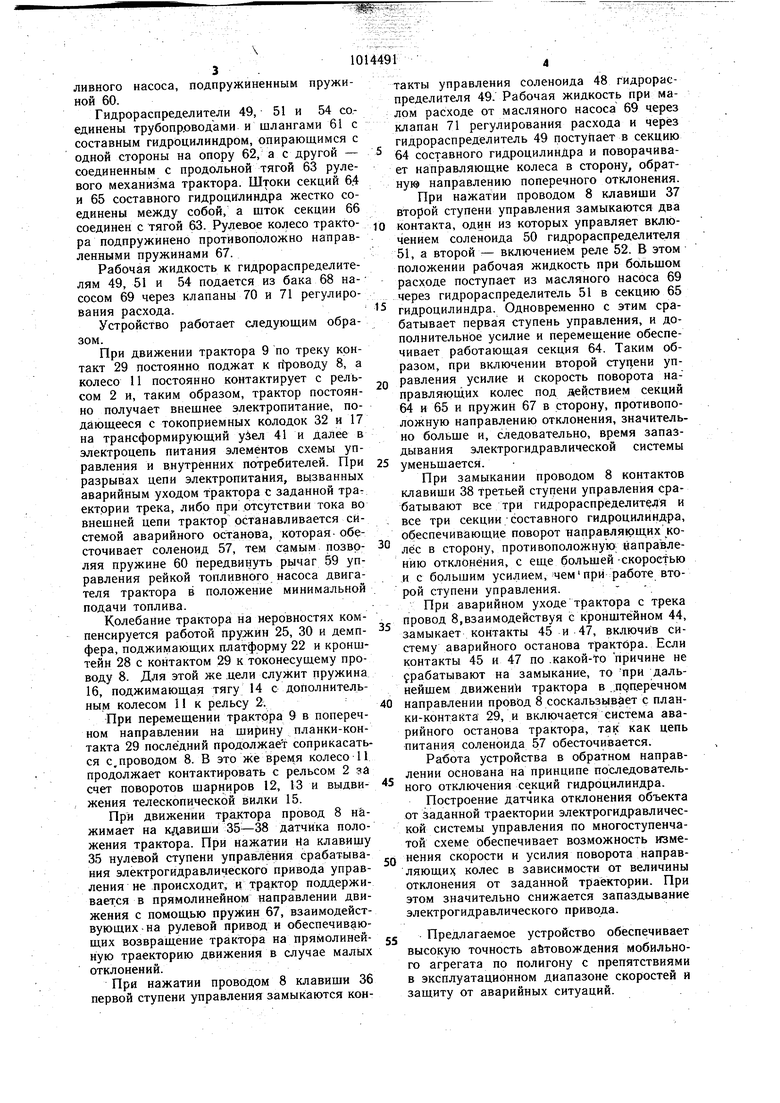
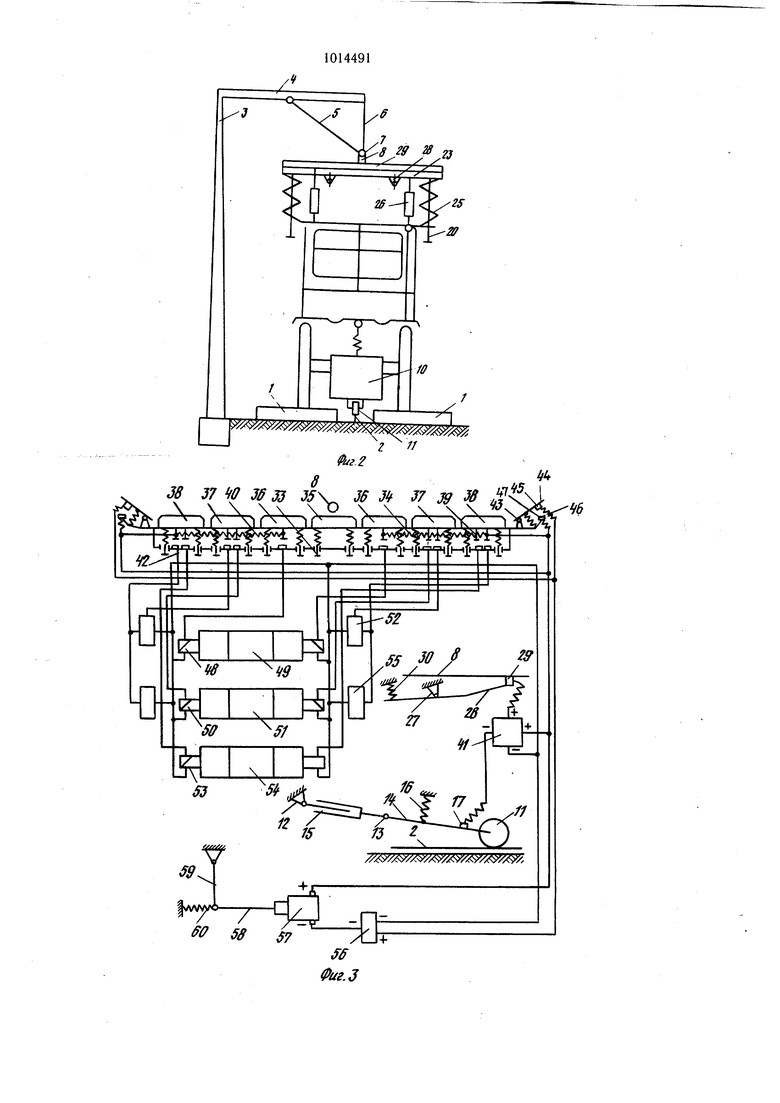
Изобретение относится к испытательной технике и предназначено для автоматического вождения мобильных объектов при ускоренных испытаниях на полигоне с препятствиями, оборудованном токонесущим проводом и токонесущим рельсом. Известны устройства для автоматического вождения мобильных объектов в эксплуатации и на полигоне по токонесущему проводу, например индукционного типа 1. Наиболее близким по технической сущности к предлагаемому является устройст-. во для автоматического вождения мобильных объектов на полигоне, включающее гидропривод с гидроцилиндром поворота колес, электронную схему управления гидрораспределителем, содержащую датчик положения объекта относительно заданной траектории 2. Однако в известном устройстве недостаточная точность копирования трассы из-за запаздывания электрогидравлического привода рулевого механизма, кроме того, использование его при движении по неровностям невозможно. Цель изобретения - повышение точности автовождения по полигону с препятстПоставленная цель достигается тем, что устройство снабжено дополнительными гидрораспределителями, а гидроцилиндр выполнен многоступенчатым, причем ступени гидроцилиндра соединены с соответствующими гидрораспределителями, которые соединены с гидронасосом через клапаны регулирования расхода. При этом датчик положения объекта .выполнен многоступенчатым в виде колодки с подпружиненными клавищами, контакты которых соединены с соленоидами управления гидрораспределителей непосредственно и через реле, управляющие клапанами регулирования расхода. На фиг. 1 представлен мобильный объект на полигоне, токонесущие и токоприемное устройства и контактный датчик положения объекта относительно токонесущего провода, вид сбоку; на фиг. 2 - то же, вид сзади; на фиг. 3 - электросхема системы автоматического вождения и аварийного останова;- на фиг. 4 - механико-гидравличес кая схема управления мобильным объектом. Устройство для автоматического вождения мобильного объекта на полигоне содержит трек с установленными на нем препятствиями 1 и токонесущим рельсом 2. Над токонесущим рельсом на опорах 3, кронщтейнах 4 с помощью растяжек 5, 6 и захватов 7 подвешен токонесущий провод 8. . На трек помещается мобильный объект, например, колесный трактор 9 с имитатором 10 нагружения так, что токонесущий рельс 2 располагается