коэффициенты преобразования напряженияUq в ток статора и частоту Sij выбирают такими, при которых момент двигателя является линейнойфункцией напряженияUn и,следователйно, напряженияЦ да .Если требуется линейная зависимость момента и одновременно необходим минимум потерь в двигателе, то элемент 5 осуществляет линейное преобразование цапряженияВ да в напряжение Uj . При этом преобразователь 7 работает как нелинейный элемент, для которого справедливо у sigrtS2,5 slgKU .
Во всех случая коэффициенты прео разования элементов 5,6,7 выбираются достаточно большими и можно считать Я, и и является частотой токов ротора; частота токов статрра равна час(оте Л-t iZjjT а частота П,5г. Согласно предложенному способу с изменением частоты si изменяется частота токов статора. Фактическая частотаЛф вращения ротора двигателя изменяется строго в соответствии с заданной частотой что и говорит о высокой жесткости механических характеристик асинхронного двигателя.
Формула изобретения
Способ управления асинхронным короткозамкнутым двигателем, путем изменения частоты тока статора и с регулированием величины этого тока по результатам сравнения заданной и фактической частоты вращения ротора, отличающийся тем, что, с целью повышения жесткости механических характеристик, преобразуют указанный результат сравнения в частоту тока ротора, соответствующую величине тока статора, суммируют полученную частоту с заданной частотой вращения ротора и в соответствии с полученным результатом изменяют частоту тока статора .
Источники информации, принятые во внимание при экспертизе:
1.Булгаков А.А. Частотное управление асинхронными электродвигателями. Наука,1966. с.86-98.
2,Кривицкий С.О. и Энштейн И.И. Динамика частотно-регулируемых электроприводов с автономными инверторами, Энергия, 1970, с.100-103.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления моментом асинхронной машины | 1964 |
|
SU1185526A1 |
| Способ частотно-токового управления асинхронной машиной | 1973 |
|
SU680130A2 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Электропривод | 1979 |
|
SU942230A1 |
| Устройство формирования опорных сигналов системы управления приводом с асинхронной короткозамкнутой машиной | 1975 |
|
SU653709A1 |
| Электропривод переменного тока | 1982 |
|
SU1508337A1 |
| Способ частотного управления скоростью синхронного двигателя | 1972 |
|
SU515234A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Устройство для управления асинхронным электродвигателем | 1977 |
|
SU868960A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU991570A1 |