2.Механизм по п. 1, отличающийся тем, что кинематическая связь каждой считывающей иглы с включающими иглами выполнена в виде коромысла, установленного параллельно коромыслу, несущему включающие иглы, щарнирно связанного концами с включающими иглами, а осью поворота - со считывающей иглой, при этом отнощение длин плеч коромысла,, ,(;.вязанного со считывающей иглой, равно отношению длин плеч коромысла, несущего включающие иглы.
3.Механизм по пп. 1 и 2, отличающийся тем, что рабочий конец одной из включающих игл смещен относительно ее основания в плоскости, проходящей через включающие иглы.
4.Механизм по пп. 1-3, отличающийся тем, что ось рычага, несущего подвижные ножи, расположена между программоносителем и считывающими иглами на прямой, соединяющей рабочие концы включающих игл в нижнем положении, или ниже этой прямой.
5.Механизм по пп. 1-3, отличающийся тем, что ось рычага, несущего подвижные ножи, расположена относительно считывающих игл со стороны, противоположной программоносителю, на прямой, соединяющей рабочие концы включающих игл в верхнем положении, или выще этой прямой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1285083A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1988 |
|
SU1527338A1 |
| Ротационная ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1009280A3 |
| ПРИВОД РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА | 1990 |
|
RU2009282C1 |
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА К ТКАЦКОМУ СТАНКУ | 1995 |
|
RU2090675C1 |
| Двухподъемная негативная ремизоподъемная каретка ткацкого станка | 1990 |
|
SU1813130A3 |
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |
| Ремизоподъемная каретка ткацкого станка | 1985 |
|
SU1449598A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1979 |
|
SU1087580A2 |
| Программирующий механизм узорообразующего устройства текстильной машины | 1986 |
|
SU1442578A1 |
