Целью изйбретения является упроще ние устройства и повышение точности получения оЯорных сигналов.
Указанная цель достигается тем, что в устройство формирования опорных сигналов системы управления приводом с асинхронной короткозамкнутой машиной, подключенной через блок дросселей к преобразователю частоты, содержащее векторный анализатор и блок апериодических звеньев, введены блок коррекции, блок модуляторов, блок фазированных выпрямителей. При этом блок дросселей содержит дополнительные обмотки, соединенные с одним из входов блока апериодических звеньев, другой вход которого подключен к блоку коррекции, а выход блока апериодическах звеньев через блок модуляторов и блок фазированных вьшрямителей подсоединен к векторному анализатору.
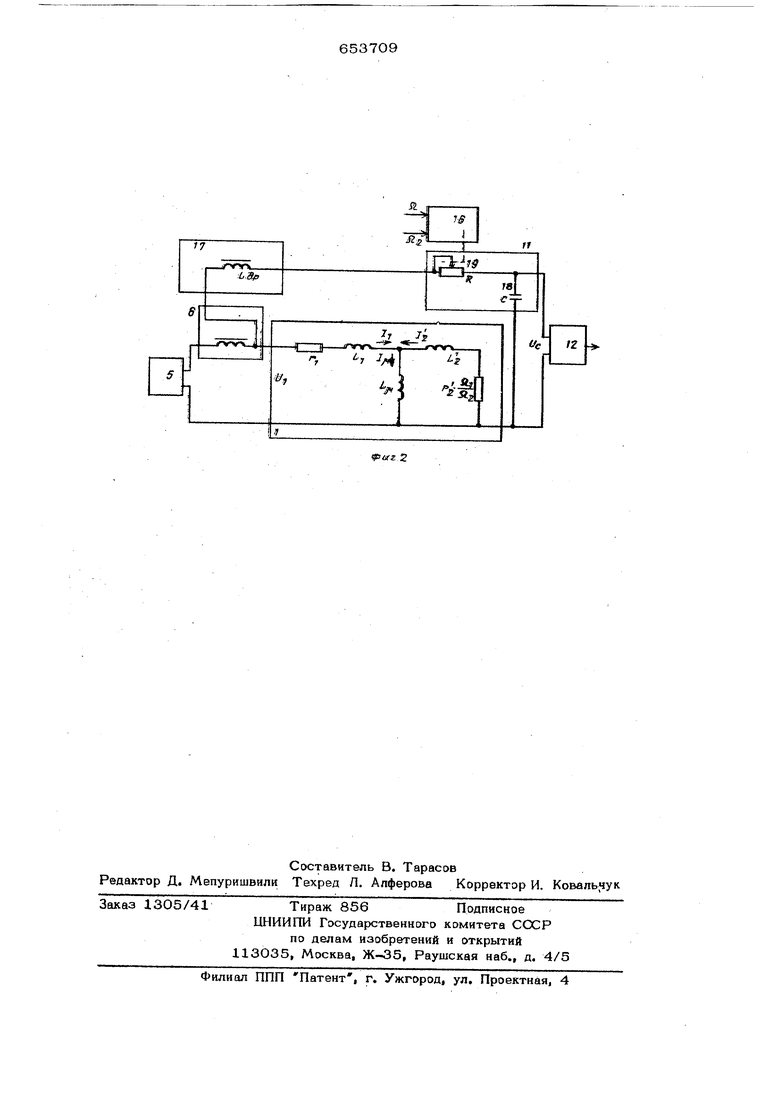
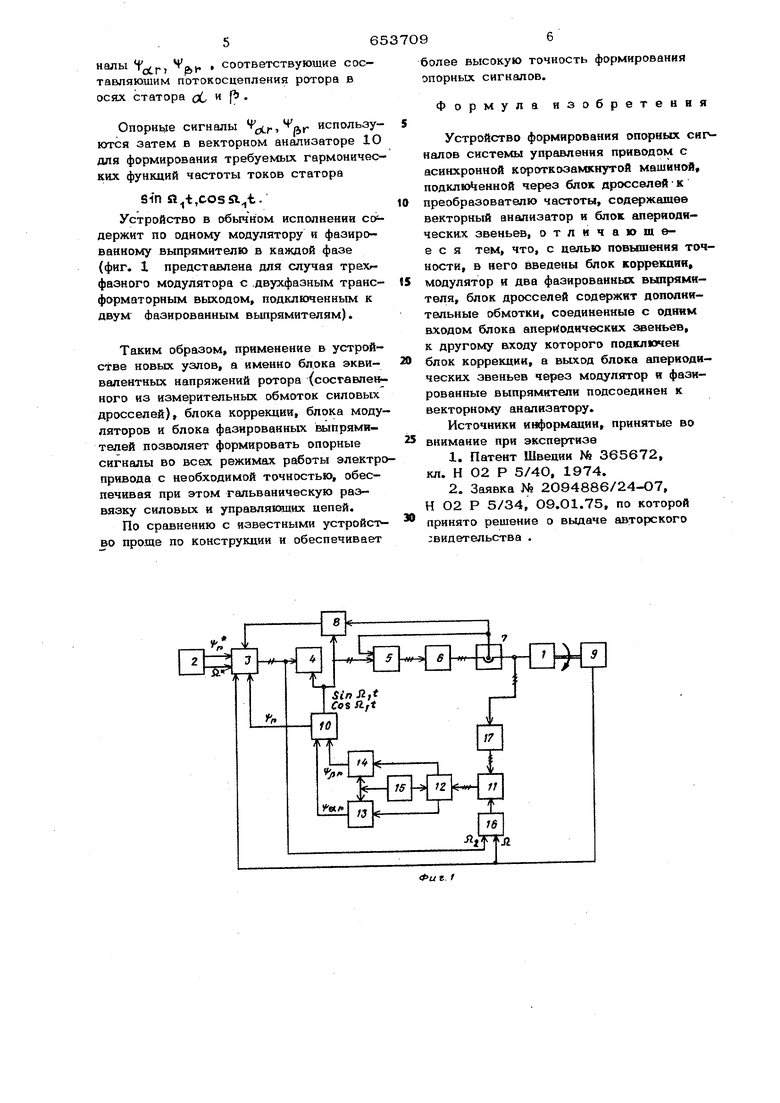
На фиг. 1 представлена функциональна схема устройства в составе электропривода с асинхронной короткозамкнутой машиной, на фиг. 2 - часть схемы устройства для одной фазы с раскрытой схемой замещения фазы асинхронной машины.
