2. Механизм по п.1,отличающийся тем, что селектор, сигналов программоносителя содержит планку, кинематически соединенную с главным валом, размещенные в корпусе и подпружиненные к программ носителю пластины, опирающиеся на аланку с наклонными зубчатыми выемк ми, выполненными на их боковых гранях, и собачки, взаимодействуншще с 0 пластинами, при зтом корпус установлен с возможностью возвратно-поступательного перемещения от привода вдоль пластин, а пластины на одном конце жестко соединены со считывающими иглами, а на другом имеют упоры для контактирования одной из пластин с толкателем,соединенным со средством сравнения,а двух других - с толкателем, соединенным с переключателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм управления ремизоподъемной каретки ткацкого станка | 1976 |
|
SU609796A1 |
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |
| РЕМИЗОПОДЪЕМНАЯ КАРЕТКА К ТКАЦКОМУ СТАНКУ | 1995 |
|
RU2090675C1 |
| Программирующее устройство к ротационной ремизоподъемной каретке ткацкого станка | 1986 |
|
SU1613510A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1984 |
|
SU1189907A1 |
| Ремизоподъемная каретка для ткацкого станка | 1975 |
|
SU973678A1 |
| Программирующее устройство к ротационной ремизоподъемной каретке ткацкого станка | 1986 |
|
SU1613511A1 |
| Механизм управления ремизоподъемной каретки ткацкого станка | 1988 |
|
SU1527338A1 |
| Ремизоподъемная каретка ткацкого станка | 1982 |
|
SU1149882A3 |
| Ротационная ремизоподъемная каретка к ткацкому станку | 1990 |
|
SU1721136A1 |
1. МЕХАНИЗМ УПРАВЛЕНИЯ РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА по авт.св. № 609796, отличающийся тем, что, с целью улучшения удобства обслуживания, он имеет дополнительную считывакнцую иглу, взаимодействующую с программоносителем, толкатели, ддин из которьк кинематически соединен с переключателем, а другой - со средством сравнения, и размещенный между иглами и - толкателями селектор, сигналов программоносителя.
Изобретение относится к текстильному машиностроению, касается конструкции ремизоподъемной каретки ткацкого станка.
По основному авт.св. К 609796 известен механизм управления ремизо подъемной каретки ткацкого станка, который содержит средство изменения положения ремизной рамки, имеющее шток, кинематически связанный с ремизной рамкой и установленный с возможностью контактирования с упором свободно смонтированного на валу переключателя, кинематически связанного со считывающей иглой, которая взаимодействует с программоносителем. Кроме того, механизм имеет дополнительную считывающую иглу, взаимодействующую с программоносителем, средство сравнения дейс твительного положения ремизной рамки с заданным, состоящее из двух установленных соосно переключателю пластин, одна из которых выполнена подпружиненной, кинематически свя зана с дополнительной считывающей иглой и главным вапом станка. Ме,ханизм управления имеет также фиксатор пластины, кинематически связанной с переключателем, при этом одна из пластин имеет вьютуп, а другая - паз для прохода выступа, а переключатель имеет второй упор для контактирования со штоком.
На вход средства сравнения подаются два сигнала: первый от программоносителя о заданном положении ре14НЗКИ в текущем цикле работы ткацкого станка, а второй сигнал о реальном положении ремизки от элемента исполнительного механизма каретки.
определяющего реальное положение ремизки в текущем цикле (например, от выходного рьтага каретки). Выход средства сравнения связан через элемент Задержки времени с переключателем. Таким образом, на один вход переключателя подается сигнал от средства сравнения о результате сравнения реального положения ремизки с заданным по программе, а на другой вход переключателя - сигнал от программоносителя об изменении состояния исполнительного механизма (о переключении) для обеспечения необходимого положения ремизки в следующем цикле работы ткацкого станка.
При совпадении в текущем цикле работы станка реального положения ремизки с заданным по программе на вход переключателя от средства сравнения поступает нулевой сигналj а это ознгмает, что сигнал на переключение, полученный переключателем от программоносителя, имеет прямой смысл, т.е. наличие отверстия соответствует наличию переключения, а отсутствие отверстия - отсутствию переключения.
При несовпадении в текущем цикле работы станка реального положения ремизки с заданным по программе на вход переключателя от средства сравнения поступает единичньш сигнал, а это означает, что счгнал на переключение, полученный переключателем от программоносителя, меняется на обратный, т.е. наличие отверстия соответствует отсутствию переключения, а отсутствие отверс- ия ,наличию переключения. Последнее
обеспечивает автоматическое регулирование соответствия реального положения ремизки заданному по программе. Кроме того, механизм управления, осуществляя контроль правильности положения ремиз в каждом цикле работы ткацкого станка, позволяет исключить пороки ткани, обусловленные разладками каретки fll .
