2.Установка по п, 1, о т л и ч а ю щ а я с я тем, что механизм подачи блоков выполнен в виде двух лотков с подпружиненными упорами и установленные один в другой с возмож ностью перемещения относительно один другого при помощи сблокированш1 х между собой гидроцилиндров. 3.Установка по пп, 1 и 2, о тли чающаяся тем, что механизм укладки блоков выполнен в виде рычага, установленного на поворотной раме с возможностью возвратно-поворотного перемещения при помощи гидроцилиндра, сблокированного с гидроцилиндрами механизма подачи блоков, причб ось поворота рычага совпадает с геометрической осью внутреннего кожуха.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для возведения тюбинговой крепи | 1981 |
|
SU964162A1 |
| Устройство для бурения восстающих выработок | 1984 |
|
SU1262043A1 |
| Установка для бурения восстающих выработок | 1982 |
|
SU1129364A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ДЛИННОМЕРНЫХ КОНСТРУКЦИЙ | 1995 |
|
RU2076840C1 |
| Проходческий комбайн | 1985 |
|
SU1399473A1 |
| Автомат для резки труб | 1980 |
|
SU927418A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Грузозахватное устройство | 1978 |
|
SU753773A1 |
| Шаговый конвейер | 1985 |
|
SU1305084A1 |
| Проходческий комплекс | 1990 |
|
SU1781433A1 |
1. УСТАНОВКА ДЛЯ КРЕПЛЕНИЯ ВОССТАЮЩИХ ВЫРАБОТОК, содержащая поворотную раму на опорных лыжах, подвижную траверсу с нажимным венцом, внутренний и внешний кожухи, гидродомкраты предварительного сжатия блоков и опускания крепи, цепь с подхватом и передовым венцом, отличающаяся тем, что, с целью повышения производительности и безопасности обслуживания установки, она снабжена механизмом подачи