1
Изобретение относится к подъемно-транспортному оборудованию, а именно к автоматическим крановым грузозахватным устройствам для пакетированных грузов.
Известны крановые захваты для пакетированных грузов, содержащие раму с подвижными траверсами, на которых укреплены захватные лапы, поворачиваемые в горизонтальной плоскости.
Однако для известного захвата необходима установка на раме электропривода, что усложняет его использование на кранах без подвода электроэнергии.
Прототипом изобретения является автоматический захват, содержащий траверсу с гибкими тягами, связанную посредством механизма фиксации с рамой, несущей стойки с подхватными лапами.
Однако этот захват не обеспечивает укладки груза без прокладок.
С целью обеспечения укладки груза без прокладок в предложенном захвате стойки выполнены полыми, а подхватные лапы - подпружиненными и поворотными в вертикальной плоскости; причем захват снабжен подвижными каретками, установленными на раме и несущими двуплечие рычаги, взаимодействующие одними плечами с гибкими тягами, а другими, расположеннымн в полых стойках, - с подхватными лапами.
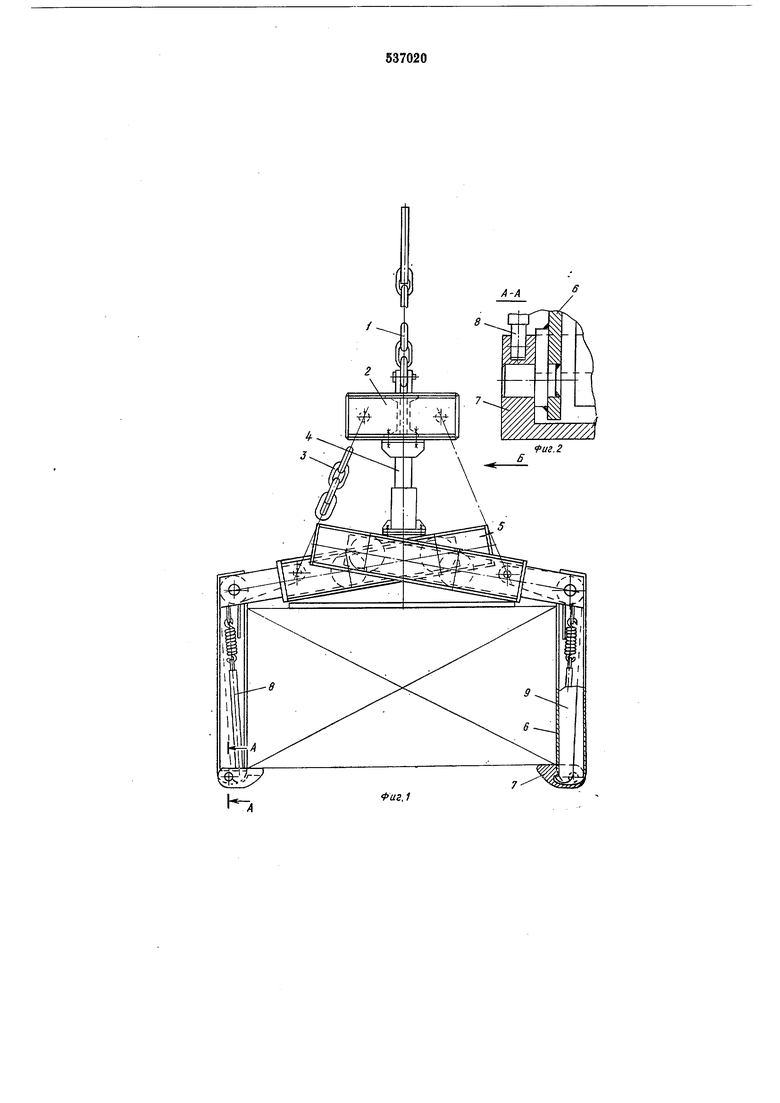
На фиг. 1 изображен автоматический захват, вид сбоку; на фиг. 2-разрез по А-А на фиг. 1; на фиг. 3-вид по стрелке Б на фиг. 1.
Предлагаемый автоматический захват с помощью цепей 1 навещивается на крюк крана (на чертежах ие показан) и содержит траверсу 2 с гибкими тягами 3, связанную посредством механизма 4 фиксации с рамой 5, несущей полые стойки 6 с поворотными в вертикальной плоскости подхватными лапами 7, шарнирно закрепленными в стойках 6 и удерживаемыми подпружиненными тягами 8 в горизонтальном положении. В стойках 6 щарнирно закреплены двуплечие рычаги 9, связанные одним плечом с тягами 3, а другим, снабженным крюком, взаимодействующие с лапами 7. Для обеспечения подъема разных по длине пакетов стойки 6 закреплены на подвижных каретках 10, перемещающихся в раме 5.
Работает захват в автоматическом режиме следующим образом.
Перед захватом груза рычаги 9 разведены в стойках 6, а поворотные лапы 7 находятся в верхнем горизонтальном положении под действием тяг 8; каретки силой собственного веса по наклонным направляющим рамы перемещены вниз до упора; тяги 3 имеют слабину; механизм 4 фиксации звездочкой сцепляет траверсу 2 с рамой 5.
