Изобретение относится к промышленному транспорту, а именно к устройству для перегрузки штучных грузов.
Цель изобретения - повышение производительности.
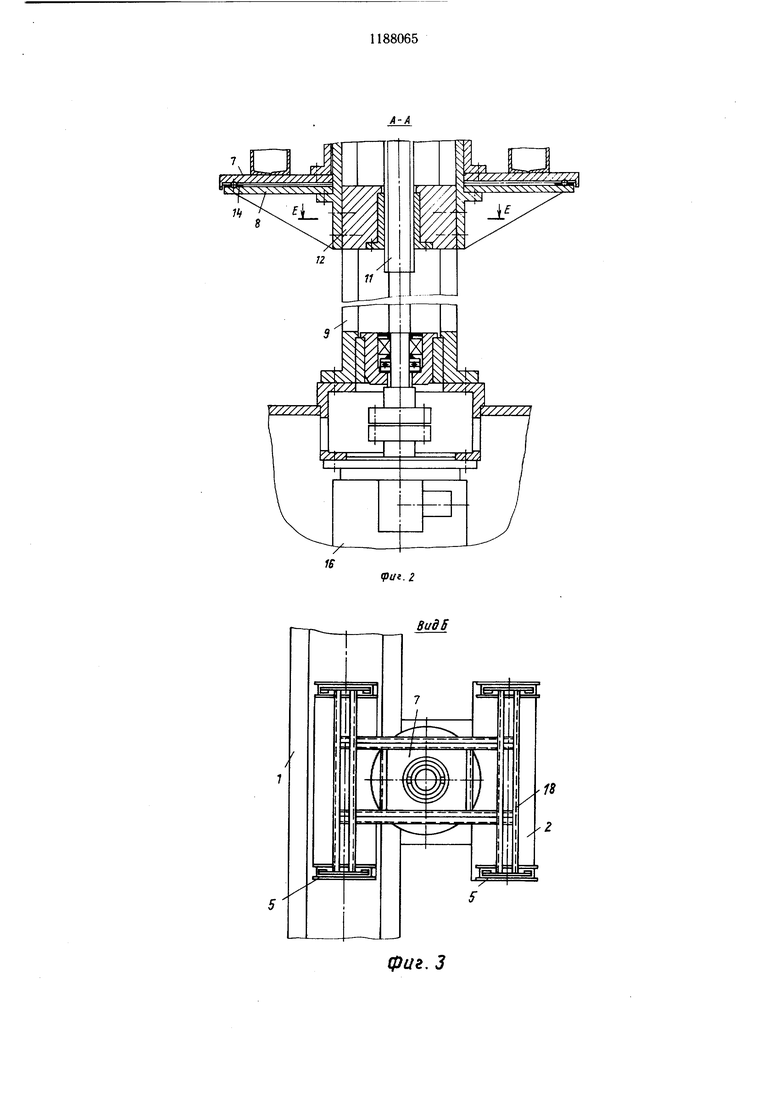
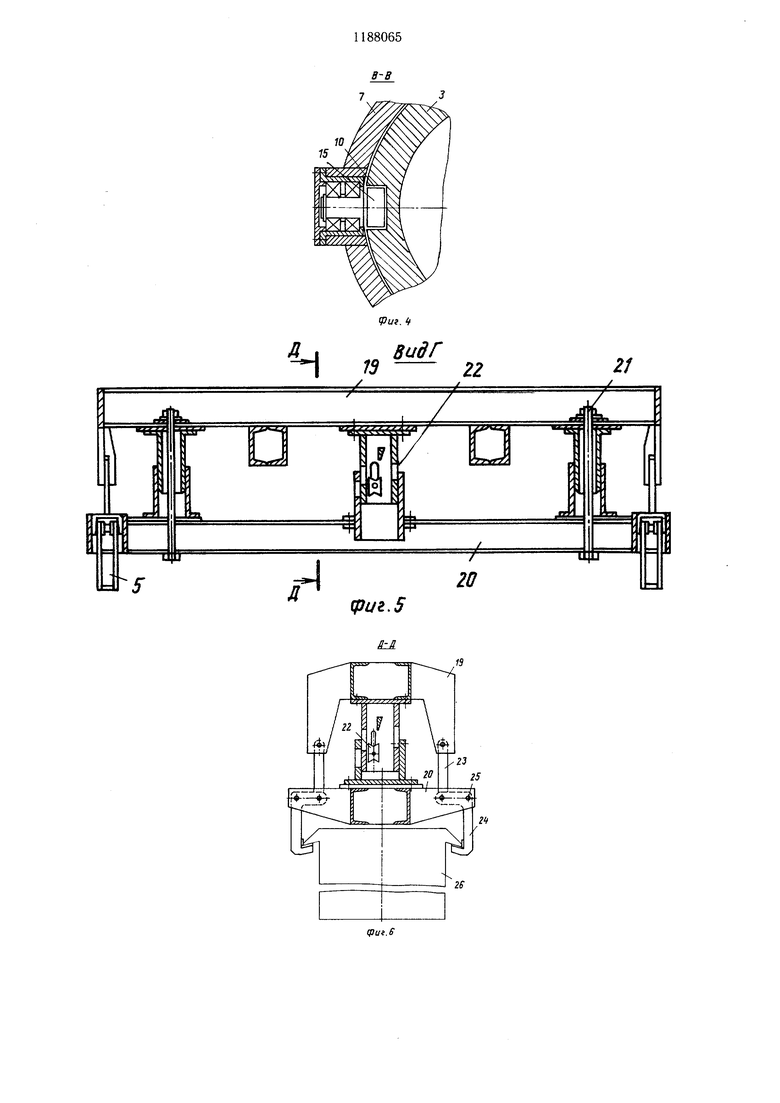
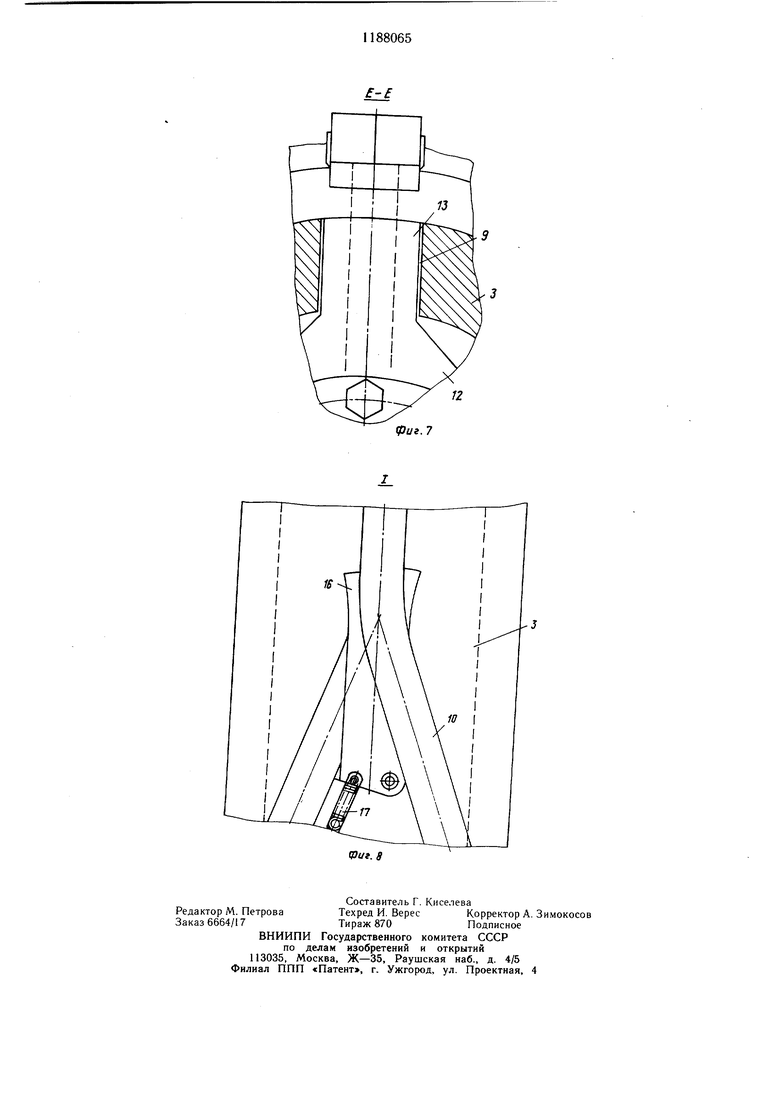
На фиг. 1 показана станция, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - вид Г на фиг. I; на фиг. 6 - разрез Д-Д на фиг. 5; на фиг. 7 - разрез Е-Е на фиг. 2; на фиг. 8 - узел I на фиг. 1.
Устройство для перегрузки штучных грузов используется на станции погрузки-разгрузки, которая содержит также смонтированный соосно с транспортным трубопроводом установки (не показан) желоб 1 и параллельно последнему приемный стол 2. Устройство для перегрузки содержит полую вертикальную колонну 3, установленную между желобом 1 и приемным столом 2 симметрично им. Колонна 3 несет в верхней части 1глатформу 4 с захватами 5 для груза, смонтированную с возможностью возвратнопоступательного перемещения вдоль колонны 3 и поворота вокруг нее от привода 6. Основание платформы 4 выполнено по высоте из двух плит - верхней 7 и нижней 8 На наружной поверхности колонны 3 выполнены два вертикальных 9 и четыре винтовых 10 паза, а в полости колонны 3 соосно с ней размещена винтовая пара, винт И которой связан с приводом 6, а гайка 12 жестко связана с нижней плитой 8 платформы 4 и имеет на наружной поверхности выступы 13 (фиг. 7), размещенные в вертикальных пазах 9 колонны 3. Верхняя плита 7 установлена на нижней плите 8 посредством шаровых опор 14 и снабжена роликами 15, размещенными в винтовых пазах 10 колонны 3. В пазах 10 установлена защелка 16, удерживаемая в одном из положений пружиной 17 (фиг. 8). Кроме того, верхняя плита 7 снабжена также траверсами 18, каждая из которых выполнена по высоте из двух рам - верхней 19 и нижней 20, связанных между собой посредством телескопических тяг 21 с замковым механизмом 22.