и укладки блоков с гидроцилиндрами и механизмом перехвата цепи, вьтолненным в виде спрофилированных по форме звеньев цепи захватов, один из которых шарнирно закреплен на поворотной а S раме, а другой - на подвижной траверсе с возможностью взаимодействия меж(Л ду собой и цепью при помощи подпрус жиненного упора и тпги.
Изобретение относится к горному делу,, а именно к горнопроходческой технике, при механизации крепления опускными крепями восстающих вьфаботок,
Цель изобретения - повьпление производителг ности и безопасности обслуживания установки.
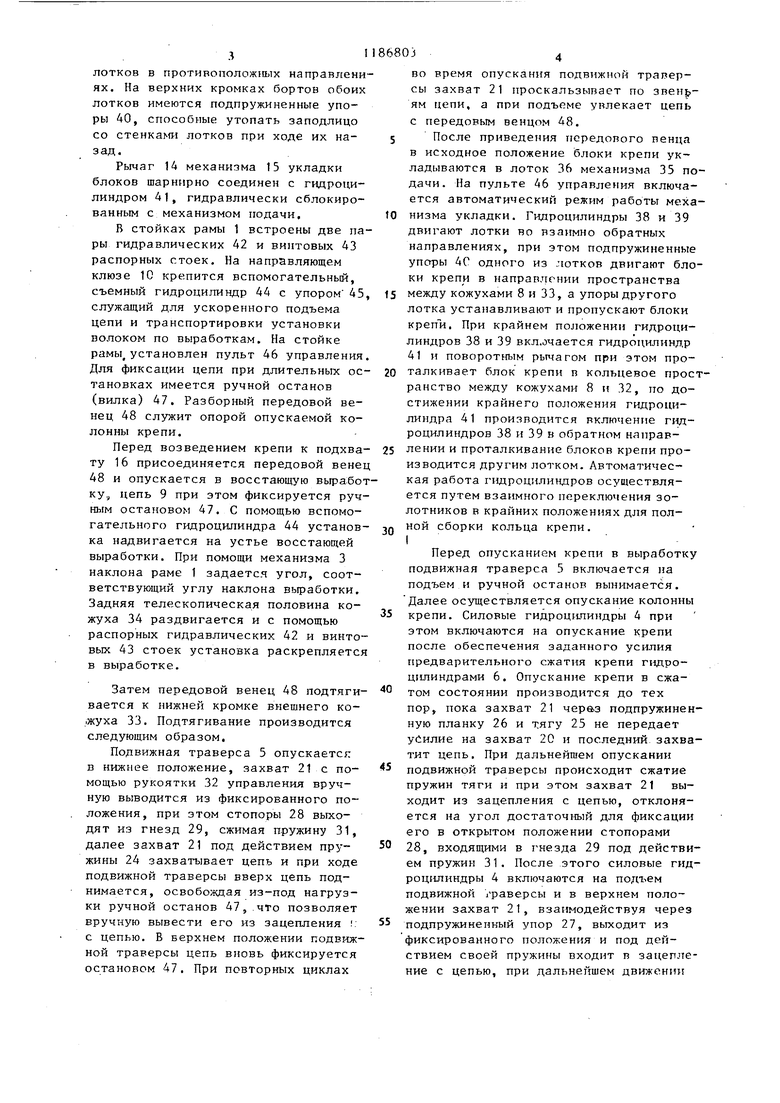
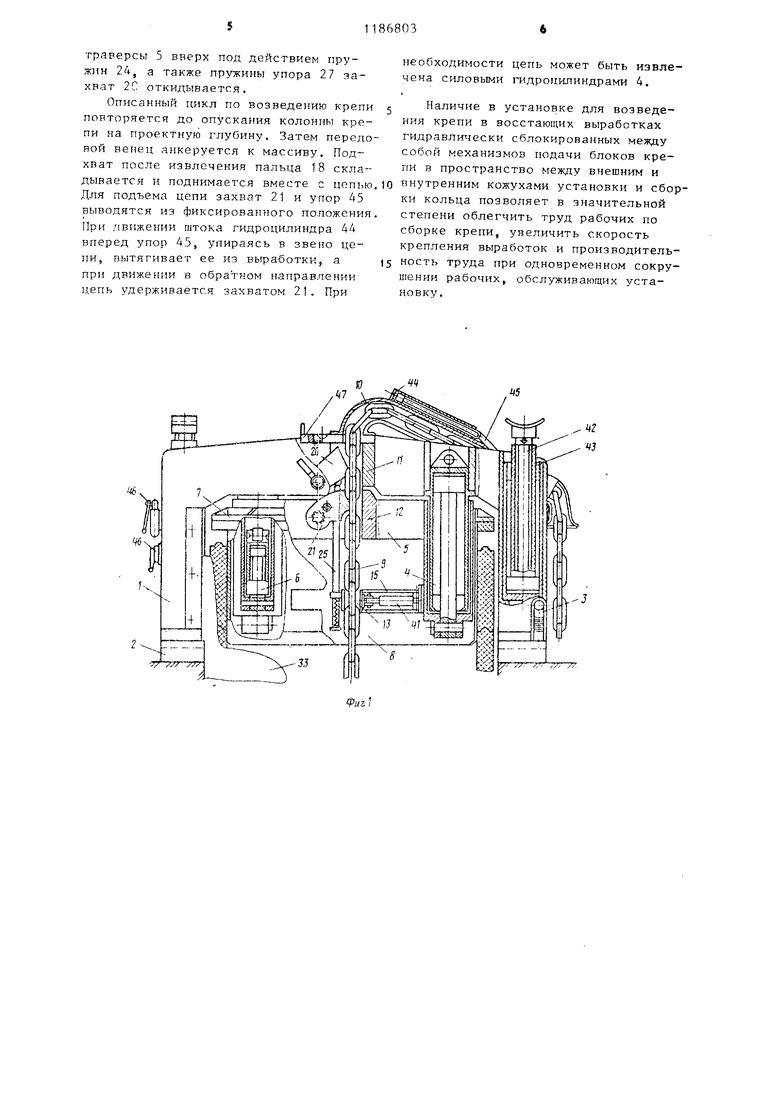
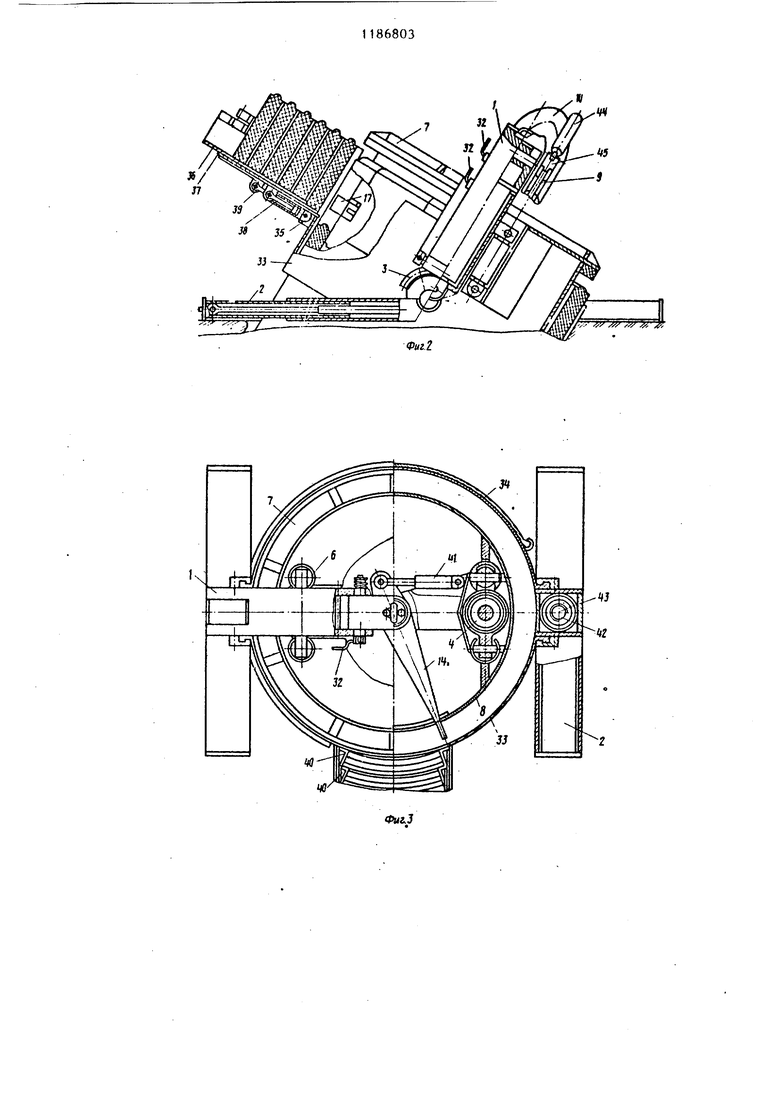
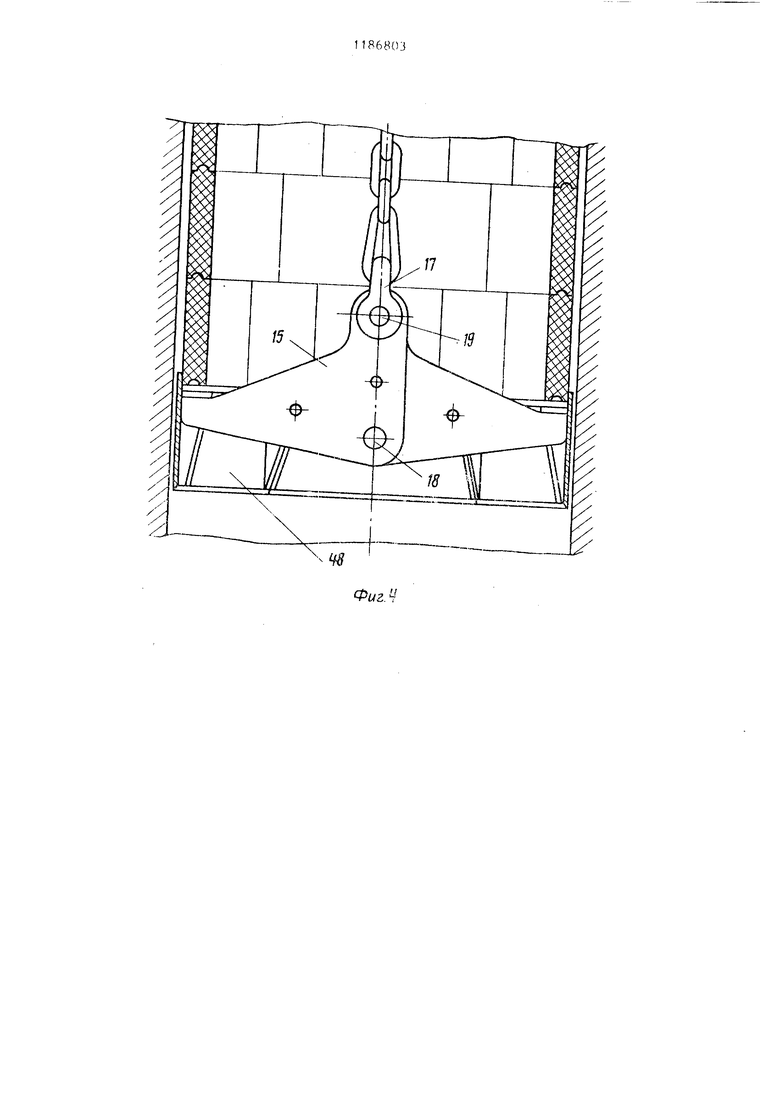
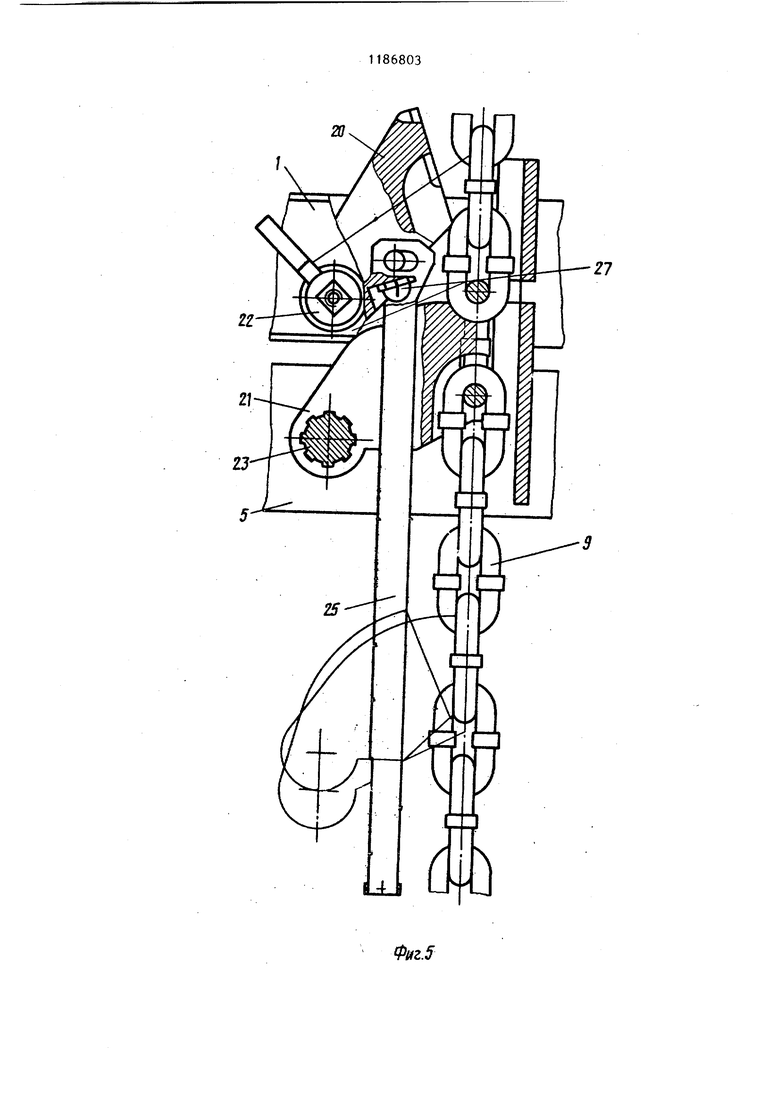
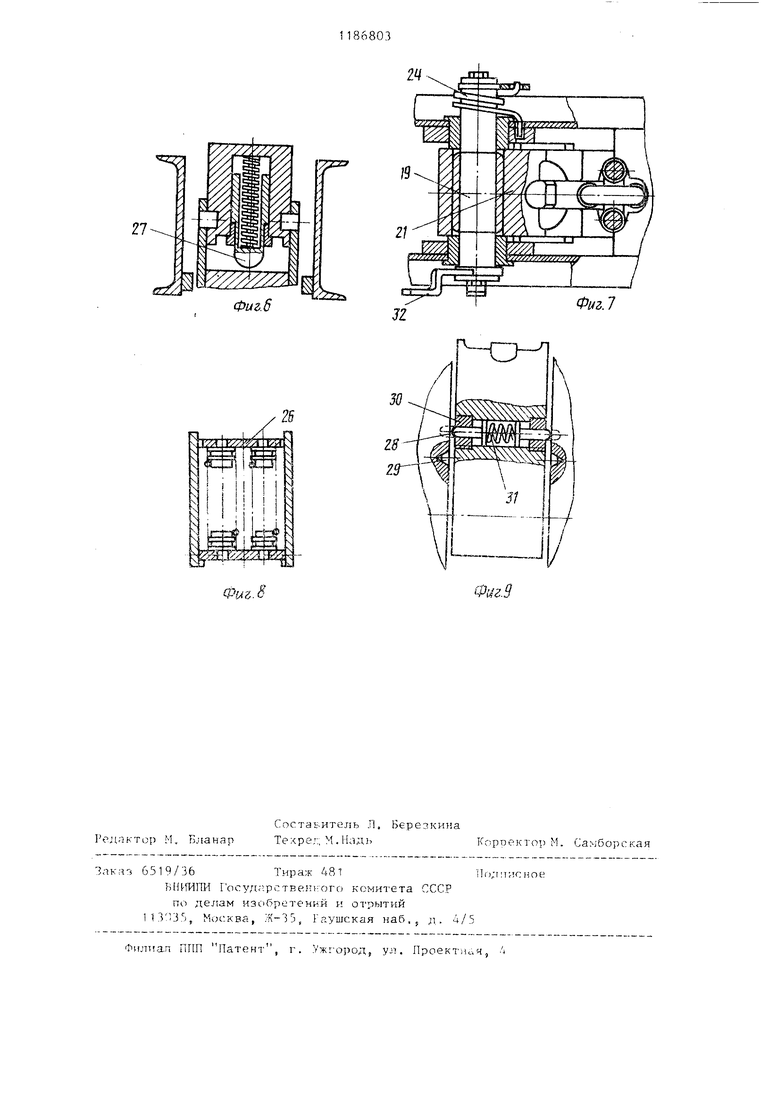
На фиг. 1 тэображеиа усганозка, ра;гмеп1ениая пад устьем выработки, (Hi вид; ;;л фиг, 2 - то же, вид сбо ку; на фигч, 3 - то же, вид сверху; на |/иг, 4 - колонна крепи с передовым вен;V M, подхватом и цепт.ю; ко фиг. 5 механи-зм пергхвата цепи на фиг, 6-9 элементы механг зма перехвата цепи.
