того и шестого элементов сравнения и первого элемента сравнения правого борта, выход задатчика поворота через четвертый и пятый элементы сравнения соединен с входом регулятора скорости левого борта, а через четвертый и шестой элементы сравнения - с входом регулятора скорости правого борта, управляющие входы регуляторов скорости соединены с выходом задатчика скорости, а выходы регуляторов скорости соединены с суммирующими входами третьих элементов сравнения левого и правого бортов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| Устройство для регулирования напряжения тягового генератора тепловоза | 1986 |
|
SU1390078A1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2588400C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2011 |
|
RU2454335C1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
ТЯГОВЬЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, содержащий электродвигатели для каладой полуоси правого и левого бортов, датчики частоты вращения электродвигателей, преобразователь напряжения, один управляющий вход которого подключен к регулятору частоты, первьй блок выделения минимальной частоты вращения электродвигателей, отличающийс я тем, что, с целью улучшения регулировочных характеристик, введе:НЫ преобразователи напряжения с регуляторами частоты, датчик тока, первый и второй узлы отсечки, первый, второй и третий элементы сравнения соответственно левого и правого бортов, р егулятор тягового-момента по числу полуосей, второй блок вьщеления минимальной частоты вращения электродвигателей, четвертый, пятый и шестой элементы сравнения, регуляторы скоростей электродвигателей полуосей левого и правого бортов, задатчик скорости и задатчик поворота, выход каждого преобразователя на1фяжения подключен к входу электродвигателя соответствующей полуоси, выход каждого датчика частоты. вращения электродвигателя соединен с входом регулятора частоты преобразователя напряжения и с суммирующим входом первого элемента сравнения, выход которого подключен к входу первого узла отсечки, выход преобразователя напряжения подключен к входу датчика тока, выход которого соединен с входом второго узла отсечки, выходы первого и второго узлов отсечки подключены к входам второго элемента сравнения,выход кото- , (Л рого подключен к вычитающему входу третьего элемента сравнения, выход которого через регулятор тягового момента подключен к второму управляющему входу преобразователя напряжения, выходы датчиков частоты вращения электродвигателей полуосей левого борта подключены к входам первого блока выделения минимальной частоты ЕХ вращения электродвигателей, выходы СП датчиков частоты вращения электроел двигателей полуосей правого борта 00 подключены к входам второго блока выделения минимальной частоты вращения электродвигателей,выход первого блока выделения минимальной частоты вращения электродвигателя подключен к суммирующему входу четвертого элемента сравнения и к вычитающим входам пятого и первого элементов сравнения левого борта, выход второго блока вьщеления минимальной частоты вращения электродвигателей подключен к вычитающим входам четвер
