сл
4 4
О 00
4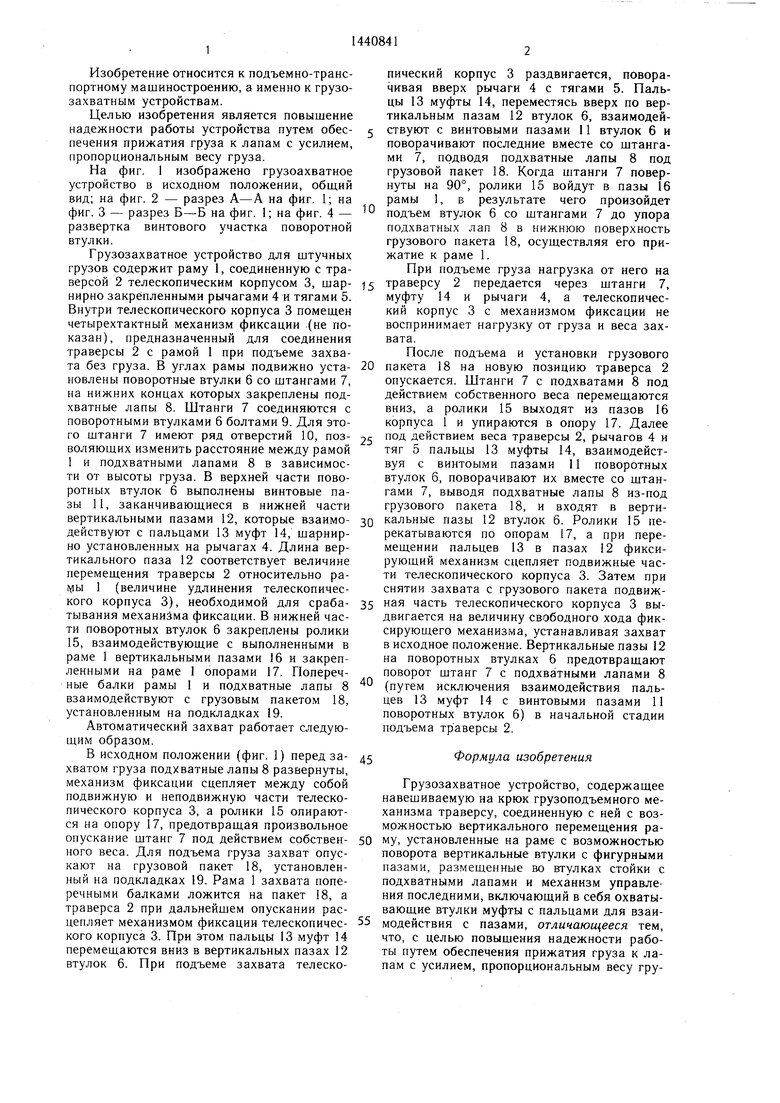
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1970 |
|
SU264650A1 |
| Автоматический захват для штучных грузов | 1974 |
|
SU667482A2 |
| Автоматический захват для штучных грузов | 1976 |
|
SU557035A2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Грузозахватное устройство | 1982 |
|
SU1066931A1 |
| Грузозахватное устройство длягРузОВ C НЕСущиМ пОяСОМ | 1977 |
|
SU821383A1 |

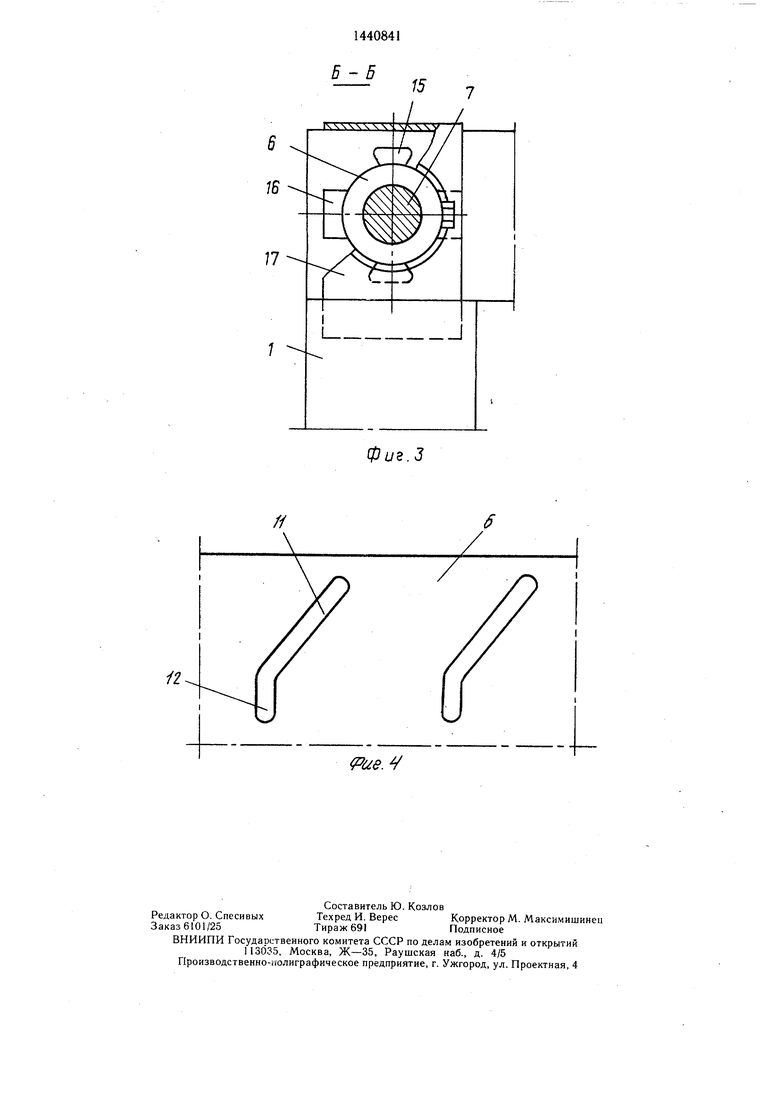
Изобретение относится к подъемно- транспортному машиностроению. Грузозахватное устройство содержит раму 1, соединенную с траверсой 2 механизмом 3 фиксации. На раме во втулках 6 установлены поворотные штанги 7 с лапами 8. В верхней части втулок 6 выполнены винтовые пазы, взаимодействующие с пальцами муфт, щар- нирно установленных на рычагах 4. При захвате груза через винтовые пазы муфт поворачиваются штанги 7 с лапами 8, захватывая груз, а при подъеме устройства груз прижимается снизу к раме 1, что повышает надёжность его удержания. 4 ил.
фигЛ
Изобретение относится к подъемно-транспортному машиностроению, а именно к грузозахватным устройствам.
Целью изобретения является повышение надежности работы устройства путем обеспечения прижатия груза к лапам с усилием, пропорциональным весу груза.
На фиг. 1 изображено грузоахватное устройство в исходном положении, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - развертка винтового участка поворотной втулки.