1. МЕХАНИЗМ УПРАВЛЕНИЯ РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА, содержащий программоноситель, по числу ремизок станка считываюI 9 щне иглы, каждая из которых кинематически связана с парой включающих игл, установленных с возможностью поочередного контакта с установленными на концах рычагов, связанных с приводом станка, подвижными ножами, и смонтированных на опорном элементе, кинематически связанном с переключателем положения ремизки, отличающийся тем, что, с целью повышения надежности его работы, опорный элемент включающих игл выполнен в виде коромысла, включающие иглы расположены по обе стороны от оси поворота коромысла и шарнирно соединены с последним, а подвижные ножи жестко соединены между собой, при этом отношение расстояний от рабочих кромок ножей до оси качания рычага равно отноi шению расстояний от соответствующих включающих игл до оси поворота коромысла. (Л ги 00 со
1
Изобретение относится к текстильному мащиност роению.
Целью изобретения является повыщение надежности работы механизма.
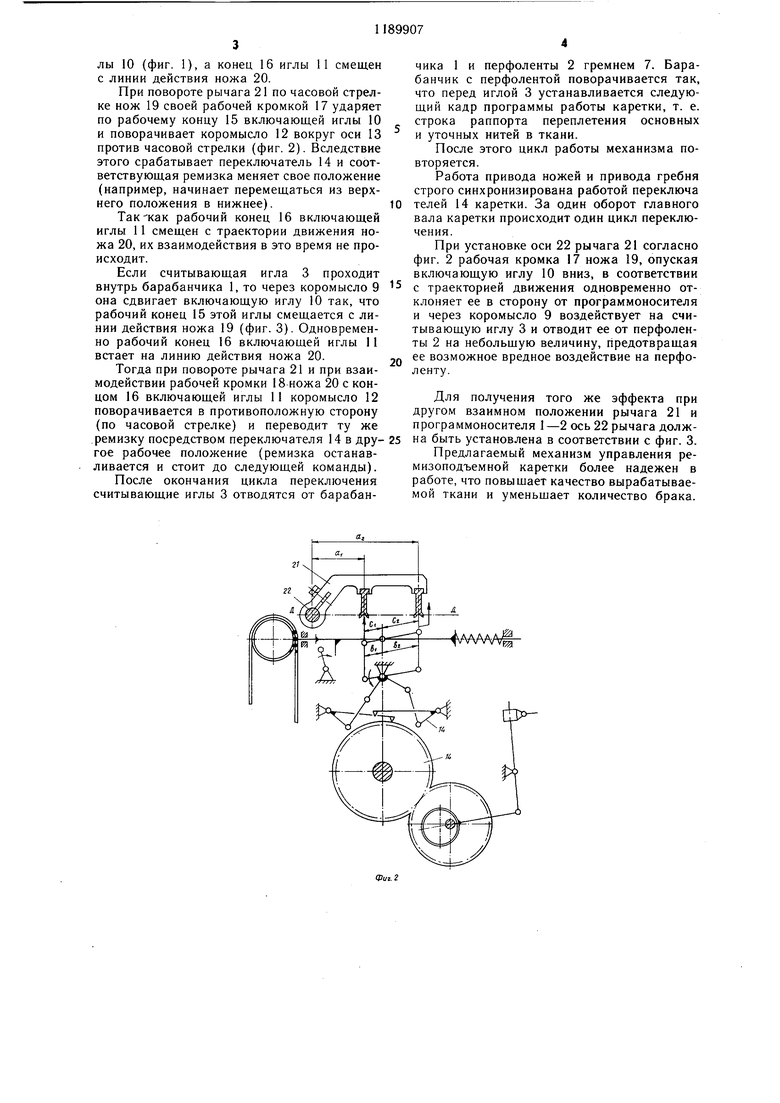
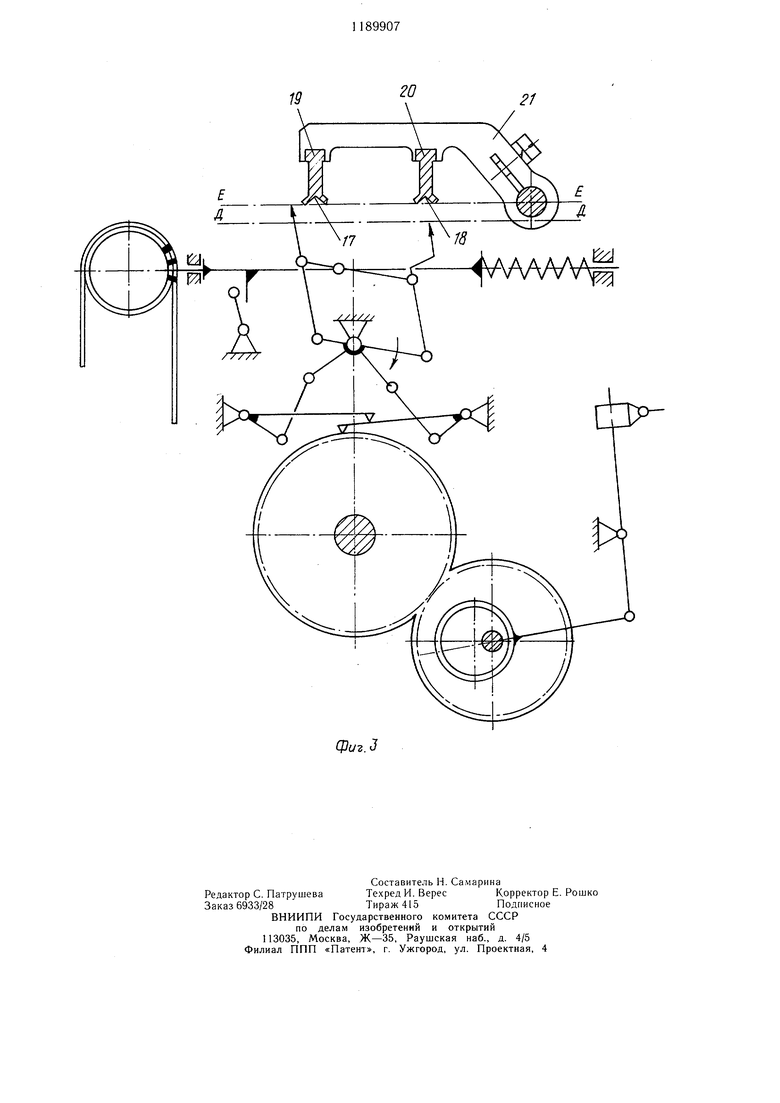
На фиг. 1 показан механизм управления ремизоподъемной каретки во время смены программы (ось рычага ножей между программоносителем и считывающими иглами); на фиг. 2 - то же, во время переключения работы силового переключателя, ножи в нижнем положени; на фиг. 3 - то же, во время смены программы при расположении оси рычага ножей относительно считывающих игл со стороны, противоположной программоносителю.
Механизм управления ремизоподъемной каретки содержит программоноситель в виде барабанчика 1 с перфолентой 2, с которой взаимодействуют считывающие иглы 3, число которых равно числу ремизок станка. Каждая считывающая игла 3 установлена в неподвижных направляющих 4 и 5 и прижата к перфоленте 2 пружиной 6. Для отвода считывающих игл от барабанчика 1 служит общий для всех игл 3 качающийся гребень 7 (привод не показан), вал которого закреплен на корпусе каретки.