К недостаткам известного механизг ма управления относится то, что нали чие двух функционально связанных между собой информации на программоносителе (первая о заданном положени ремиз, вторая о переключении) обуславливает трудности при изготовлении программоносителя, так как необходимы работы по программированию рисунка ткани.
Цель изобретения - улучшение условий обслуживания каретки.
Цель достигается тем, что механизм управления ремизоподъемной каретки ткацкого станка имеет дополнительную считывающзпо иглу, взаимодействующзпо с программоносителем, толкатели,один из которых кинематически соединен с переключателем, а другой - со средством сравнения, и размещенный между иглами и толкателями селектор сигналов программоносителя .
Селектор сигналов программоносителя содержит планку, кинематически соединенную с главным валом, размещенные в корпусе и подпружиненные к программоносителю пластины, опирающиеся на планку с наклонными зубчатыми выемками, выполненными на боковых гранях, и собачки, взаимодействующие с пластинами, при этом корпус установлен с возможностью возвратно-поступательного перемещения от привода вдоль пластин а пластины на одном конце жестко соединены со считьшающими иглами, а на другом имеют упоры для контактирования одной из пластин с толкателем, соединенным со средством сравнения, а двух других - с толкателем, соединенным с переключателем.
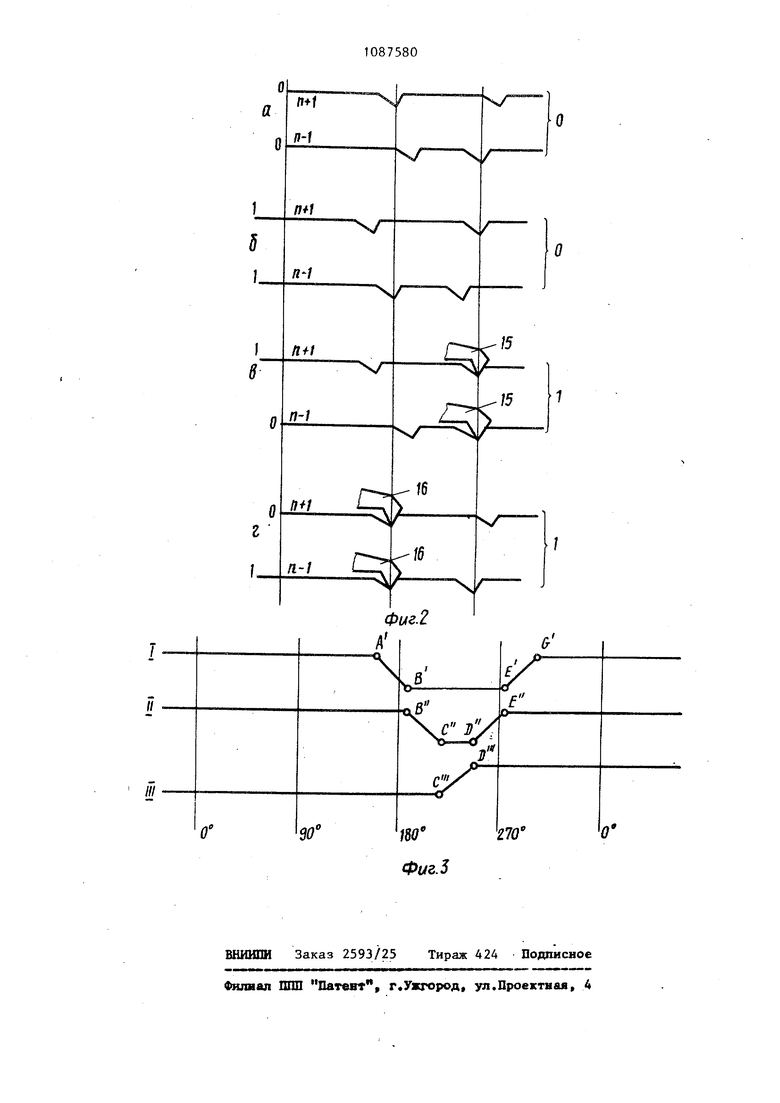
На фиг. 1 показана принципиальная схема селектора; на фиг. 2 - схема логических действий; на фиг.З цикловая диаграмма..
