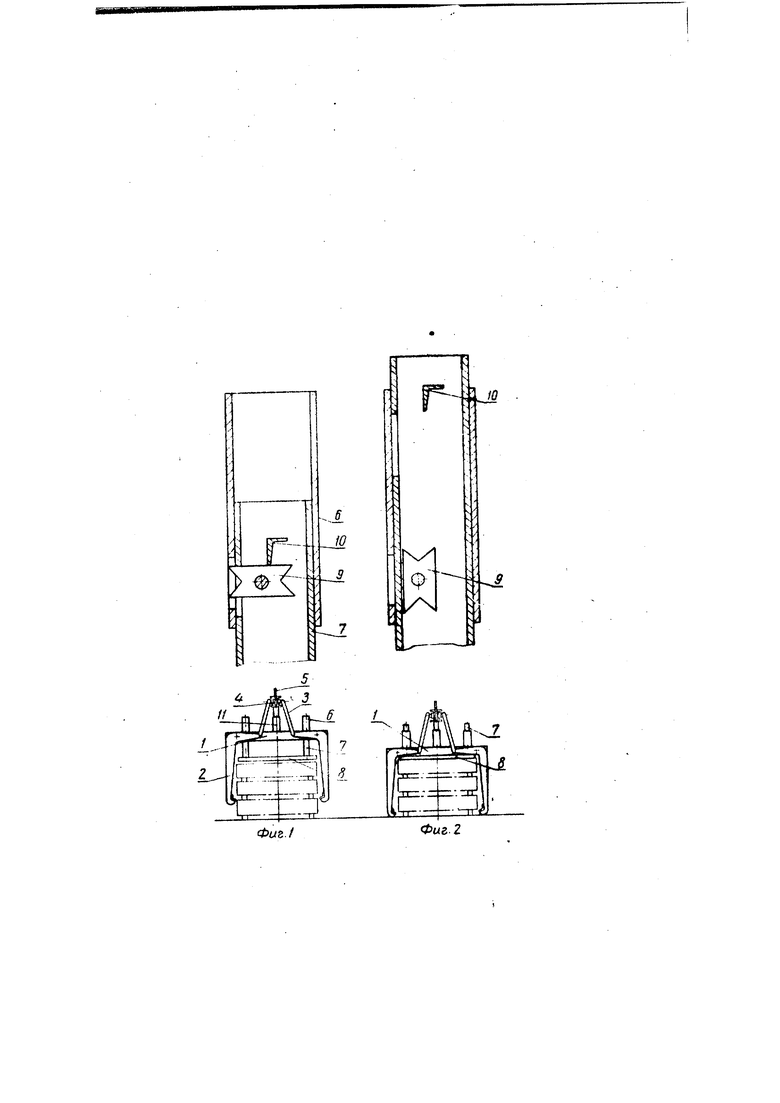
Захваты для пакетов изделий, состоящие из подвешиваемой к крюку крапа рамы с поворотными захватными крючьями, оборудованной переставной для ограничения высоты транспортируемого пакета упорной плито1(, уже известны. Медостатком таких захватов является необходимость ручной переналадки упорной плиты для обеспечения HonepeMCFiHO последовательной перегрузки двух различных по высоте пакетов. Описываемый захват, обеспечивающий автоматическую переналадку у1ториой ПЛИТЫ, выполнен с приме гением фикгирующих механизмов, каждый из которых состоит из закрепленной на раме захвата коробчатой СТОЙКИ с осью свободно-поворотной фиксирующей звездочки, а упорная плита снабжена вертикальными балками коробчатого сечения, свободно йходяшими в коробчатые стойки рамы и несущими упор, воздействующий на фик.сирующую звездочку при крайнем положении плиты, причем в ггрилегающих друг к другу стенках коробчатых балок и коробчатых стоек образованы прорези, поперечные кромки которых взаимодействуют с фнксируюи1,ей звездочкой: ; На фиг. I-4 показаны схемы захвата в различных фазах его рабоч1то цикла и соответстпуюн;ие им положения фиксирующего механизма автоматической переналадки упорной плиты. Захват состоит из рамы /, на которой закреплены оси поворотных захватных крючьев 2, связанных шарнирными тягами 3 с траверсой 4, оборудованной петлей ,5 для иавещивания на крюк грузовой подвески крана. На раме / монтированы также коробчатые стойки 6, в которые свободно входят коробчатые балки 7, несущие упорную плиту 8. Фиксирующие мехаиизмы упорной плиты включают в себя также свободно-поворотные звездочки 9, оси которых закреплены на отойках 6, и упоры 10, закрепленные на балках 7 и для которых предусмотрены соответствующие прорези в стойках 6 и балках 7. Захват оборудован фнк::нруюпи1м уртройством //, которое автоматически связывает травгрсу 4 с рамой
№ 1189Ск5 .