Каждая считывающая игла 3 щарнирно связана с осью поворота 8 коромысла 9, которое соединяет две включающие иглы 10 и 11. Коромысло 9 в данном примере установлено параллельно коромыслу 12, на котором своими основаниями щарнирно закреплены включающие иглы 10 и 11.
Одновременно коромысло 12 с осью поворота 13 является ведущим звеном переключателя положения ремизки 14.
Верхние рабочие концы 15 и 16 включающих игл 10 и 11 расположены под рабочими кромками 17 и 18 ножей 19 и 20, которые являются общими для всего механизма.
Ножи жестко соединены между собой единым рычагом 21, качающимся от привода (не показан) вокруг оси 22.
Плечи коромысел 9 и 12 и рычага 21
находятся в следующем отношении -
а2
Ь, С| Б Са
Рабочий конец 16 одной из включающих
игл 11 смещен относительно ее основания в плоскости, проходящей через включающие иглы.
При расположении оси 22 рычага 21 между программоносителем 1-2 и считывающими иглами 3 эта ось лежит на линии
(или ниже), соответствующей нижнему положению рабочих концов 15 и 16 включающих игл 10 и 11 (фиг. 2).
При расположении оси 22 рычага 21 относительно считывающих игл 3 со стороны, противоположной программоносителю 1-2,
эта ось лежит на линии Е-Е (или выще), соответствующей верхнему положению рабочих концов 15 и 16 включающих игл 10 и 11 (фиг. 3).
Механизм управления ремизоподъемной
каретки работает следующим образом.
Перфолента 2 несет информацию, в соответствии с которой считывающие иглы 9 или опираются на перфоленту, или проходят через ее отверстия внутрь барабанчика 1 под действием пружины 6.
Перемещение считывающей иглы 3 передается через коромысло 9 включающим иглам 10 и 11 и поочередно устанавливает их рабочие концы 15 и 16 на траекторию движения соответствующего ножа 19 или 20. Если считывающая игла 3 упирается в
перфоленту 2, то под рабочей кромкой 17 ножа 19 оказывается рабочий конец 15 иглы 10 (фиг. 1), а конец 16 иглы 11 смещен с линии действия ножа 20. При повороте рычага 21 по часовой стрелке нож 19 своей рабочей кромкой 17 ударяет по рабочему концу 15 включающей иглы 10 и поворачивает коромысло 12 вокруг оси 13 против часовой стрелки (фиг. 2). Вследствие этого срабатывает переключатель 14 и соответствующая ремизка меняет свое положение (например, начинает перемещаться из верхнего положения в нижнее). Так как рабочий конец 16 включающей иглы 11 смещен с траектории движения ножа 20, их взаимодействия в это время не происходит. Если считывающая игла 3 проходит внутрь барабанчика 1, то через коромысло 9 она сдвигает включающую иглу 10 так, что рабочий конец 15 этой иглы смещается с линии действия ножа 19 (фиг. 3). Одновременно рабочий конец 16 включающей иглы II встает на линию действия ножа 20. Тогда при повороте рычага 21 и при взаимодействии рабочей кромки 18 ножа 20 с концом 16 включающей иглы 11 коромысло 12 поворачивается в противоположную сторону (по часовой стрелке) и переводит ту же ремизку посредством переключателя 14 в дру roe рабочее положение (ремизка останавливается и стоит до следующей команды). После окончания цикла переключения считывающие иглы 3 отводятся от барабан4МЛА |чика 1 и перфоленты 2 гремнем 7. Барабанчик с перфолентой поворачивается так, что перед иглой 3 устанавливается следующий кадр программы работы каретки, т. е. строка раппорта переплетения основных и уточных нитей в ткани. После этого цикл работы механизма повторяется. Работа привода ножей и привода гребня строго синхронизирована работой переключа телей 14 каретки. За один оборот главного вала каретки происходит один цикл переключения. При установке оси 22 рычага 21 согласно фиг. 2 рабочая кромка 17 ножа 19, опуская включающую иглу 10 вниз, в соответствии с траекторией движения одновременно отклоняет ее в сторону от программоносителя и через коромысло 9 воздействует на считывающую иглу 3 и отводит ее от перфоленты 2 на небольшую величину, предотвращая ее возможное вредное воздействие на перфоленту. Для получения того же эффекта при другом взаимном положении рычага 21 и программоносителя 1-2 ось 22 рычага должна быть установлена в соответствии с фиг. 3. Предлагаемый механизм управления ремизоподъемной каретки более надежен в работе, что повышает качество вырабатываемой ткани и уменьшает количество брака.
Q7d/3.J
| Ротационная ремизоподъемная каретка для ткацкого станка | 1979 |
|
SU1009280A3 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Програмирующее устройство ремизоподъемной каретки ткацкого станка | 1973 |
|
SU582342A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
