(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ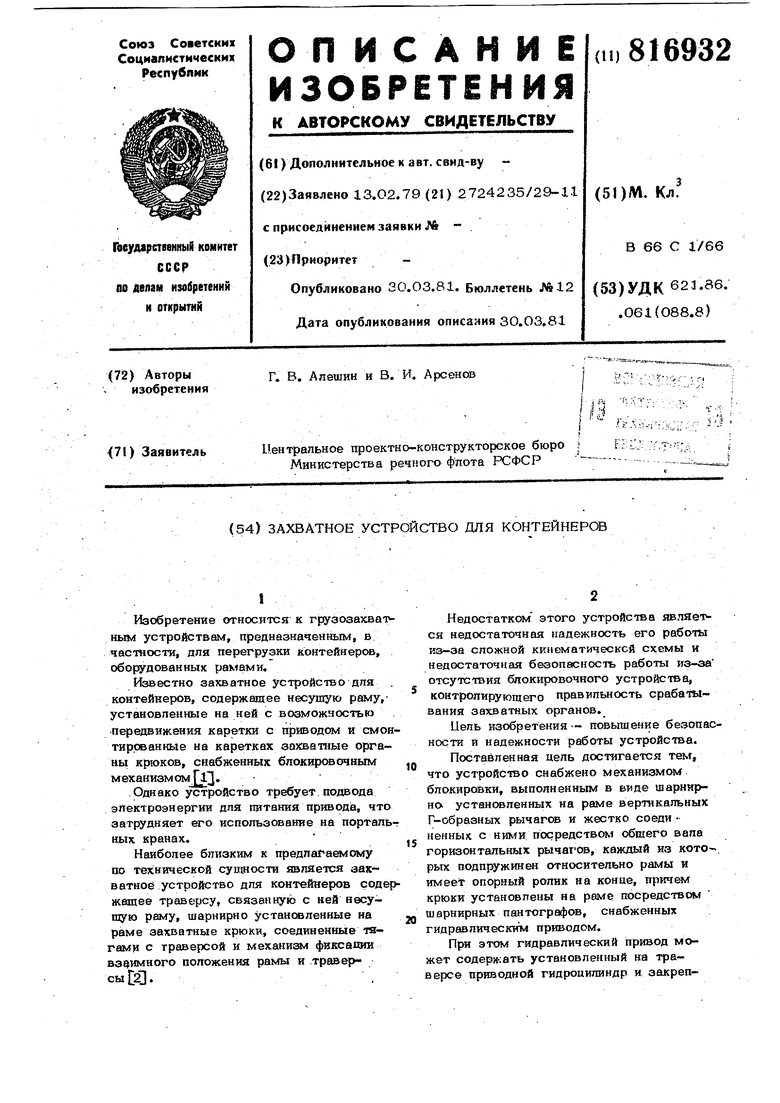
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват | 1957 |
|
SU109523A1 |
| Захват для пакетов изделий | 1958 |
|
SU118963A1 |
| Автоматический захват | 1960 |
|
SU135619A1 |
| Захватная балка для подъема и опускания шандоров в гидротехнических сооружениях | 1936 |
|
SU57028A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Комплекс для штамповки деталей из полосового и ленточного материала | 1983 |
|
SU1199379A1 |
| СТЕНД ДЛЯ СБОРКИ И ДВУСТОРОННЕЙ СВАРКН ЛИСТОВОГО МАТЕРИАЛА В ПОЛОТНИЩА | 1973 |
|
SU366951A1 |
| Захват с автоматической переналадкой | 1959 |
|
SU125019A1 |
I
Изобретение относится к грузозахватным устройствам, предназначенным, в частности, для перегрузки контейнеров, оборудованных рамами.
Известно захватное устройство для контейнеров, содержащее несущую раму,установленнь1е на ней с возможностью передвижения каретки с приводом и смонтирсеанные на каретках захватные органы крюков, снабженных блокировочным механизм ом Г1Д.
