него движения с поворотами на транспортных режимах.
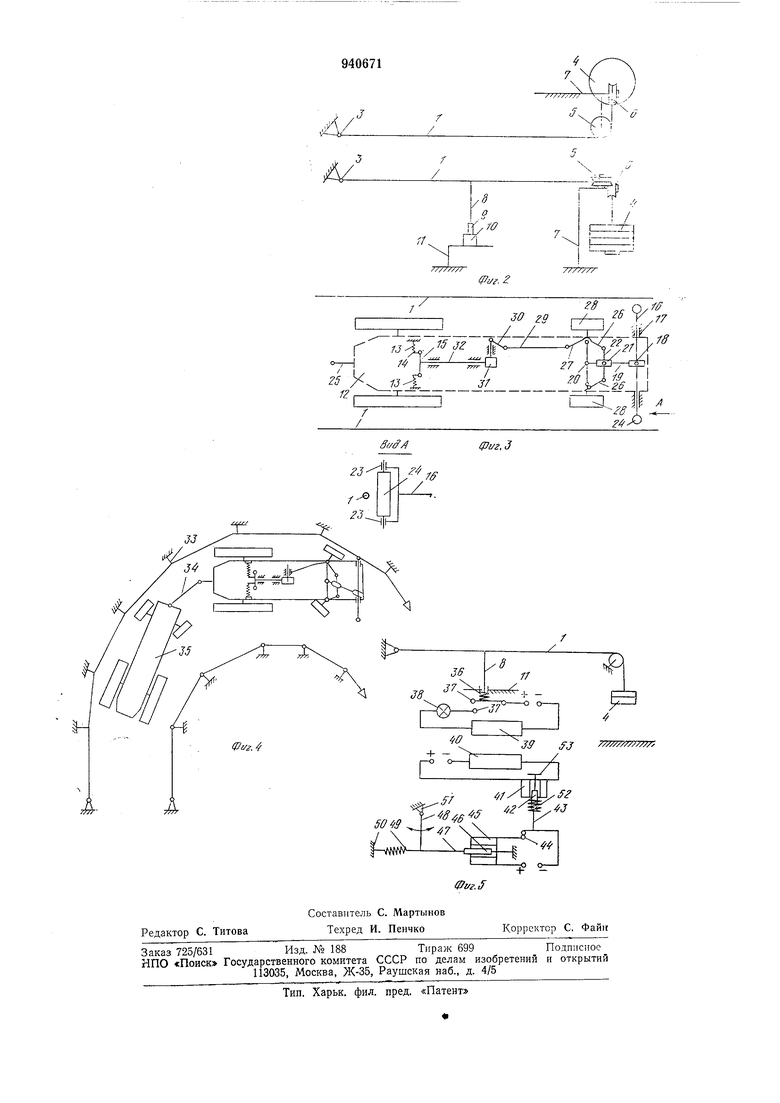
Трос 1 закрепляется на опоре 3 и имеет механизм натил ения в виде груза 4 и шкивов 5 и 6, укрепленных на опоре 7. В средней части трос 1 через поводок 8 соединен со стержнем клапана 9 механизма 10, фиксирующего исправное натяжение тросов 1 и расположенного на опоре 11. Механизм автовождеиия мобильного атрегата трактора 12 включает две противоположно направленные пружины 13, соединенные одними концами хомутами 14 с рулевым колесом 15, а другими концами- с остовом трактора; штангу 16, расположениую в передней части трактора и перемеш,аюш,уюся в поперечном направлении в направляюших 17, соединенных с остовом трактора. Штанга 16 имеет палец 18. Рычаг 19, содиненный шарниром 20 с остовом трактора, имеет прорезь, в которой располагается палец 21, соединенный Q поперечной тягой 22 трактора, и вилку на конце, иаз которой охватывает лалец 18 тетанги 16. На концах штанги 16 располагаются в опорах 23 вертикально расположенные контактные ролики 24. Штанга 16 зафиксирована от враш,ения. Трактор 12 оборудован прицепным навесным устройством 25.
Трактор 12 имеет поворотные рычаги 26 и 27 управляемых колес 28, продольную тягу 29, сошку 30, рулевой механизм 31, рулевой вал 32.
По полигону трактор 12 внутри ограждающих тросов 1, закрепленных в промежуточных опорах 33 с возможностью проскальзывания, € помощью сцепного устройства 34 к трактору 12 присоединено загрузочное устройство 35.
Механизм 10, фиксирующий исправное натяж;ение тросов 1, содержит пружину 36, контакты 37, световой сигнал 38 аварийного состояния. Механизм 10 связан посредством радиоканала, включающего передатчик 39, приемник 40 и реле 41 и соленоида, контур которого включает шток 42 с поводком 43, размыкающие контакты 44, реле 45, щток 46 с поводком тяги 47 с тягой 48 подачи топлива, подпружиненных пружиной 49 с опорой 50. Тяга 48 соединена с опорой 51. Реле 41 имеет пружину 52 с ограничителем 53.
Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность работает следующим образом.
При уходе трактора 12 с траектории прямолинейного движения или при движении на повороте контактный ролик 24 касается направляющего троса 1. Под действием боковой силы прогибается трос 1, чем смягчается удар контактного ролика 24 в трос 1, и приподнимается груз 4. Груз 4 стремится воздействовать на трос 1 и вернуть его в исходное положение. Под действием боковой силы штанга 16 перемещается в направляющих 17 в сторону центра поворота и через палец 18 воздействует на рычаг 19, который, в свою очередь, перемещает через палец 21 поперечную тягу 22. Вместе с перемещением поперечной тяги 22 перемещаются поворотные рычаги 26 и 27 и поворачиваются управляемые колеса 28 в иаиравление поворота трека. При этом продольная тяга 29 поворачивает Сошку 30 и через рулевой механизм 31 вращает рулевой вал 32 и рулевое колесо 15, преодолевая растяжение пружин 13.
При выходе трактора из поворота на прямолинейный участок либо при отходе трактора от направляющего троса на прямолинейном участке давление троса на ролики 24 ослабевает и под действием пружин 13 управляемые колеса и поперечная штанга 16 возвращаются в первоначальное положение прямолинейного движения.
Опоры 3, 5, 6, 33 обеспечивают возможность проскальзывания троса при воздействии на него боковой силы, поддерживают трос на заданном уровне и воспринимают силу натяжения троса иод действием, груза 4.
Сцепное устройство 34 обеспечивает следование загрузочного устройства 35 по траектории троса 1.
При обрыве троса 1, при обрыве груза 4 либо при соскальзывании троса 1 с роликов поводок 8 перестает удерживать в сжатом состоянии пружину 36. Разжимаясь, пружина 36 перемещает клапан 9, который замыкает контакты 37 системы автоматического останова испытываемого трактора.
При замыкании контактов 37 загорается -световой сигнал 38 аварийного состояния и передатчик 39 вырабатывает радиосигнал аварийной остановки испытываемого трактора. Па испытываемом тракторе радиосигнал от передатчика 39 принимается приемником 40, под действием которого срабатывает реле 41, втягивающее шток 42 с поводком 43 и размыкающее контакты 44. При этом обесточивается цепь реле 45, шток 46 с поводком тяги 47 перемещается влево под действием пружины 49 до упора в ограничитель щтока. При этом положении тяга 48, управляющая перемещением рейки топливного насоса трактора, поворачивается вокруг опоры 51 до положения выключения подачи топлива в систему топливоподачи двигателя, и трактор 12 останавливается.
После устранения неисправности на тросе 1 фиксируется поводок 8, для чего клапан 9, сжимая пружину 36, поднимается вверх, размыкая контакты 37 и прекращая работу передатчика 39 и прием сигналов приемником 40. При этом пружина 52 реле 41 воздействует на щток 42 с поводком 43 до момента замыкания контактов 44. Усилие воздействия пружины 52 на контактную пластину 44 ограничено ограничителем 53.
При замкнутых контактах 44 тяга 47 вместе со штоком 46 перемеид,ает тягу 48 с рейкой топливного насоса в положение полной подачи топлива, и двигатель трактора готов к запуску.
Преимуществом предлагаемого устройства автовождения является отсутствие постоянного контакта системы автовождения с ограничивающими трек тросами. При этом боковые силы, возбуждаемые при рысканьи трактора даже при значицельных скоростях движения, передаются на тросы 1 кратковременно и не способствуют их раскачиванию. Предлагаемая конструкция системы автовождения проста в исполнении и исключает возможность заклинивания при контакте с ограждением на любых скоростях движения. Износ предлагаемой системы автовождения из-за ее периодичности работы значительно меньше, чем для систем -с постоянным контактом с ограждением. Для уменьшения боковых усилий при повороте, возникающих в месте контакта ролика системы автовождения и ограничивающего троса, предусматривается виражный уклон трека на повороте.
Для лучшей вписываемости поезда из испытываемого трактора и загрузочного устройства ширина трека при повороте увеличена.
Ввод трактора и загрузочного устройства на трек осушествляется либо при опускании тросов, либо через систему открывающихся заграждений, обвод которых
6
продолжает конфигурацию ограждающих тросов трека.