Верхняя рама 19 каждой траверсы 18 жестко связана с верхней плитой 7 и с двумя захватами 5.
Каждый захват 5 в конструктивном варианте представляет собой четыре попарно осесимметрично расположенных шарнирных двухзвенника, одно звено 23 каждого из
которых соединено с одного конца с верхней рамой 19, а второе звено 24 представляет собой двуплечий рычаг, опора 25 вращения которого расположена на нижней
раме 20, одно плечо соединено с первым звеном 23 двухзвенника, а другое взаимодействует со съемной грузовой емкостью контейнера 26.
Станция работает следующим образом. В исходном положении платформа поднята, захваты 5 раскрыты и зафиксированы замковым механизмом 22.
При поступлении в желоб 1 из транспортного трубопровода контейнера 26 и необходимости перегрузить его на приемный стол
5 2 включается привод 6 и через посредство винтовой пары 11 -12 платформа 4, а значит и траверсы опускаются. Платформа 4 опускается до положения, в котором нижняя рама 20 соответствующей траверсы 18 касается захватываемой емкости 26. Далее
0 по мере опускания платформы 4 телескопические тяги 21 «складываются, а замковый механизм 22 расфиксируется. В этот момент по сигналу датчика (не показан) дается команда на реверс двигателя привода 6 перемещения платформы 4. Последняя, а значит и верхняя плита 7 и траверса 18 начинают подниматься. При этом поднимается также верхняя рама 19 траверсы, шарнирные двухзвенники «разворачиваются и осуществляют захват груза. Далее при
0 работе двигателя и дальнейшем цодъеме платформы 4 верхняя плита 7, а значит и тра.версы 18 с захваченной емкостью 26 за счет обкатывания роликами 15 (закрепленными на плите 7) винтовых пазов 10 колонны 3 начинают поворот относительно
5 последней на 180°. По окончании этого поворота опять осуществляется реверс двигателя привода 6 и платформа 4 опускается. По мере опускания платформы 4 сначала опускается емкость 26 на приемный
0 стол 2, а затем (по мере дальнейшей работы двигателя) нижняя рама 20 опускается на емкость и далее происходит «складывание телескопических тяг 21, опускание верхней рамы 19 и раскрытие грузозахватного устройства. Желоб 1 установки раз5 гружен.
Так же как траверса 18 работает другая траверса, обеспечивающая за тот же ход всех механизмов станции загрузку контейнера в желобе 1 другой емкостью, что суQ щественно сокращает время, затрачиваемое на обработку контейнеров на станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контейнер для транспортирования по трубопроводам пневмотранспортных установок штучных грузов | 1980 |
|
SU944258A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Транспортное средство | 1989 |
|
SU1668178A1 |
| Погрузочная станция трубопроводного пневмотранспорта для контейнеров с окнами в верхней части | 1985 |
|
SU1303517A1 |
| Грузозахватное устройство | 1986 |
|
SU1440841A1 |
| ТРАВЕРСА ДЛЯ ЗАХВАТА ПАКЕТА ШПАЛ | 2008 |
|
RU2376235C1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| СПОСОБ ПЕРЕГРУЗКИ СТРОЙМАТЕРИАЛОВ И ТРАНСПОРТИРОВКИ К МЕСТУ УКЛАДКИ НА ЭТАЖАХ МОНОЛИТНОГО ЗДАНИЯ И ОСНАСТКА "МАКСИНИО" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2308408C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ГРУЗОПОДЪЕМНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2067935C1 |
УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ, преимущественно контейнеров трубопроводного пневмотранспорта, содержащее вертикальную колонну и захваты для груза, расположенные симметрично относительно продольной оси колонны на платформе, кинематически связанной с колонной с возможностью перемещения от привода н поворота соответственно вдоль и вокруг оси, отличающееся тем, что, с целью повыщения производительности, основание платформы состоит из расположенных горизонтально и связанных между собой посредством шаровых опор плит, нижняя из которых связана с приводом перемещения, а верхняя снабжена рамками и траверсами, состоящими каждая из двух горизонтально размещенных рам, связанных между собой посредством вертикальных телескоп11ческих тяг с фиксатором их раздвинутого положения, еерхняя из которых жестко, связана о верхней плитой и соответствующн у1 захватом, причем колонна С2 выполнена с винтовыми пазами на наружS ной ее поверхности, в которых размещены оолики. 00 О© О5 сд 
BudS
фаг, 3
20
25
M
;
| Перегрузочное устройство для штучных грузов | 1978 |
|
SU715407A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