.Однако устройство требует подвода .электроэнергии для питания привода, что затрудняет его использование на портальных кранах.
Наиболее близким к предлагаемому по технической сущности является захватное устройство для контейнеров содержащее траверсу, связанную с ней несущую раму, шарнирно установленные на раме захватные крюки, соединенные тягами с траверсой и механиетл фиксапии взаимного положения рамы и траверсы| 2.
Недостатком этого устройства является недостаточная надежность его работы из-за сложной кинематической схемы и Недостаточная безопасность работы из-за отсутствия блокировочного устройства, контролирующего правильность срабатывания захватных органов.
Цель изобретения - повышение безопасности и надежности работы устройства. Поставленная цель достигается тем,
0 что устройство снабжено механизмом блокировки, выполненным в виде шарнирнсх устансжленных на раме вертикальных Г-образных рычагсю и жестко соединенных с посредством общего вала
5 горизонтальных рычагов, каждый нз подпружинен относительно рамы и имеет опорный ролик на конце, причем крюки установлены на раме посредством шарнирных пантографов, снабженных гидравлическим приводом.
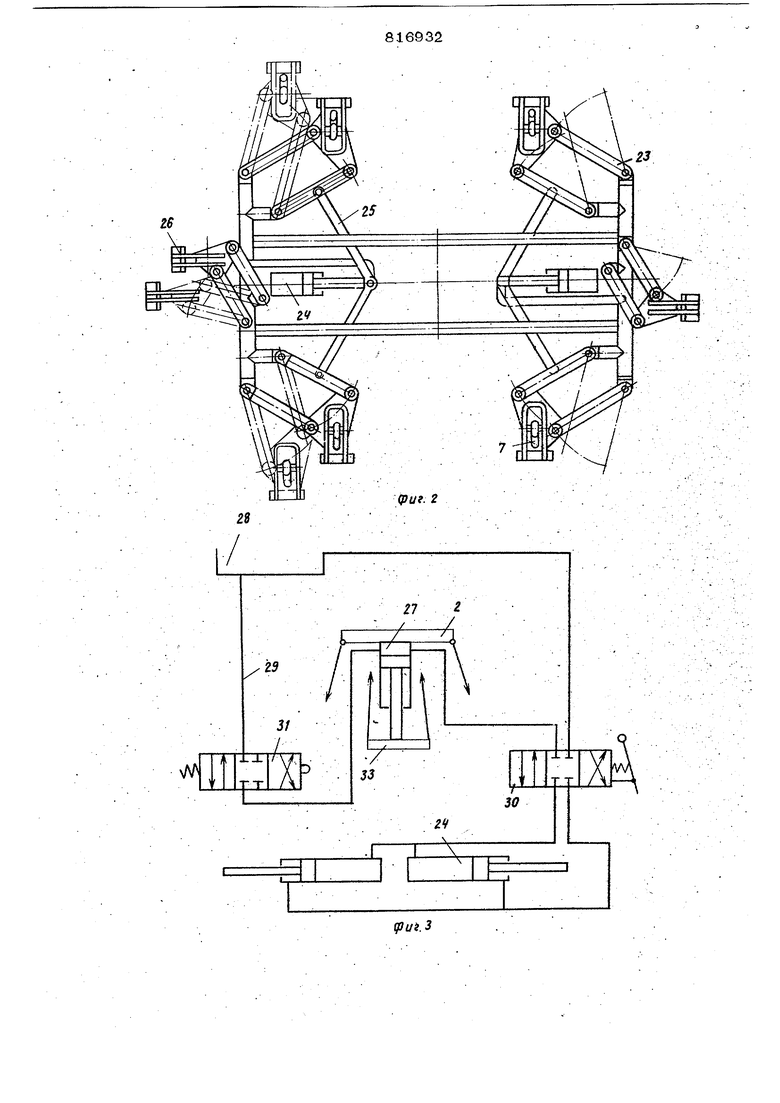
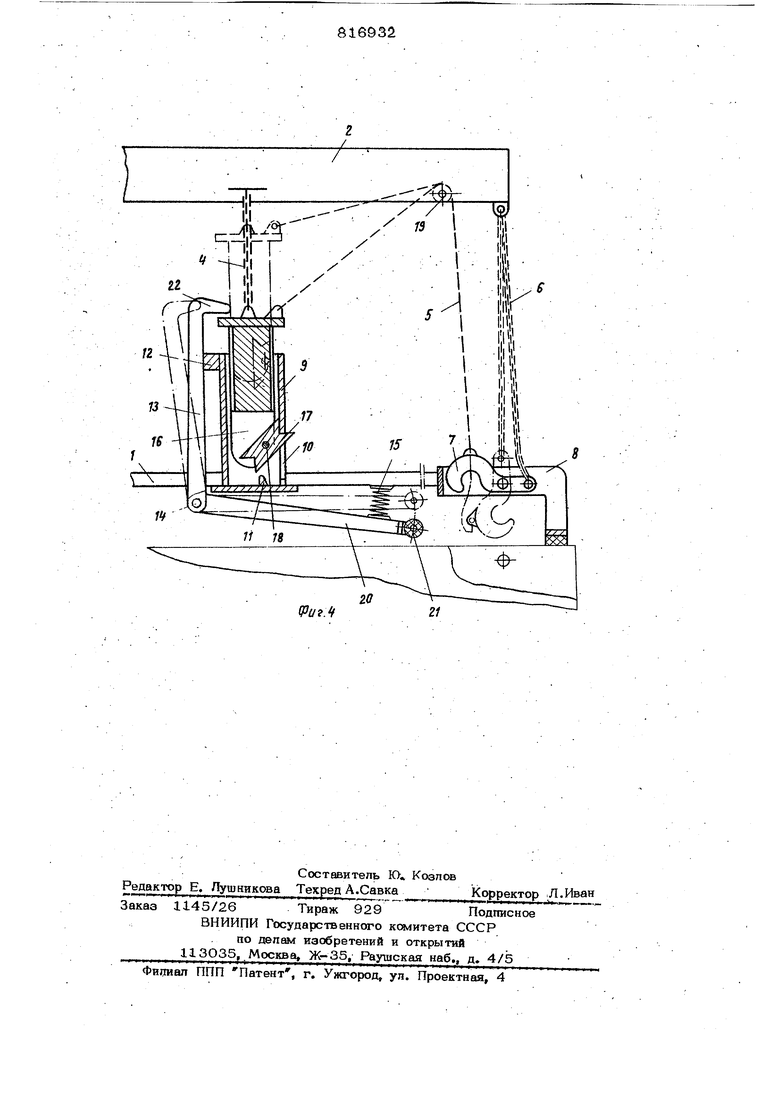
При этом гидравлический привод может содержать установленный на траверсе приводной гидроцитшндр и закрепленные на раме рабочие гидроципиндры, штоки которых соединены с шарнирными пантографами, а полости связаны с полостью приводного гидроцилиндра трубопрсжодами, снабженными блокировочным клапаном и перекидным краном. На фиг. 1 изображено захватное уст ройство для контейнеров, общий вид; на фиг. 2 - то же, вид снизу, на фиг. 3 гидравлическая схема управления, на фиг. 4 - блокировочное устройство с механизмом фиксации. Захватное устройство для контейнеров состоит из рамы 1, соединенной с траверсой 2, на которой жестко смонтирован механизм фиксации 3, соединенный цепью 4 с траверсой 2 и цепями уггравления 5 с механизмами застропки. Траверса 2 соединена грузовыми цепями 6 с поворотными захватными крюками 7, смонтирован нЫми на корпусах-упорах 8. Механизм 3 фиксации состоит из коробчатой стойки 9 с окнами 1О. На днище стойки 9 расположен упор 11, а на боковых кранах стойки 9 - упор 12. На днилге стойки 9 установлены стопорные рьгааги 13 на общем подвижном валике 14 и подпружиненные пружиной 15 