Установка имеет п эворотную П-образную 1 шарнирно соедине-гную с льокаьти /, и снабжена механизмом 3 имя наклона рамь; относительно лью;, выполненного в лиде t-еркячной пары, К раме 1 по/гвешг-на с помощью двух силовьгх ,илиндров 4 подвижная траверс; 3, которая с помощью четьрех гидроци.ггиндров 6 предварите,11ьного сжатия крепи соединена с на;кимн -,м венцом 7, а последний жест-со соединен с нну ренним центрирующим кожу:--сом 8. Цепь ; проходит через направляющий клюз И), направляющие 11 а 12, s acaoл{пкенн1.е к центрах верхней ра tt.l i и подпнж1 ой траверсы 5, по.пую ,..ь Г рьтагг: |4 механизма 15 укладки блоь.О п соединяется со складываюш.имСИ полх: атом 15 (не показан) с помоп ьк) с.рьги 17 J который выполнен п пи7{е дггу-.ч SbqaroB, соединенных пальцами 18 и 19,.
Нс:х;1И1 зх перехт ата цепи содегжич;in,T, .: ованнь х по ч-орме гягеньев цепи, захвата 20 и 21, размещенных на ишицевых валах 22 и 23, один в верхней балке рамы, а другой в подвижной траверсе. Под действием пружин 24 верхний захват 20, размещенный в балке рамы, открывается, а н гжний захват 21, размещенный в подвижной траверсе, закрыв.г.ется. Тяга 25 шарнирно прикреплена к верхнему захвату 0 и снабжена подпружиненной планкой 26, Для смягчения ударозз при взаимодействии захватов в верхнем положении подвижной траверсы верхний захват 20 имеет подпружиненный упор 27,
Открытое положение нижнего захвата
21обеспечивается фиксатором, состоящим из стопоров 28, которые входят в специальные гнезда 29 подвижной траверсь, а также направляюгцих втулок 30 и пружины 31, ЦЬшцевые валы
22и 23 снабжены рукоятками 32 для ручного управления захватами.
Ввиду TorOj что пружина 24 стремится постоянно закрыть захват 21 и вы- вод его в фиксированное открытое положение гложет быть осуществлен только тягой 25 мосле закрытия захвата20, обеспечивается надежное удержание цепи. i
На стойках рамы 1 крепятся передняя 33 и задняя 34 половины внешнего кожуха. Причем задняя половина внешнего кожуха выполнена телескопической. На передней по.ловине 33 кожуха
смоятирован механизм 35 подачи б.П:оков крепи, вьгполнентый в виде двух лотков 36 и 37, снабженных гидравлически сблокированным между собой гидроцилиндрами 38 и 39, обеспечивающими возвратно-поступательное движение
лотков в противоположных направлениях. На верхних кромках бортов обоих лотков имеются подпружиненные упоры 40, способные утопать заподлицо со стенками лотков при ходе их назад.
Рычаг 14 механизма 15 укладки блоков шарнирно соединен с гидроцилиндром 41, гидравлически сблокированным с механизмом подачи.
В стойках рамы 1 встроены две пары гидравлических 42 и винтовых 43 распорных стоек. На направляющем клюзе 10 крепится вспомогательный, съемный гидроцилиндр 44 с упором 45 служащий для ускоренного подъема цепи и транспортировки установки волоком по выработкам. На стойке рамы, установлен пульт 46 управления Для фиксации цепи при длительных остановках имеется ручной останов (вилка) 47. Разборный передовой венец 48 служит опорой опускаемой колонны крепи.
Перед возведением крепи к подхвату 16 присоединяется передовой венец 48 и опускается в восстающую выработку, цепь 9 при этом фиксируется ручным остановом 47. С помощью вспомогательного гидроцшшндра 44 установка надвигается на устье восстающей выработки. При помощи механизма 3 наклона раме 1 задается угол, соответствующий углу наклона выработки. Задняя телескопическая половина кожуха 34 раздвигается и с помощью распорных гидравлических 42 и винтовых 43 стоек установка раскрепляется в выработке.
Затем передовой венец 48 подтягивается к нижней кромке внешнего коржуха 33. Подтягивание производится следующим образом.