Асинхронная короткозамкнутая машина 1 управляется по двум независимым каналам: каналу яотокосцепления ротора и каналу активного тока ротора. С выхода блока задания 2 сигналы управлени f (задаюший потокосцепление ротора) и Л(задающий скорость вращения вала) поступают через блок регуляторов 3, блок прямого преобразования координат 4 на .преобразователь частоты 5, Фазйые цепи содержат блок дросселей 6 и блок датчиков тока статора 7. Блок обратного преобразования координат 8 подключен к блоку регуляторов 3. На валу машины установлен тахогенератор 9 Устройство формирования опорных сигналов содержит векторный анализатор 1О, блок апериодических звеньев И,. блок модуляторов 12, фазированные выпрямители 13, 14, выходы которых подключены к векторному анализатору 10. Источник опорного напря кения 15 подключен к блокам 12, 13, 14. Выходы тахогенератора 0 и блока регуляторов 3 подключены к блоку коррекции 16, связанному с блоком апериодических звеньев 11.
БЛОК, дросселей 6 содержит по одному дррссел1р в каждой фазе. Кроме оонрвной обмотки каждый из дросселей зодержит по дополнительной измерител,ной обмотке. На фиг. 1 указанные измерительные обмотки выделены в блок эквивалентных напряжений ротора 17.
