(54) ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР и.ПЯ ОБЪЕКТОВ С ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ;:
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1980 |
|
SU911460A2 |
| Многоканальная система экстремального регулирования | 1981 |
|
SU1187147A1 |
| Многоканальная система экстремальногоРЕгулиРОВАНия | 1979 |
|
SU824141A1 |
| СПОСОБ ПОИСКА ЭКСТРЕМУМА СТАТИСТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ИНЕРЦИОННОГО ОБЪЕКТА | 2011 |
|
RU2471220C1 |
| СПОСОБ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЛЕЙНЫХ АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ | 1972 |
|
SU330428A1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| Устройство для управления неустойчивым экстремальным объектом | 1982 |
|
SU1034015A1 |
| Импульсный экстремальный регулятор | 1974 |
|
SU458813A1 |
| Непрерывно-дискретный способ экстремального регулирования | 1975 |
|
SU557350A1 |
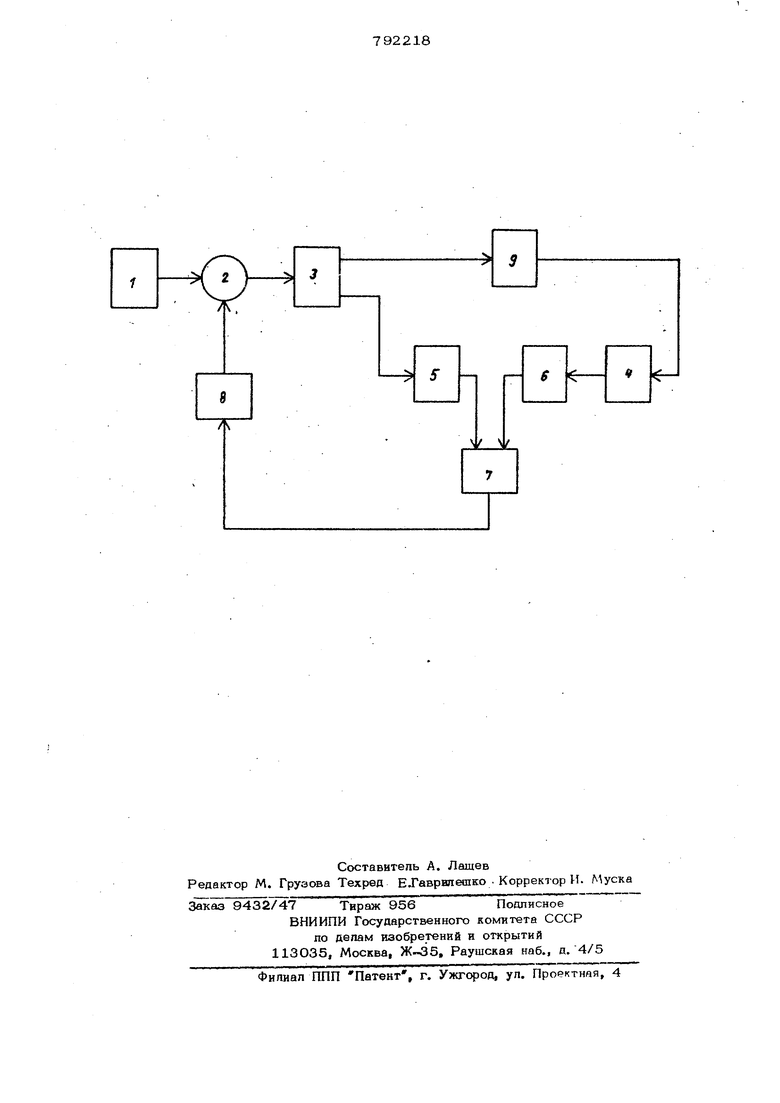
Изобретение относится к области автомйтического управления объектами с экстремальными статическими характеристиками И, в частноста может быть использовано для управления режимом работы зерноочистительной машины на пунктах по слеуборочной обработки зерна. Известна система экстремального управ ления ij, которая содержит обратную мо дель пинейной части объекта, последовательно соединенные множительное звено усилитель и сумматор, второй вход сумма тора соединен с выходом генератора поис ковых сигналов, а выход - со входом интегратора. Недостатком известного регулятора -с устранением фазового сдвига является необходимость задержки сигнала от поискового генератора, подаваемого на вход мно жительного звена, что приводит к усложнению конструкции устройства. Налэтие в устройстве фильтра, обладающего инерционностью, снижает быстродействие и, как следствие этого, точность при поиске экстремума, что особо проявится при малой крутизне дрейфующей статической характеристики объекта. Целью изобретения является повышение точности регулятора. Поставленная цель достигается тем, что регулятор содержит первый и второй дифференциаторы, выходы которък соединены с соответствующими входами -множительного звена, а входы соответственно с выходом интегратора и выходом обратной модели линейной части объекта. На чертеже представлена функциональная схема регулятора. Устройство для экстремального управления инерционным объектом с транспортным запаздыванием содержит генератор 1 поисковых сигналов, сумматор 2, исполнительный орган 3 (интегрирующее звено), обратную модель линейной части объекта 4 с передаточной функцией линейной инерционной части объекта регулирования, дифференциаторы 5 и 6, множительное звено 7, усилитель 8 сигнала обратной связи. 379 Устройство оптимизирует работу объекта 9 регулирования, имеющего экстремальную статическую характеристику и обпадакхцего передаточной функцией линейного инерционного звена с транспортным запаздыванием. Иоисковый сигнал синусоидальной формы с периодом Т. подаваемый на вход объекта 9 регулирования от генератора 1 через сумматор 2 и исполнительный орган 3, одновременно дифференцируется звеном 5 и подается на один из входов множитель ного звена 7, на второй его вход поступает выходной сигнал объекта 9, задержанный на единицу времени Т (Т - время транспортного запаздывания в объекте), проше{,ший через обратную модель объекта 4 и продифференцированный звеном 6. Так как передаточные функции обратной модели объекта 4 .