Формула изобретения 5
1. Устройство для автоматического вол :дения мобильных агрегатов при ускоренных испытаниях на надежность, включающее ограждение и механизм автовол дения,
10 выполненный в виде контактных роликов,, соединенных кинематически с рулевым колесом, отличающееся тем, что, с целью обеспечения автоматизации вождения мобильных агрегатов с загрузочными
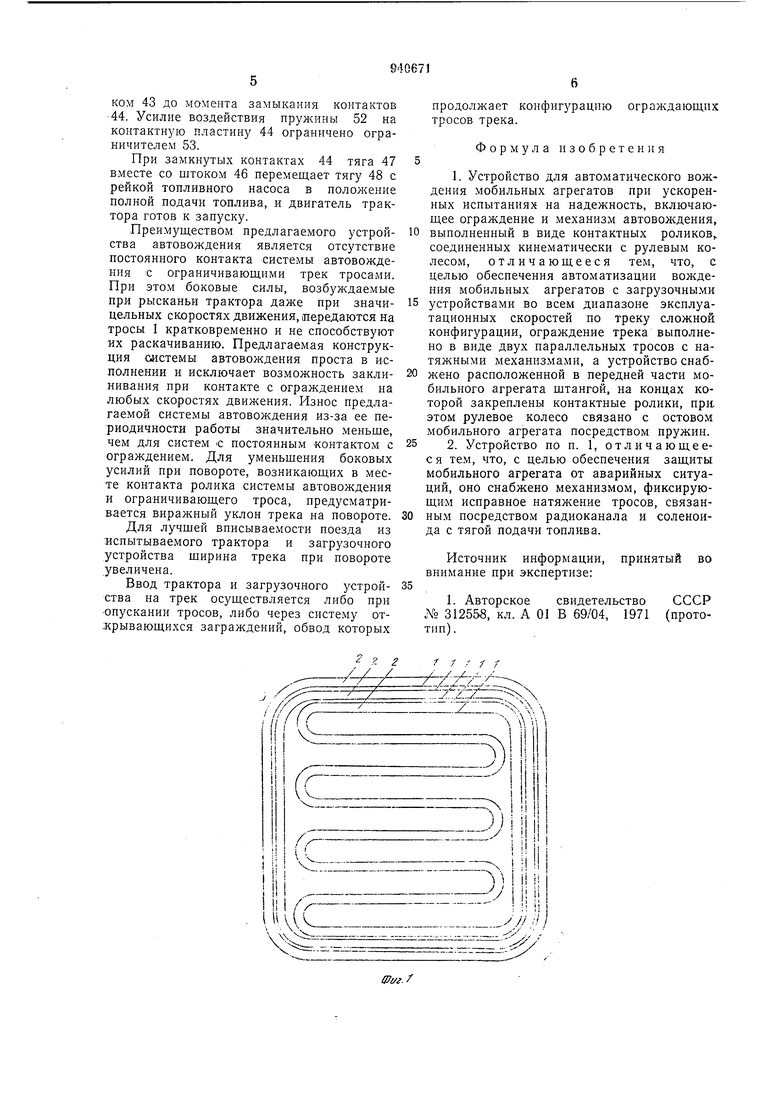
5 устройствами во всем диапазоне эксплуатационных скоростей по треку сложной конфигурации, ограждение трека выполнено в виде двух параллельных тросов с натяжными механизмами, а устройство снабжено расположенной в передней части мобильного агрегата штангой, на концах которой закреплены контактные ролики, при. этом рулевое колесо связано с остовом мобильного агрегата посредством пружин.
5 2. Устройство по п. 1, отличающеес я тем, что, с целью обеспечения защиты мобильного агрегата от аварийных ситуаций, оно снабжено механизмом, фиксирующим исправное натяжение тросов, связанным посредством радиоканала и соленоида с тягой подачи топлива.
Источник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР № 312558, кл. А 01 В 69/04, 1971 (прототип) .
940671
д/
д/
:: с:
:
о .
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения мобильных объектов на полигоне | 1981 |
|
SU1014491A1 |
| Устройство программного управления,например, полигонными испытаниями машин | 1982 |
|
SU1108424A1 |
| Устройство для автоматического вождения трактора при испытаниях на полигоне | 1980 |
|
SU934294A1 |
| Устройство для автоматического вождения транспортного средства при испытании на треке | 1986 |
|
SU1371546A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ БЫСТРОМОНТИРУЕМЫЙ | 2005 |
|
RU2295850C1 |
| Бесконтактная система автовождения мобильного объекта на полигоне по узконаправленному лучу | 1988 |
|
SU1625361A1 |
| РОЛЛЕР | 1991 |
|
RU2016807C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ЛЮФТА В РУЛЕВОМ УПРАВЛЕНИИ ТРАНСПОРТНОГО СРЕДСТВА ПРЕИМУЩЕСТВЕННО ДЛЯ ПРОЦЕССА АВТОВОЖДЕНИЯ | 1999 |
|
RU2183014C2 |
| Способ управления движением колесных тракторов и устройство для его осуществления | 1978 |
|
SU782730A1 |