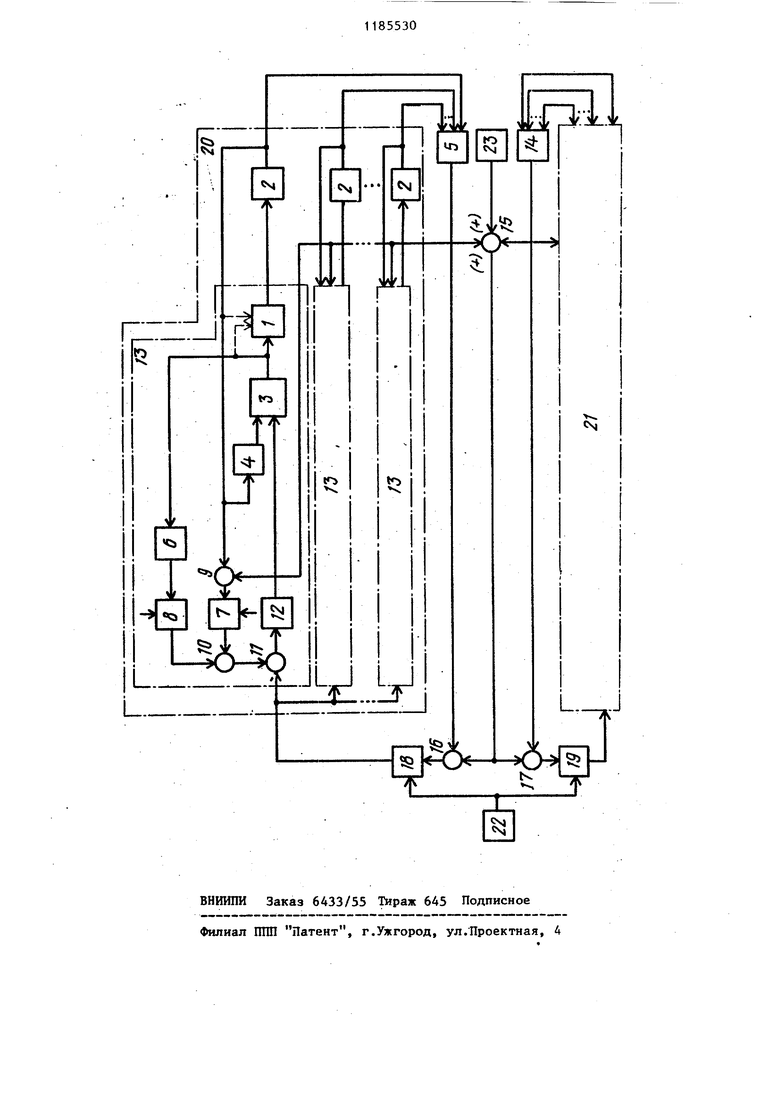
Изобретение относится к электротехнике, а именно к многоосным тяго вым электроприводам, и может быть использовано для пневмоколесных тра портных средств без поворотной плат формы. Цель изобретения - улучшение регулировочных характеристик. На чертеже представлена структур ная схема тягового электропривода. Тяговый электропривод переменного тока содержит электродвигатели 1 для каждой полуоси, датчики часто ты вращения 2 электродвигателей 1, преобразователь напряжения 3, один управляющий вход которого подключен к регулятору 4 частоты, первый блок 5 выделения минимальной частоты вра щения электродвигателей 1, датчик тока 6, первый и второй узлы отсечк 7 и 8, первый, второй и третий элементы сравнения 9, 10 и 11, регулятор 12 тягового момента в приводе 13 каждой полуоси, второй блок 14 выделения минимальной частоты ара щения электродвигателей 1, четверты пятый и шестой элементы сравнения 15, 16 и 17, регуляторы скорости 18 и 19 левого и правого бортов 20 и 21, задатчик 22 скорости и задатчик 23 поворота, выход каждого преобразователя 3 напряжения подключен к входу электродвигателя 1 соответствующей полуоси, выход каждого датчи ка 2 частоты вращения злектродвигателя 1 соединен с входом регулятора 4 частоты преобразователя 3 напряжения и с суммирующим входом первого элемента 9 сравнения, выход кото рого подключен к входу первого узла 7 отсечки, выход преобразователя напряжения подключен к входу датчика 6 тока, выход которого соединен с входом второго узла 8 отсечки, выходы первого и второго узлов 7 и 8 отсечки подключены к входам второго элемента 10 сравнения, выход которого подключен к вычитающему входу третьего элемента 11 сравнения, выход которого через регулятор 12 тягового элемента подключен к второму управляющему входу преобразователя 3 напряжения, выходы датчиков 2 частоты вращения электродвигателей 1 левого, борта 20 подключены к входам первого блока: 5 вьщеления минимальной частоты вращения электродвигателей 1, выходы датчиков 2 частоты вращения электродвигателей 1 правого борта 21 подключены к входам второго блока 14 вьщеления-минимальной частоты вращения электродвигателей 1, выход первого блока 5 вьщеления минимальной частоты вращения электродвигателей 4 подключен к суммирующему входу четвертого элемента 5 сравнения и к вычитающим входам пятого 16 элемента сравнения и первого элемента 9 сравнения приводов 13 левого борта 20, выход второго блока 14 вьщеления минимальной частоты вращения электродвигателей 1 подключен к вычитающим входам четвертого 15 и шестого 17 элементов сравнения и первого элемента 9 сравнения приводов 13 правого борта 21, выход задатчика 23 поворота через четвертый, элемент 15 и пятый 16 элементы сравнения соединен с входом регулятора 18 скорости левого борта 20, а через четвертый 15 и шестой 17 элементы сравнения - с входом регулятора 19 скорости правого борта 21, управляющие входы регуляторов 18 и 15 скорости соединены с выходом задатчика 22 скорости, а вы3
ходы регуляторов 18 и 19 скорости соединены с суммирующими входами третьих элементов 11 сравнения.