относительно рамы 1. Внутри стойки 9 свободно пери тещается вертикальная балка 16 со звездочкой 17, установленной на оси 18. Цепи 5 управления закреплены одНим кондом к верт№кальной балке 16 и перекинуты через бло ки 19, смонтирсеанные на траверсе 2, а другим концом закреплены на крюках 7 На валике 14 свободно закреплены горизонтальные рычаги 2О, оканчивающие ся резиновыми роликами 21. .Рычат 13 имеют 1гб-фиксатор 22. К остову рамы 1 псюоротные захватные крюки 7 присоединяются с помощью шарнирных пантогра фов 23, обеспечивающих перпендикулярно расположение крюков 7 к контейнерным стенкам при любом их перемещении в горизонтальной плоскости. Это пери«гещение осуществляется рабочими гидроцилиндрами 24, установленными на раме, штоки которых связаны с пантографами 23 через тяги 25. Направляющая 2б установлена также на шарнирном пантографе наз начение направляющей - фиксирование за ватного устройства Б продольном направ лении относительно контейнера. Устройство снабжено гидравлической системой упршления пантографами 23, состоящей из гидроцилиндрсж 24, приводно 1-11Дроцилиндра 27, расходного расширительного бака 28, трубопроводов 29, ручного перекидного крана 30 и блокиовочного клапана 31. Приводной гидроилиндр 27 установлен между гибкой подеской 32 и траверсой 2 захвата, причем, ток цилиндра 27 соединен с площадкой 3, подвешенной к гибкой подвеске 32, корпус гидроцилиндра закреплен к дугам раверсы 2. Ручной перекидной кран 30 меет два рабочих положения, В первом абочем положении нагнетательная поость приводного гидроцилиндра соединятся с наружной полостью рабочих гидроилиндров 24 и при подъеме захвата бует происходить установка шарнирной амы захвата на минимальный размер. о втором рабочем положении нагнетатеьная полость приводного гидроцилиндра 7 будет соединена с внутренней поостью рабочего гидроцилиндра 24 и арнирная рама 1 самоустансюится на аксимальный размер раздвижки. Захватное устройство работает Следующим образом. В исходном положении перед наведением устройства на поднимаемый контейнер вертикальная балка 16 находится в нижнем положении, звездочка 17 в зацеплении с коробчатой стойкой 9, цепи 5 управления натянуты, цепи 6 грузовые прослаблены, захватные крюки 7 в горизонтальном положении подняты (как изображено на фиг. 4). При правильном наведении устройства на контейнер, при опускании захвата упоры 8 войдут