/ при ()Liij((;)iv;icniin 1руза, обссисчипая Э1им самым (jiUKcaunio )i04i,-en 2 в pa:5;u)iuiYTOM положении.
1абоч п | цикл захпата, настроенного на попеременное захватывание трех и двух изделий, осуществляется в следующей последопател1.11ости:
а)захват (фиг. 1) опускается иа пакет из трех изделий. При этом ф1П сирую1дес устройство // удерживает захватные крючья -2 о раздвинутом положепии, а упорная п.тнта 8, под действием силы тяжести, совместно с балками 7. опуи1.ена и крайнее нижнее положение. Упор 0 балки 7 воздействует на звездочку 9, разворачивая ее в направлении по часовой стрелке до ynojia верхней се гран в кромку прорези балки 7;
б)при опускании захвата па пакет (фиг. 2) плита 8 сапрнкасастся с верхиим изделием и совместно е балками 7 смещается относительно траверсы 4. П|)и этом упор W освобождает звездочку 9, которая, взаимодействуя с: кромкой прорези ба.чки 7, разворачипастся м вертикальное поло/кенне.
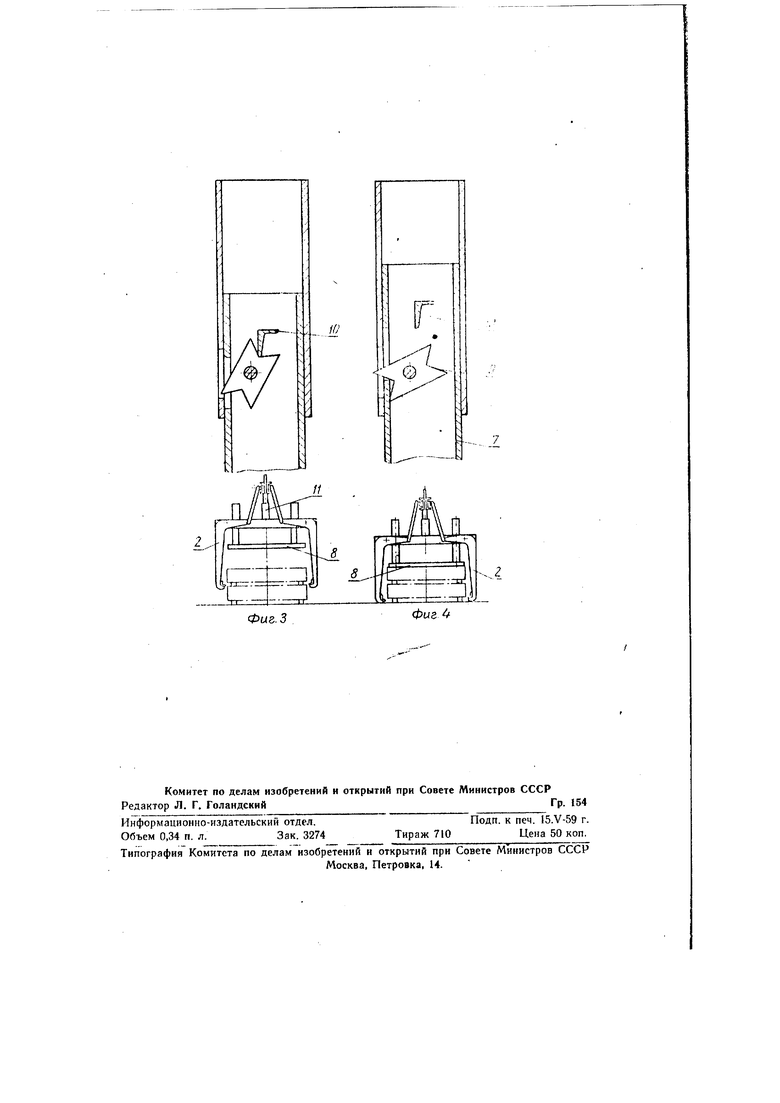
Г1|И1 iioo.ie/tyioHieM подъеме .чахвлтп, го(1тпет1тпу|пии1м иерсключеиием фикснруюп|,е1о ycTpoiicTna //, крючья 2 ;}ахватываюг пакет, который затем транспортируется па место разгрузки, где после устанопки на оснопанпе, крючья 2 оиовь размыкаются.