и линейной инерционной части объекта 9 обратны (или почти обратны), то использование обратной модели объекта 4 позволяет устранить нежелательное проявление инерционных свойств объекта 9. Если при этом период возмущающего сигнала Т в натуральное число раз меньше времени транспортного запаздывания Т, то :для любого момента времени от кпик системы на возмущающий поисковый сигнал, действовавший f единиц времени назад совпадает по фазе с вызвавшим его поисковым сигналом. При работе на возрастающей ветви экстремальной статической характеристики объекта (случай поиска максимума), сигнал на выходе множительного звена 7 имеет положительный знак и пропорционален.-произведению производных показателя качества и возмущакяцего воздействия по времени. Усиленный звеном 8 сигнал обратной связи увеличит входной сигнал объекта 9, Для этого же случая при работе на спадающей ветви статической характеристики объекта сигнал . на выходе множительного звена 7 отри-. цателек, следовательно, уменьшается величина входного сигнала объекта 9, Если экстремум статической характеристики объекта носит ми шмaльнъIй характер, то 8Л необходимо изменять знак сигнала обратной связи на противопоставленный. В случае дрейфа экстремума статической характеристики автоколебательный характер работы устройства обеспечивает его поиск, Предлагаемый экстремальный регулятор для объектов с транспортным запаздыванием позволяет устранить влияние фазового сдвига выбором одного из пара- метров поискового сигнала: его периода, а не задержкой этого сигнала, подаваемого на вход множительного знака, специальным звеном запаздывания. За счет исключения,инерционного звена - фильтра и формирования сигнала обратной связи, пропорционального произведению производных показателя качества и возмущающего воздействияпо времени, быстродействие и точность при поиске экстремума пологой дрейфующей статической характеристики выше соответствующих показателей прототипа, помехоустойчивость вполне удовлетворительна. Фррмула изобретения Экстремальный регулятор для объектов с транспортным запаздыванием, содержаший обратную модель линейной части объ- акта, последовательно соединеннъю мно- житещзное звено, усилитель и сумматор второй вход сумматора соединен с выходом генератора поисковых сигналов, а выход - со входом интегратора, о т л и чающийся тем, что, с целью повышения точности регулятора, он содержит первый и второй дифференциаторы, выходы которъ1Х соединенъ с соответствукзщими входами множительного звена, а входъ соответственно - с выходом интегратора и выходом обратной модели линейной части объекта. Источники информации, принятые во внимание при экспертизе 1. Растригин Л. А. Система экстремального управления. М., Машгиз)1974, с. 601 (прототип).