Устройство управления многодвигательным тяговым электроприводом работает следующим образом.
При движении транспортного средства группы приводов левого 20 и правого 21 бортов имеют средние частоты вращения, соответствующие заданному режиму движения. При этом приводы 13 каждой полуоси за счет различных дорожных условий имеют скорости, отличные от средней для соответствующего борта и меняющиеся по частичным тяговьм характеристикам. При этом сигналы датчиков 3 частоты вращения приводов 13 поступают на входы блоков 5 и 14 выделения минимальной частоты по каждому борту 20 и 21, управляющих частотой переключения вентилей (или групп вентилей) преобразователей 1 напряжения, обеспечивая формирование характеристик PJ const. Если в устройстве применены синхронные двигатели, то используются сигналы датчиков положения, частота следования которых пропорциональна частоте вращения двигателя. При этом формирование характеристик Р, const осуществляется регулированием возбуждения двигателей по скорости или току статора (показано пунктирными стрелками) . При боксовании одной из полуосей, например, левого борта 20 разность сигналов датчика 2 частоты и блока 5 выделения минимальной частоты 8, определяемая элементом 9 сравнения, превысит уставку первого узла 7 отсечки, а если нагрузка полуоси превысит допустимый уровень то сигнал с выхода датчика 6 тока превысит уставку второго узла 8 отсечки. В обоих случаях сигнал отрицательной обратной связи через второй элемент 10 сравнения и третий элемент 11 сравнения снижает сигнал на входе регулятора 12 тягового момента, что приводит к уменьшению момента двигателя 1 полуоси и ограничению контролируемой величины. Чтобы транспортное средство держало дорогу, результирующий сигнал
55304
управления скоростью каждого борта формируется в функции наименьшей из скорости этого борта, а также в функции разности скоростей бортов. 5 Для этого сигналы с выходов блоков 5 и 14 выделения минимальной частоты каждого борта 20 и 21 сравниваются на четвертом элементе 15 сравнения, и сигнал отклонения подается на пя0 тьм 16 и 17 элементы сравне- . ния. Если отклонения нет, то этот сигнал равен нулю. На эти же элементы 16 и 17 сравнения подаются сигна,лы отрицательной обратной связи по
5 скорости с блоков 6 и 7. При необходимости исключить Соксование на закруглениях или вообще управлять направлением в случае пневмоколесного транспортного средства без поворотной платформы (тележки) на четвертый элемент 15 сравнения подается сигнал от задатчика 23 поворота, что позволяет осуществить поворот с любым радиусом вплоть до разворота
5 на месте. Сформированные на элементах сравнения 16 и 17 сигналы подаются на входы обратных связей регуляторов 18 и 19 скорости левого 20 и правого 21 бортов, на задающие
0 входы которых подаются общий сигнал задания скорости. Регуляторы скорости 18 и 19 формируют общий сигнал управления скоростью для всех приводов 13 своего борта.
Таким образом, формирование характеристик Р| const для каждого привода 13 полуоси и работа на этих характеристиках обеспечивает экономичное использование первичного
теплового движения по неровной по. верхности.
Применение задержанной обратной связи по разности частот вращения
, каждой полуоси борта и максимально нагруженной полуоси этого борта ограничивает частоту вращения бокс;;ющего колеса на уровне, незначитель:- но превышающем частоту вращения
нагруженных колес, обеспе швая в то же время определенный допуск на расхождение частот вращения приводов одного борта, необходимый из-за различных условий качения.
i &
| Многодвигательный частотнорегулируемый электропривод | 1978 |
|
SU748767A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматическогоРЕгулиРОВАНия ТягОВОгО АСиНХРОННОгОэлЕКТРОпРиВОдА | 1978 |
|
SU799095A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