в)При подъеме захвата (фиг. 3) упорная плита 8 под дей|лвпем собственного веса смещается вниз до тех пор, пока упор W не войдет во взаимодействие со впадиной звездочки 9, разворачивая последнюю на определенный угол по часовой стрелке. В таком положепии захват с крючьями 2, удерживаемыми ф:икснрующим устройством // в разомкиутом положении, опускается на пакет, образованиый двумя изделиями.
г)При опускании захпата иа пакет из двух изделий (фиг. 4), плита 8 входит в соприкссиовенис е верхиим изделием, перемещаясь до тех пор, пока кромка прорези балки 7 не войдет в соприкосновение и не заклинится со впадиной звездочки 9. При дальиейшем onyi KaHHH, захватные крючья 2 смыкаются, а пакет может быть траиспортироваи к месту разгрузки. После освобождения пакета, плита 8 совместно балкой 7 опускается до тех пор, пока упор 10 не развернет звездочку 9 в горизонтальное положение и захват будет подготовлен к забиранию трех изделий и т. д.
П р е д м е т и з о б р е т е н и и
Захват для накетов изделий, состоянии из подве1ииваемой к крюку крана рамы с поворотными зах ват1П:.1ми крючьями, оборудованный тн.рсставной для ограничения высоты тра 1спортнруемого пакета упорной П.ЧИТОЙ, о т л и Ч а ю HJ, и иС я тем, что, с целью автоматической переналадки упорной плиты для обесатечеиия попеременно последовательной перегрузкн двух различных по выеоте пакетов, он выполнен с применением фиксируюирх механизмов, каждый из которых состоит из закрепленной на раме захва1а коробчатой стойки с осью свободно-поворотной фиксируюи;ей звездочки, а упорная плита С1габжена вертикальными балками коробчатого сечения, свободгю вхо/аящими в коробчатые стойки рамы и несущими упор, воздействующий на фиксирующую звездочку при крайнем нижнем положении плиты, причем в прилегающих друг к другу стеиках коробчатых балок и коробчатых стоек образованы прорези, поперечные кромки которых взаимодействуют с фиксирующей звездочкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват с автоматической переналадкой | 1959 |
|
SU125019A1 |
| Автоматический захват | 1957 |
|
SU109523A1 |
| Автоматический захват | 1958 |
|
SU117634A2 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА ПАКЕТОВ ИЗДЕЛИЙ | 1968 |
|
SU219141A1 |
| Захватное устройство для контей-HEPOB | 1979 |
|
SU816932A1 |
| Автоматический захват для железобетонных плит | 1961 |
|
SU144269A1 |
| Автоматический захват | 1960 |
|
SU135619A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| УСТРОЙСТВО ДЛЯ СМЕНЫ ПОГЛОЩАЮЩЕГО АППАРАТА | 2008 |
|
RU2392138C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОЛЫХ КОЛЬЦЕВЫХ ИЗДЕЛИЙ | 1971 |
|
SU302307A1 |