в ниши контейнера, а рычаги 20, взаимодействуя с крышей контейнера, через ролик 21 сожмут пружины 15, а рычаги 13с зубьямиг-фиксаторами отклонятся в стороны, освободив зону перемещения вертикальной белки 16. Одновременно при опускании вертикальная балка 16 перемещается в крайнее нижнее положение, при этом звездочка 17, соприкоснувшись с упором 11, разворачивается таким образом, что два верхних конца ее выходят через окно 10 наружу коробчатой стойки 9. При подъеме устройства натягивается цепь 4, перемещая вертикальную балку 16 вверх и удлиняя цепь 5 управления, затем натягиваются грузовые цепи 6, псеорачивая захватные крюки 7 в рабочее положение. При дальнейшем подъеме происходит захват контейнера. При неточном наведении устройства на контейнер, если хотя бы один из упоров 8 не войдет в нишу контейнера (опустится на крышку контейнера), то соответствующий рычаг 20 не отожмется вверх и не выведет зуб-фиксатор 22 из зацепления с балкой 16 и при последующа«1 подъеме не позволит переместиться вверх вертикальной балке 16, 13 результате четыре крюка 7 останутся в горизонтальном положении и застропки контейнера не произойдет. В этом случае необходимо поднять устройство и снова опустить его на крышу контейнера, при этом вертикальная балка 16 переместится в крайнее нижнее полсйкение и под действием упора 11 звездочка 17 разворачивается и при последующем подъеме захвата зацепляемся за стенку окна 10 коробчатой стойки 9. Цепи 5 управления остаются натянутыми, захватные крюки 7 остаются в исходном положении. Таким образом, при неправильном наведении устройства на контейнер приходится выполнять дополнительно его опускание и подъем. При опускании застропленного контейнера ослабевают все цепи 4-6, вертикальная балка .16 перемещается в крайнее нижнее положение под действием упора 11, звездочка 17 разворачивается на угол около 45 vi при последуюпгем подъе ме зацепляется за боковые грани окна 1О коробчатой стойки 9, цепи 5 управ ления Оказываются натянутыми, а захват ные крюки 7 занимаЪт горизонтальное положение. Происходит отстропка контейнера. Для переналадки захватного устройств на подъем 3-х или 5-ти тонного контейнера устройство опускается на 70О120О мм от уровня пола. рабо чий нажимает рукоятку перекидного крана (трехходового золотника) ЗО, при этом рабочая полость приводного гидроцилиндр 27 соединяются с гидродилиндрами 