Анализ схемы по фиг. 2 показывает, что сигналы на выходе блока апериоди ческих звеньев 11 (напряжение на конденсаторе 18 для представленной фазы) могут быть приняты в качестве опорных сигналов системы управления приводом как эквиваленты составляющих потокосцепления ротора.
При этом справедливо:
(О
H,
/ Sii
(j)
(+ р
при выполнении условий:
(2)
1ДР Ц2 L..L
. /т
в приведенных вьфажениях приняты следующие обозначения: t , t, Li , L, l - параметры схемы замещения; U , и о , -ij 1 о 1 / - напряжения и токи в
СЬе; Т фазе;
постоянная роторной
ги
цепи; - сигнал потокосцепления ротора; Ug - напряжение на конденсаторе 18 Ь р - индуктивность измерительной обмотки дросселя в блоке 17; Тд КСпостоянная времени апериодического звена в блоке 11; К f Kg - коэффициенты преобразований; 51 , Sij - круговые частоты токов статора и ротора соответствено; р- оператор.
Выполнение условия (2) по выбору измерительной обмотки не вызывает затруднений.
Выполнение условия (3) означает необходимость коррекции псх;тоянной Тд в функции отношения - . Такая коррекция, например за счет регулирования резистора 19 в блоке 11, производится с помощью блока 16, на вход которого поступает информация о частоте вращения вала Л и частоте токов ротора Л Устройство упрощается, если допустить ступенчатую коррекцию Тд. В этом случае число ступеней переключения резистора 19 зависит от той точности, которая необходима для определения в рриводе углового положения оси потокосцепления ротора в различньгх режимах работы.
Полученные на выходах блока апериодических звеньев 11 сигналы преобразуются с помощью блока модуляторов 12 и фазированных выпрямителей в сигналы , Нр , соответствующие составляющим потокосцепления ротора в осях статора оС ч р
Опорнуе сигналы используются затем в векторном анализаторе 10 для формирования требуемых гармонических функций частоты токов статора
Sln ,COSft t.
Устройство в обычном исполнении со держит по одному модулятору и фазированному выпрямителю в каждой фазе (фиг. 1 представлена для случая трахгфазного модулятора с .двухфазным трансформаторным выходом, подключенным к двум Фазированным вьшрямителям).
Таким образом, применение в устройстве новых узлов, а именно блока эквивалентных напряжений ротора (сосгавленного из измерительных обмоток силовых дросселей), блока коррекции, блока модуляторов и блока фазированных выпрямителей позволяет формировать опорные сигналы во всех режимах работы электропривода с необходимой точностью, обеспечивая при этом гальваническую развязку силовых и управлявших цепей.
По сравнению с известными устройст во проще по конструкции и обеспечивает
более высокую точность формирования опорных сигналов.
Фор м у ла изобретения
Устройство формирования опорных сигналов системы управления приводом с асинхронной короткозамкнутой машиной, подключенной через блок дросселей к преобразователю частоты, содержащее векторный анализатор и блок апериодических звеньев, отличающееся тем, что, с целью повышения точности, в иего введены блок коррекции, модулятор и два фазированных выпрямителя, блок дросселей содержит дополнительные обмотки, соединенные с одним аходом блока апериодических звеньев, к другому &ХОДУ которого подключен блок коррекции, а выход блока апериодических звеньев через модулятор и фазированные выпрямители подсоединен к векторному анализатору.
Источники информации, принятые во внимание при экспертизе
1.Патент Швеции № 365672, кл. Н О2 Р 5/40, 1974.
2.Заявка № 2094886/24-О7,
Н О2 Р 5/34, О9.О1.75, по которой принято решение о выдаче авторского свидетельства .
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310989A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Электропривод переменного тока с частотно-токовым управлением | 1985 |
|
SU1310990A1 |
| Асинхронный электропривод с частотно-токовым управлением | 1984 |
|
SU1239824A1 |
| Электропривод | 1988 |
|
SU1529394A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Устройство для управления асинхронной машиной с короткозамкнутым ротором | 1980 |
|
SU928580A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |