Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для полигонных ресурсных испытаний тракторо Цель изобретения - повьпиение про изводительности устройства для авто матического вождения мобильных объе тов на полигоне, На фиг. 1 представлена испытывае мая машина на полигоне с системами автовождения, загрузки и внешнего электропитания, общий вид; на фиг. схема соединений секций токонесущего рельса с датчиками и переключателями. Устройство для автоматического вождения мобильных объектов на полигоне содержит датчик 1 положения машины 2 с устройствами креп Ленин, подпружиненную штангу с токо съемником 3, поджимаемым к токонесущему проводу 4, укрепленному на подвесах 5. С токосъемника 3 электроэнергия поступает на токонесущую колодку 6, от нее к энергопотребителям 7 испытываемой машины 2 и далее - на дополнительное колесо 8 и токонесущий рельс, который разделен на секции 9 - 13 и т.д. Дополнительное колесо 8 поджимается к токонесущему рельсу при помощи пружины 14. Между секциями токонесущего рельса установлены датчики 15 на штангах с упорами 16, пружина ми 17, опорными кронштейнами 18, контактами 19 и 20 и электромагнитн ми защелками, которые состоят из соленоида 21, якоря с упором 22 и пружины 23. Контакты 19 соединены с -токонесущим рельсом и линией элек тропитания, контакты 20 соединены с линией электропитания и обмотками соленоида соседнего датчика. Устройство работает следующим образом. На полигоне последовательно уста навливается несколько машин 2, про02ходящих испытания. При движении первой машины 2 дополнительное колесо 8 наезжает, например, на расположенный между секциями 9 и 11 рельса датчик 15, штанга с упором 16 перемещается вниз, сжимая пружину 17, при этом упор штанги 16 скользит по упору 22 якоря и сжимает пружину 23. Одновременно размыкаются контакты 19, и секции 11 токонесущего рельса обесточиваются. При полном перемещении штанги с упором 16 датчика 15 вниз упор 16 штанги заскакивает за упор 22 якоря, контакты 20 включаются, передавая напряжения на обмотки соленоида 21 датчика 15, расположенного между секциями 11 и 12 токонесущего рельса. При этом шток якорь с упором 22 втягивается, упор 22 освобождает упор 16 штанги, . датчик 15 под действием пружи 1Ы 17 перемещается вверх, размыкая контакты 20 и замыкая контакты 19, в результате секция 12 токонесущего рельса соединяется с линией электропитания . Следующая за первой машина 2 имеет возможность перемещения по всем секциям токонесущего рельса за исключением секции, следующей за секцией, на которой располагается или движется первая машина 2. Таким же образом могут двигаться и все последующие машины. Если машина 2 въехала на секцию токонесущего рельса, являющейся следующей за той, на которой располагается или Движется предыдущая машина, то вследствие отсутствия электропитания она остановится. При уходе впереди идущей машины с предшествующего участка токонесущего рельса на участок, где остановилась машина, подается электропитание, автомат включает машину в работу и она продолжает движение по полигону. 12 20 19/ / I 22 2/ Фиг.2 10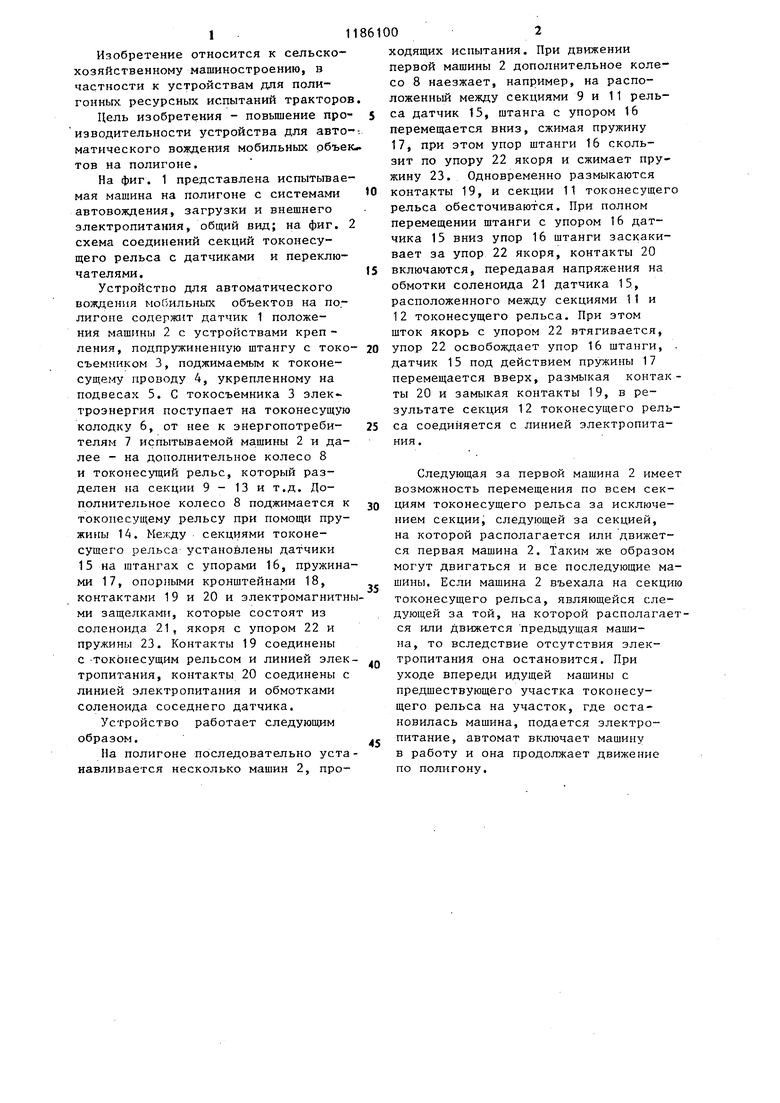
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| Бесконтактная система автовождения мобильного объекта на полигоне по узконаправленному лучу | 1988 |
|
SU1625361A1 |
| Устройство для автоматического переключения передач при испытаниях транспортных машин | 1984 |
|
SU1219949A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| Способ заполнения кассеты для выращивания растений и устройство для его осуществления | 1989 |
|
SU1701143A1 |
| Прибор для автоматического определения процента вытяжки, например, основы на шлихтовальной машине | 1961 |
|
SU145211A1 |
| Устройство для автоматического вождения транспортного средства при испытании на треке | 1986 |
|
SU1371546A1 |
| ИНВАЛИДНАЯ КОЛЯСКА | 2007 |
|
RU2373912C2 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2010 |
|
RU2459916C1 |
| Тележка для перевозки штучных грузов | 1985 |
|
SU1348253A1 |
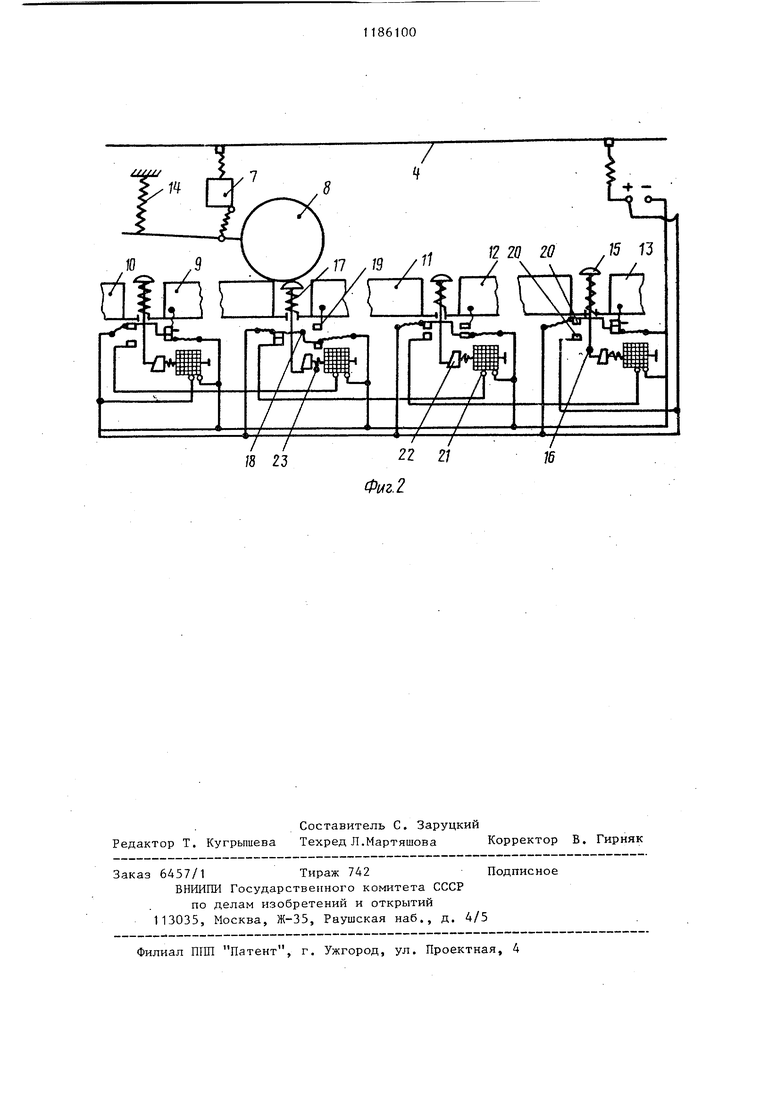
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ НА ПОЛИГОНЕ ,: по авт.св. № 1014491, отличающееся тем, что, с целью повышения производительности, оно снабжено датчиками, каждый из которых имеет два неподвижных контакта и закрепленные на подпружиненной штанге упор и два подвижных контакта и электромагнитными защелками, каждая из которых содержит соленоид и подпружиненный якорь с упором, а токонесущий рельс вьшольен в виде изолированных секций, при этом датчики установлены в промежутках между секциями токонесущего рельса с возможностью взаимодействия с дополнительным колесом, а их штанги при помощи упоров связаны с соответствующими электромагнитными защелками, причем первый неподвижный контакт каждого датчика соединен с предыдущей по ходу машины секцией токонесущего рельса, первый подвижный контакт каждого датчика соединен с первым выводом соленоида электромагнитной защел € ки и отрицательной клеммой источни(Л ка электропитания, второй неподвижный контакт каждого последующего датчика соединен с вторым выводом каждого предьщущего по ходу машины соленоида электромагнитной защелки, а второй подвижный контакт каждого датчика соединен с плюсовой 00 клеммой источника электропитания. а /f I Фиг / , Г5 П
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