Механизм управления ремизоподъемной каретки ткацкого станка содержит программоноситель 1, с которым
взаимодействуют иглы 2-4. Иглы 2 и 4 смонтированы на подпружиненных пластинах 5 и 6 селектора сигналов, упоры 7 и 8 которых имеют возможность взаимодействия с толкателем 9, соединенным с переключателем. Игла 3 смонтирована на подпруiжинeннoй пластине 10, упор 11 которой соединен посредством толкателя 12 со средством сравнения.Корпус селектора сигналов выполнен из пары боковин 13 и уголков 14 и имеет возможность возвратно-поступательного перемещения от привода относи-тельно пластины 5, 6 и 10. На верхних ребрах пластин 5, 6 и 10 имеются наклонные зубчатые выемки, взаимодействующие с собачками 15 - 17, установленньми на осях 18, жестко закрепленных на боковинах 13. Расположение выемок на пластинах обусловлено выполнением логического сложения сигналов, считанных с предыдущей (п+1) и последующей (п-1) карты программоносителя 1. Под пластинами 3, 6 и 10 расположена планка 19, кинематически связанная с главным валом и перемещающаяся возвратно-поступательно по стрелке. Наличие на пластинах 5, 6 и 10 пазов 20 позволяет пластинам взаимодействовать с планкой 19.
Механизм управления работает следующим образом.
Начиная с момента времени А по цикловой диаграмме корпус селектора (фиг. 1) перемещается из крайнего правого положения в свое крайнее левое положение, при этом зафиксированные в прошлом цикле собачками 15 - 17 пластины 5, 6 и 10 движутся вместе с корпусом. Так как смены информации (перемещения программоносителя) еще не происходит, иглы 2-4 пластин, взаимодействуя с программоносителем 1, не изменяют их взаимного расположения, к моменту времени В корпус селектора с зафиксированными пластинами занимает крайнее левое положение и останавливается-. С момента времени В планка 19 (фиг. 1) начинает свое движение из крайнего левого поло.ения в крайнее правое. Вместе с планкой 19 начинают двигаться те пластины, иглы ко:торых находятся в отверстиях программоносителя 1, пластины, иглы которых упираются в пленку программоно сителя, образуют зазор с планкой
19 и остаются при этом неподвижными. В конце своего хода планка 19 вытягивает все иглы 2-4 из отверстий программоносителя, выбирает все зазоры между теми пластинами, иглы которых упираются в пленку программоносителя, и пройдя еще 1 мм останавливается к моменту времени С. После этого времени иглы 2-4 всех :сгластин 5, 6 и 10 отводятся от программоносителя .1 на величину функцинального зазора. При движении планки 19 в период времени пластины 6 и 5 при движении слева направо своими скосами воздействуют соот ветственно на собачки 15 и 16, поднимая их в верхнее положение. Подъем собачки 17 осуществляется специальным устройством (не показано) . Таким образом, осуществляется расфиксирование пластин или Сброс предыдущей информации к моменту времени СЧ
В период времени CD происходит перемещение программоносителя на одну строчку (на одну карту).
Начиная с момента времени Ir , планка 19 начинает движение из правого положения в левое. При этом начинают движение и пластины, прижатые к планке 19 пружинами.
После выбора функционального зазора пластины, иглы которых упираются в пленку программоносителя,прекращают свое движение, а пластины, иглы которых входят в отверстие программоносителя, продолжают движение вместе с планкой 19 и к моменту времени Е останавливаются в крайнем левом положении. Таким образом, к моменту времени Е все пластины рассортированы согласно информации программоносителя. При этом пластины 6 и 5, занявшие положения, соответствующие разноименным сигналам, фиксируются собачками 15 и 16 (фиг. 2), а те, которые занимают положения, соответствующие однименным сигналам, не фиксируются собачками 15 и 16 (фиг. 2).
Пластины 10, иглы 3 которых считьшают информацию о заданном поло- жении ремиз в текущем цикле, фиксируются общей для всех секций каретки собачкой 17.
В период времени EG корпус селектора движется слева направо вместе с зафиксированными пластинами 6, 10 и 5, которые взаимодействуют с переключателем и средством сравнения .
Использование предлагаемого изобретения позволит наносить на прграммоносителе информацию только о положении ремиз без специального программирования, что позволит сократить время изготовления картона, при перестройке станков на новый ассортимент, при этом набив картона (программоносителя) может быть вьшолнен менее квалифицированным персоналом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