между колесами. На токонесущий рельс 2 устанавливается дополнительное колесо 11, которое с помощью шарниров 12 и 13 (фиг. 3), тяги 14 и телескопической вилки 15 соединено через изоляторы с остовом трактора. Шарнир 13 обеспечивает перемещен ие только в горизонтальной плоскости. Тяга 14 вместе с колесом 11 поджимается к рельсу 2 с помощью пружины 16. На тяге 14 установлена токоприемная колодка 17. На кабине трактора на кронштейнах 18 и 19 на штоке 20 с ограничителем 21 установлена платформа 22 датчика положения мобильного объекта относительно токонесущего провода. Датчик выполнен в виде контактного устройства 23 Склавищной колодкой 24. Платформа 22 с помощью пружин 25 поджимается к контактному проводу 8, перемещению платформы 22 препятствует демпфер 26. На платформе 22 установлена опора 27 токоприемного кронштейна 28 с планкой-контактом 29, кронштейн 28 поджимается к токонесущему проводу 8 с помощью пружины 30. От контакта 29, установленного на изоляторе, ток по проводу 31 поступает на токоприемную колодку 32, на клавишной колодке 24 с помощью штоков с ограничителями 33 и пружины 34 устанавливаются клавиши 35- 38 разных ступеней управления системы автоматического вождения трактора 9. С клавишами 35-38 контактирует токонесущий провод 8. Клавиши выполнены из диэлектрика, под ними располагаются верхние контакты 39, к которым подведены провода 40 от полюсового контакта источника тока через трансформирующий узел 41 и нижние контакты 42, соединенные с элементами схемы управления. По краям клавишной колодки 24 на опррах 43 установлены поворотные кронштейны 44 с контактами 45, подпружиненные пружинами 46. На выступе клавишной колодки установлены контакты 47, на которые замыкаются контакты 45 в случае ухода трактора с трека при повороте проводом 8 кронштейна 44. Клавиши 35 нулевой ступени управления контактов управления не имеют. Клавиши 36 первой ступени управления имеют по одному контакту, соединенному с соленоидами 48 гидрораспределителя 49. Клавиши 37 второй Ступени управления имеют по два контакта, одни из которых соединены с соленоидами 50 гидрораспределителя 51, а вторые - с управляющими реле 52. Клавиши 38 третьей ступени управления имеют по два контакта, одни из которых соединены с соленоидами 53 гидрораспределителя 54, а вторые - с управляющими реле 55. Количество ступеней управления выбирают лю.