24 рабочими, Давление жидкости, образуемое массой захватного устройства, соединенного с корпусом гидроцилиндра 27, воздействует на жидкость, расположенную между корпусом гидроцилиндра и поршнем гидроцилиндра 27, соединенным с гибкой подвеской 32. Рабочий гидроцилиндр 24 воздействует через рычажную систет у-. (тяги) 25 на шарнирные пантографы 23, перанешая в нужное положение крюки 7 и направл5попгие 26. В то время, когда одна из полостей рабочих цилиндров 24 соединена с цилиндром 2 7,другая полость рабочих цилиндров 24 соединена с расход ным расширительным баком 28. По окончании переналадки захватного устрой826 ства, оно опускается на плоскую опору (например рельс крана, несущего qaxearное устройство), при этом шток клапана бпокирсеочного ( 2-х золотника) 31 (от воздействия массы захвата через шток на,рельс) соединяет расхо/ьный бак 28 с рабочей полостью гидроцилиндра 27. Гибкая подвеска 32 медленно опускается, происходит заполнение рабочей полости гидроцилиндра 27 само теком жидкостью. Устройство готово . для выполнения очередного рабочего цикла. Формула изобре те н и я 1.Захватное устройство для контейнеров, содержащее траверсу, связанную с ней несущую раму, шарнирно установленные на раме захватные крюки, соединенные тягами с траверсой и механизм фиксации взаимного положения рамы и траверсы, Отличающееся; тем, что, с целью повышения безопасности и надежности работы устройства, оно снабжено механизмом блокировки, включающим в себя шарнирно установленные на раме . вертикальные Г-образные рычаги и жеспко соединенные с ними посредством об- щего вала, горизонтальные рычаги, каждый из которых подпружинен относительно рамы и имеет опорный ролик на конце , причем крюки установлены на раме посредством шарнирных пантографов, снабженных гидравлическим приводом. 2,Устройство по п. 1, о т я и ч а ю 1П е е с я тем, что гидравлический привод содержит установленный на траверее приводной гидроципиндр и закреппеншле на раме рабочие Гидроцилиндры, штоки которых соединены с шарнирными пантографами, а полости связаны с полостью приводного гндроиилиндра трубопроводами, снабженными блокировочным клапаном и п екидным краном. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N9 288267, кп. В 66 С 1/66, 197О. 2.Авторское свидетельство СССР № 176376, кл. В 66 С 1/66, 1967 (прототип).
(риг 2
с.
-W.
/
/
Vu.4
/ / I X
|v
и I
J Iill