Подвижная траверса 5 опускается в нижнее положение, захват 21 с помощью рукоятки 32 управления вручную выводится из фиксированного положения, при этом стопоры 28 выходят из гнезд 29, сжимая пружину 31, далее захват 21 под действием пружины 24 захватывает цепь и при ходе подвижной траверсы вверх цепь поднимается, освобождая из-под нагрузки ручной останов 47, что позволяет вручную вывести его из зацепления i: с цепью. В верхнем положении подвижной траверсы цепь вновь фиксируется остановом 47. При повторных циклах
во время опускания подвижной траверсы захват 21 проскальзывает по звен| ям цепи, а при подъеме увлекает цепь с передовым венцом 48.
После приведения передового венца в исходное положение блоки крепи укладываются в лоток 36 механизма 35 подачи. На пульте 46 управления включается автоматически режим работы механизма укладки. Гидроцилиндры 38 и 39 двигают лотки во взаимно обратных направлениях, при этом подпружиненные упоры 40 одного из лотков двигают блоки крепи в направле нии пространства
между кожухами 8 и 33, а упоры другого лотка устанавливают и пропускают блоки крепи. При крайнем положении гидроцилиндров 38 и 39 вкл.очается гидроцилиндр 41 и поворотным рычагом при этом проталкивает блок крепи п кольцевое пространство между кожухами 8 и 32, по достижении крайнего положения гидроцилиндра 41 производится включение гвдроцилиндров 38 и 39 в обратном нлправлении и проталкивание блоков крепи производится другим лотком. Автоматическая работа гидроцилиндров осуществляется путем взаимного переключения золотников в крайних положениях для полной сборки кольца крепи.
Перед опусканием крепи в выработку подвижная траверса 5 включается на подъем и ручной останов вынимается.
Далее осуществляется опускание колонны крепи. Силовые гидроцилиндры 4 при этом включаются на опускание крепи после обеспечения заданного усилия предварительного сжатия крепи гндро- цилиндрами 6. Опускание крепи в сжатом состоянии производится до тех пор, пока захват 21 через подпружиненную планку 26 и тягу 25 не передает усилие на захват 20 и последний захватит цепь. При дальнейшем опускании подвижной траверсы происходит сжатие пружин тяги и при этом захват 21 выходит из зацепления с цепью, отклоняется на угол достаточный для фиксации его в открытом положении стопорами 28, входящими в гнезда 29 под действием пружин 31. После этого силовые гидроцилиндры 4 включаются на подъем подвижной 1раверсы и в верхнем положении захват 21, взаимодействуя через подпружиненный упор 27, вьрсодит из
фиксированного положения и под действием своей пружины входит п зацепление с цепью, при дальнейшем движении
трарерсы 5 вверх под действием пружин 24, а также пружины упора 27 захват 2С откидывается.
Описанный цикл по возведению крепи повторяется до опуска} ия колонны крепи на проектную глубину. Затем передовор) венец анкеруется к массиву. Подхват после извлечения пальца 18 складывается и поднимается вместе с цепью Для подъема цепи захват 21 и упор А5 выводятся из фиксированного положения При ,авижении штока гидроцилиндра 4Д вперед упор 45, упираясь в звено цепи, вытягивает ее из выработки, а при движении в обратном направлении цепь удерживается захватом 21. При
необходимости цепь может быть извлечена силовыми гидроцилиндрами 4.
Наличие в установке для возведения крепи в восстающих выработках гидравлически сблокированных между собой механизмов подачи блоков крепи в пространство между внешним и
внутренним кожухами установки и сборки кольца позволяет в значительной степени облегчить труд рабочих по сборке крепи, увеличить скорость крепления выработок и производительность труда при одновременном сокрушении рабочих, обслуживающих установку.
5
20
Фаг.б
«ZZ7I
222s
Фиг.6
2Ц
.8
Фиг.9
| Способ возведения крепления в восстающих выработках | 1959 |
|
SU142255A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| УСТРОЙСТВО ДЛЯ КОММУТАЦИИ АККУМУЛЯТОРНЫХБАТАРЕЙ | 0 |
|
SU337861A1 |
| Про-копьевск, 1973. | |||