Грузозахватное устройство для штучных грузов содержит раму 1, соединенную с траверсой 2 телескопическим корпусом 3, шар- нирно закрепленными рычагами 4 и тягами 5. Внутри телескопического корпуса 3 помещен четырехтактный механизм фиксации (не показан), предназначенный для соединения траверсы 2 с рамой 1 при подъеме захвата без груза. В углах рамы подвижно установлены поворотные втулки 6 со штангами 7, на нижних концах которых закреплены под- хватные лапы 8. Штанги 7 соединяются с поворотными втулками 6 болтами 9. Для этого штанги 7 имеют ряд отверстий 10, позволяющих изменить расстояние между рамой 1 и подхватными лапами 8 в зависимости от высоты груза. В верхней части поворотных втулок 6 выполнены винтовые пазы И, заканчивающиеся в нижней части вертикальными пазами 12, которые взаимодействуют с пальцами 13 муфт 14, шарнир- но установленных на рычагах 4. Длина вертикального паза 12 соответствует величине перемещения траверсы 2 относительно ра- tyibi 1 (величине удлинения телескопического корпуса 3), необходимой для срабатывания механизма фиксации. В нижней части поворотных втулок б закреплены ролики 15, взаимодействующие с выполненными в раме 1 вертикальными пазами 16 и закрепленными на раме 1 опорами 17. Поперечные балки рамы 1 и подхватные лапы 8 взаимодействуют с грузовым пакетом 18, установленным на подкладках 19.