бым. Контакты 45 и 47 через реле 56 соединены с соленоидом 57 системы аварийного останова трактора. Шток соленоида 57 соединен тягой 58 с рычагом 59 рейки топливного насоса, подпружиненным пружиной 60. Гидрораспределители 49, 51 и 54 со,единены трубопроводами и шлангами 61 с составным гидроцилиндром, опирающимся с одной стороны на опору 62, а с другой - соединенным с продольной тягой 63 рулевого механизма трактора. Штоки секций 64 и 65 составного гидрощглиндра жестко соединены между собой, а шток секции 66 соединен с тягой 63. Рулевое колесо трактора подпружинено противоположно направленными пружинами 67. Рабочая жидкость к гидрораспределителям 49, 51 и 54 подается из бака 68 насосом 69 через клапаны 70 и 71 регулирования расхода. Устройство работает следуюш.им образом. При движении трактора 9 по треку контакт 29 постоянно поджат к переводу 8, а колесо 11 постоянно контактирует с рельсом 2 и, таким образом, трактор постоянно получает внешнее электропитание, подающееся с токоприемных колодок 32 и 17 на трансформирующий уЗел 41 и далее в электроцепь питания элементов схемы управления и внутренних потребителей. При разрывах цепи электропитания, вызванных аварийным уходом трактора с заданной трат ектррии трека, либо при отсутствии тока во внешней цепи трактор останавливается системой аварийного останова, которая-обесточивает соленоид 57, тем самым позволяя пружине 60 передвинуть рычаг 59 управления рейкой топливного насоса двигателя трактора в положение минимальной подачи топлива. Колебание трактора на неровностях компенсируется работой пружин 25, 30 и демпфера, поджимающих платформу 22 и кронштеин 28 с контактом 29 к токонесущему проводу 8. Для этой же дели служит пружина 16, поджимающая тягу 14 с дополнительным колесом 1 к рельсу 2. При перемещении трактора 9 в поперечном направлении на ширину планки-контакта 29 последний продолжает соприкасаться с.проводом 8. В это же время колесо 11 продолжает контактировать с рельсом 2 за счет поворотов шарниров 12, 13 и выдвижения телескопической вилки 15. При движении трактора провод 8 нажимает на кдавиши датчика положения трактора. При нажатии На клавишу 35 нулевой ступени управления срабатывания электрогидравлического привода управления не происходит, и трактор поддерживается в прямолинейном направлении движения с помощью пружин 67, взаимодействующих - на рулевой привод и обеспечивающих возвращение трактора на прямолинейную траекторию