При опускании захвата на груз механизм фиксации срабатывает или от упора рамы 5 о груз, или от контакта лап 7 с полом цеха. При этом расцепляется траверса 2 с рамой 5, подвеска натягивает тяги 3, которые разворачивают рычаги 9, а своими нижними выступами-крюками подхватывают лапу 7 и фиксируют ее от разворота грузом. После этого каретки 10 перемещаются до упора стоек 6 в груз, а лапы 7 заводятся под пачку листового металла. Таким образом происходит захват груза.
При укладке груза взаимодействие элементов захвата происходит в обратном порядке. Рычаги 9 разворачиваются в кожухах за счет веса своих горизонтальных плеч, при этом их выступы-крюки выводятся из-под лап 7. При подъеме захвата лапы 7 разворачиваются в вертикальное положение, растягивая пружины тяг 8, и выводятся из-под груза. По мере освобождения от груза лапы 7 под действием тяг 8 приводятся в исходное положение.
Если же пачка кладется на пачку без прокладок, то при подъеме краном лапы легко освобождаются из-под пачки.
Таким образом предложенное устройство обеспечивает укладку пакетированных грузов без прокладок.
Формула изобретения
Автоматический захват, содержащий траверсу с гибкими тягами, связанную посредством механизма фиксации с рамой, несущей стойки с подхвативши лапами, отличающийся тем, что, с целью обеспечения укладки груза без прокладок, стойки выполнены полыми, а подхватные лапы - подпружиненными и поворотными в вертикальной плоскости, причем захват снабжен подвижными каретками, установленными на раме и несущими двуплечие рычаги, взаимодействующие одними плечами с гибкими тягами, а другими, расположенными в полых стойках, - с подхватными лапами.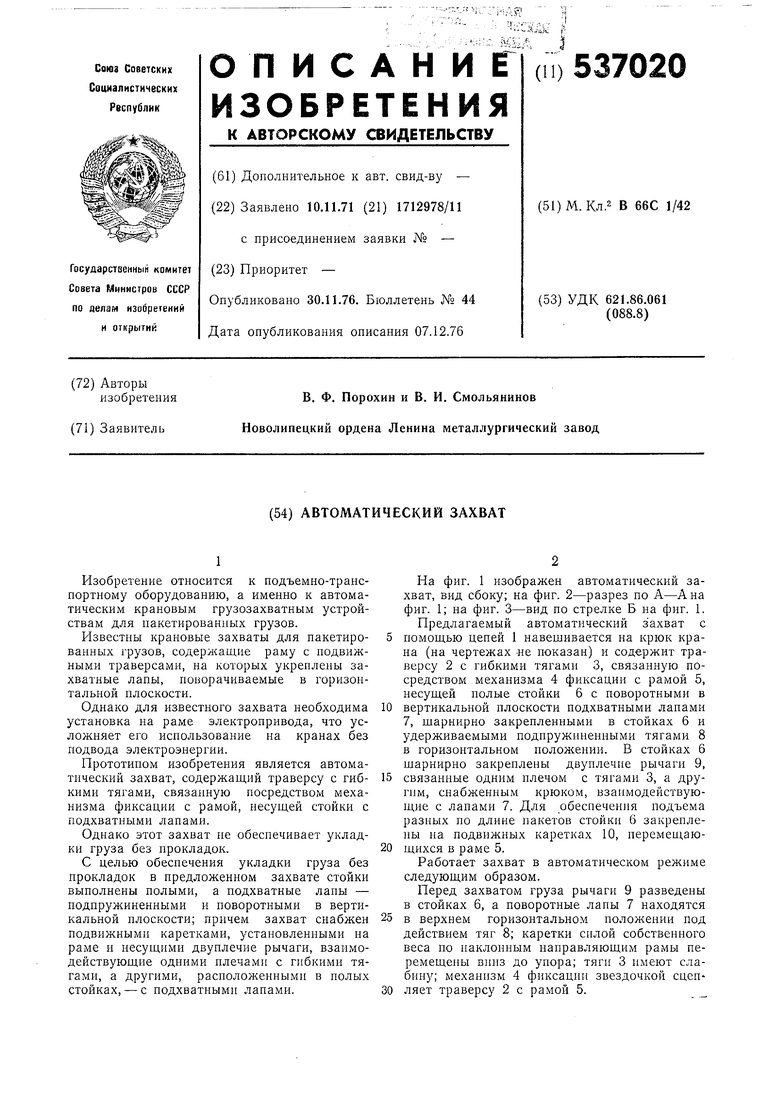
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват | 1970 |
|
SU578255A1 |
| ТРАВЕРСА ДЛЯ ЗАХВАТА ПАКЕТА ШПАЛ | 2008 |
|
RU2376235C1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Захват для пакетов длинномерныхгРузОВ | 1978 |
|
SU796155A1 |
| Захватное устройство для труб | 1980 |
|
SU952720A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Автоматический захват для пакетов груза | 1983 |
|
SU1323514A1 |