Автоматический захват работает следующим образом.
В исходном положении (фиг. 1) перед захватом груза подхватные лапы 8 развернуты, механизм фиксации сцепляет между собой подвижную и неподвижную части телескопического корпуса 3, а ролики 15 опираются на опору 17, предотвращая произвольное опускание штанг 7 под действием собственного веса. Для подъема груза захват опускают на грузовой пакет 18, установленный на подкладках 19. Рама 1 захвата поперечными балками ложится на пакет 18, а траверса 2 при дальнейшем опускании расцепляет механизмом фиксации телескопического корпуса 3. При этом пальцы 13 муфт 14 перемещаются вниз в вертикальных пазах 12 втулок 6. При подъеме захвата телескопический корпус 3 раздвигается, поворачивая вверх рычаги 4 с тягами 5. Пальцы 13 муфты 14, переместясь вверх по вертикальным пазам 12 втулок б, взаимодей- ствуют с винтовыми пазами 11 втулок 6 и поворачивают последние вместе со щтанга- ми 7, подводя подхватные лапы 8 под грузовой пакет 18. Когда щтанги 7 повернуты на 90°, ролики 15 войдут в пазы 16 рамы 1, в результате чего произойдет
О подъем втулок 6 со штангами 7 до упора подхватных лап 8 в нижнюю поверхность грузового пакета 18, осуществляя его прижатие к раме 1.
При подъеме груза нагрузка от него на
5 траверсу 2 передается через щтанги 7, муфту 14 и рычаги 4, а телескопический корпус 3 с механизмом фиксации не воспринимает нагрузку от груза и веса захвата.
После подъема и установки грузового
0 пакета 18 на новую позицию траверса 2 опускается. Штанги 7 с подхватами 8 под действием собственного веса перемещаются вниз, а ролики 15 выходят из пазов 16 корпуса 1 и упираются в опору 17. Далее
5 под действием веса траверсы 2, рычагов 4 и тяг 5 пальцы 13 муфты 14, взаимодействуя с винтоыми пазами 11 поворотных втулок б, поворачивают их вместе со щтан- гами 7, выводя подхватные лапы 8 из-под грузового пакета 18, и входят в верти0 кальные пазы 12 втулок 6. Ролики 15 перекатываются по опорам 17, а при перемещении пальцев 13 в пазах 12 фиксирующий механизм сцепляет подвижные части телескопического корпуса 3. Затем при снятии захвата с грузового пакета подвиж5 ная часть телескопического корпуса 3 выдвигается на величину свободного хода фиксирующего механизма, устанавливая захват в исходное положение. Вертикальные пазы 12 на поворотных втулках б предотвращают поворот штанг 7 с подхватными лапами 8
0 (путем исключения взаимодействия пальцев 13 муфт 14 с винтовыми пазами II поворотных втулок б) в начальной стадии подъема траверсы 2.
45
Формула изобретения
Грузозахватное устройство, содержащее навешиваемую на крюк грузоподъемного механизма траверсу, соединенную с ней с возможностью вертикального перемещения раму, установленные на раме с возможностью поворота вертикальные втулки с фигурными пазами, размещенные во втулках стойки с подхватными лапами и механизм управления последними, включающий в себя охватывающие втулки муфты с пальцами для взаимодействия с пазами, отличающееся тем, что, с целью повышения надежности работы путем обеспечения прижатия груза к лапам с усилием, пропорциональным весу груза, оно снабжено рычагами, одно плечо каждого из которых шарнирно соединено с траверсой, а средняя часть - с поворотной втулкой, тягой, соединяющей второе плечо
4-/1
рычага с рамой, и закрепленными на поворотных втулках роликами, прн этом рама выполнена с опорными площадками и вертикальными пазами для роликов.
Фиг. 2
Фиг.З
ае.
| Захватное приспособление к однолебедочным кранам | 1961 |
|
SU144270A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