движения в случае малых отклонений. При нажатии проводом 8 клавиши 36 первой ступени управления замыкаются контакты управления соленоида 48 гидрораспределителя 49. Рабочая жидкость при малом расходе от масляного насоса 69 через клапан 71 регулирования расхода и через гидрораспределитель 49 поступает в секцию 64 составного гидроцилинДра и поворачивает направляющие колеса в сторону, обратную направлению поперечного отклонения. При нажатии проводом 8 клавиши 37 второй ступени управления замыкаются два контакта, один из которых управляет включением соленоида 50 гидрораспределителя 51, а второй - включением реле 52. В этом положении рабочая жидкость при большом расходе поступает из масляного насоса 69 через гидрораспределитель 51 в секцию 65 гидроцилиндра. Одновременно с этим срабатывает первая ступень управления, и дополнительное усилие и перемещение обеспечивает работающая секция 64. Таким образом, при включении второй ступени управления усилие и скорость поворота направляюц их колес под действием секций 64 и 65 и пружин 67 в сторону, противоположную направлению отклонения, значительно больше и, следовательно, время запаздывания электрогидравлической системы уменьшается. При замыкании проводом 8 контактов клавиши 38 третьей ступени управления срабатывают все три гидрораспределителя и все три секции-составного гидроцилиндра, обеспечивающие поворот направляющих колёс в сторону, противоположную напратвлению отклонения, с еще большей-скоростью н с большим усилием, чемпри работе второй ступени управления.При аварийном уходе трактора с трека провод 8,взаимодействуя с кронштейном 44, замыкает контакты 45 и .47, включив систему аварийного останова трактора. Если контакты 45 и 47 по .какой-то причине не 9Рзбатывают на замыкание, то при дальнейшем движений трактора в „поперечном направлении провод 8 соскальзывает с планки-контакта 29, и включается система аварийного останова трактора, так как цепь питания соленоида 57 обесточивается. Работа устройства в обратном направлении основана на принципе последовательного отключения гидроцилиндра. Построение датчика отклонения объекта от Заданной траектории электрогидравлической системы управления по многоступенчатой схеме обеспечивает возможность изменения скорости и усилия поворота направляющих колес в зависимости от величины отклонения от заданной траектории. При этом значительно снижается запаздывание электрогидравлического привода. Предлагаемое устройство обеспечивает высокую точность айтовожденкя мобильного агрегата по полигону с препятствиями в эксплуатационном диапазоне скоростей и защиту от аварийных ситуаций. 38 37 W 363d JJ 36 J« 37 jg 38 . , ,ХУ. ffG 58 /7 7. //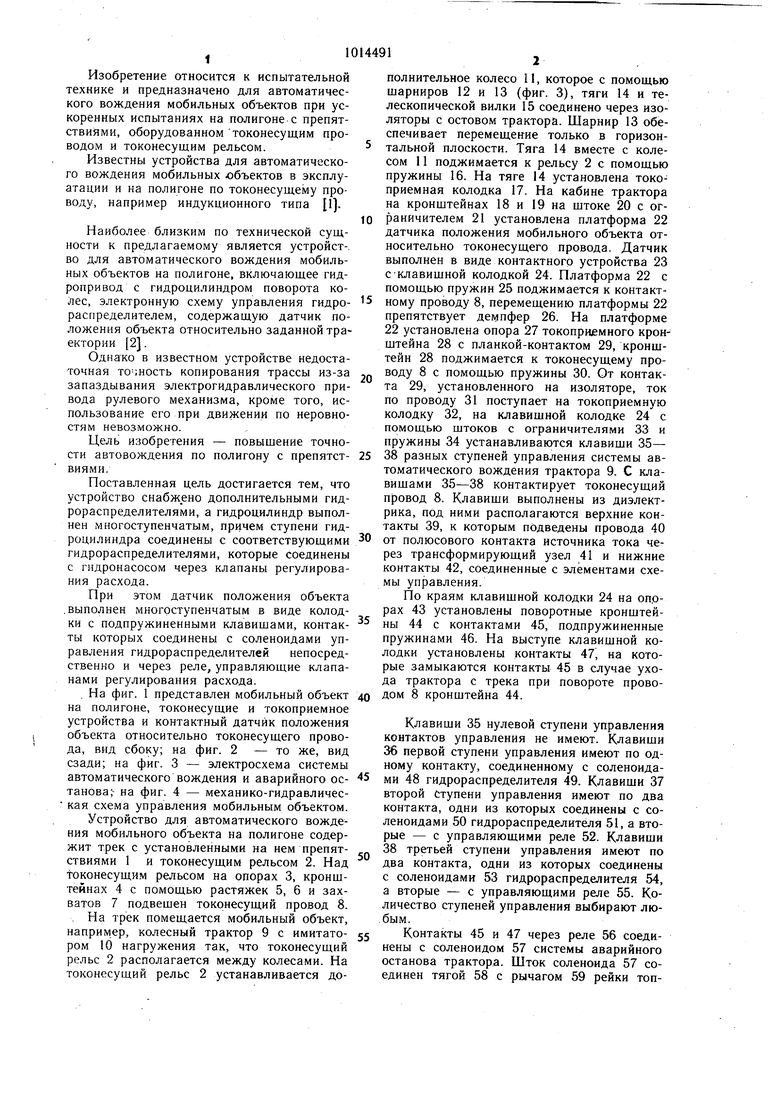
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения мобильных объектов на полигоне | 1984 |
|
SU1186100A2 |
| Бесконтактная система автовождения мобильного объекта на полигоне по узконаправленному лучу | 1988 |
|
SU1625361A1 |
| Устройство для автоматического вождения мобильных агрегатов при ускоренных испытаниях на надежность | 1980 |
|
SU940671A1 |
| Устройство программного управления,например, полигонными испытаниями машин | 1982 |
|
SU1108424A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА ПРИ ПОЛИГОННЫХ ИСПЫТАНИЯХ | 1971 |
|
SU312558A1 |
| Устройство для автоматического направления движения тракторного агрегата | 1978 |
|
SU710538A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1586548A1 |
| Электрогидравлическая система автоматического вождения сельскохозяйственной машины | 1987 |
|
SU1505454A1 |
| Устройство для удержания трактора на беговой дорожке трека при испытаниях | 1986 |
|
SU1317303A1 |
1. УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ НА ПОЛИГОНЕ, включающее гидропривод с гидроцилиндром поворота колес, электронную схему управле т 1 Ш т: §ткт ния гидрораспределителем, содержащую датчик положения объекта относительно заданной траектории, отличающееся тем, что, с целью повышения точности автовождения по полигону с препятствиями, устройство снабжено дополнительными гидрораспределителями, а гидроцилиндр выполнен ivworoступенчатым, при этом ступени гидроцилиндра соединены с соответствующими гидрораспределителями, которые соединены с гидронасосом через клапаны регулирования расхода. 2. Устройство по п. 1, отличающееся тем, что датчик выполнен многоступенчатым в виде колодки с подпружиненными клавишами, контакты которых соединены с соленоидами управления гидрораспределителей непосредственно и через реле, управляющие клапанами регулирования расхода. .tffff
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ САМОХОДНЫХ МАШИН ПО ТОКОНЕСУЩЕМУПРОВОДУ | 0 |
|
SU345890A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1976 |
|
SU548223A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
