Изобретение относится к устройствам автоматизации режимов работы дви гателей, в частности к системам дистанционного у;-:равления двигателями и может быть использовано при автоматизации нереверсивных двигателей оборудованных реверс-редукторными пе редачами и установленных на транспортных средствах, например, на судах. Известны системы дистанционного управления дригателями с реверс-редукторной передачей l . Данные системы дистанционного управления при реверсе судна обеспечивают с помощью всережимного регулятора частоты вращения снижение скорости вращения двигателя до опреде-ленной величины, принятой для реверсирования, запуска и работы на холостом ходу данного типа двигателей упор реверсирования (УР), отключение реверс-редукторной передачи на холостой ход и последующее переключе ние передачи в положение обратного вращения гребного винта. Однако данным системам дистанционного управления свойственны серье ные недостатки, заключающиеся в том что при маневре судна, например реверее, наблюдается большой провгш частоты вращения двигателя (при переключении передачи в положение (обратного вращения гребного винта), который, -при недостаточном быстродействии всережимного регулятора может привести к остановке двигателя ,и срыву заданного маневра и, кроме того, вызывает дополнительные динамические нагрузки на детали движения двигателя и повышенный износ деталей реверсредукторной передачи. Наиболее близ., им к предлагаемому является электрсгидравлическое устройство дистанциск-ю-автоматического управления оборотамз-s и реверсированием дизеля, содержащее датчик режима работы двигателя, один выход которого через блок управления частотой вращения подключен ко- входам первого и второго электрогидравлических преобразователей, установленные на реверс-редукторной передаче двигателя, концевые выключатели, соединенные с соответствующими входами блока управления переключением реверс-редукторной передачи, выходы которой через третий и -четвертый электрогидравлические преобразователи, подключены ко входу блока сервомеханизмов.
кинематически соединенному с реверсредукторной передачей двигателя f2j.
Недостатками данного устройств управления являются повышенные нагруз ни на двигатель и детали реверс-редукторной передачи в процессе реверса судна, что отрицательно сказывается на их моторесурсе и надежности, и возможный, в пределе, срув заданного маневра вследствие эаглохания двигателя.
Недостатки объясняются тем, что всережимные регуляторы частоты враения двигателей обеспечивают регуирование либо только по принципу тклонения, либо по принципу отклонения в сочетании с принципом регуирования по возмущению и в установившемся режиме движения транспортного средства обеспечивают достаточно качественное протекание переходных процессов САРС. Однако при выполнении маневра, например, при страгивании судна с места или при реверсе (т.е. при резком набросе нагру;1ки) всережимные регуляторы, даже двух-импульсные, не обеспечивают требуемых динамических характеристик вигателя с передачей.
Это объясняется рядом факторов, свойственных самому принципу построения рет уляторов, важнейшими из которых является чистое запаздывание регулирующего сигнала в двигателе, ограниченное {в силу трения и инерции движущихся частей) быстродействие исполнительного элемента регулятора, и др., причем эти отрицательные черты свойственны как обычным, так и двухимпульсным всережимным регулятора.м.
Улучшение динамических характеристик двигателя с реверс-редукторной передачей при набросе детерминированной нагрузки (а именно таким видом нагрузки и является нагрузка при страгивании транспортного средства с места или при реверсе) возможно за счет введения в регулятор корректирующего импульса не в момент изменения нагрузки (например при включении реверс-редукторной передачи) , как в двухимпульсном регуляторе, а раньше, так как этот корректирующий импульс вырабатывается не измерителем нагрузки, а в момент подачи команды на включение нагрузки-.
Цель изобретения - повышение надежности устройства, при одновременном снижении нагрузок на двигатель и реверс-редукторную передачу и улуч шении качества переходных процессов.
Поставленная цель достигается тем, что устройство содержит гидрозамок, пятый, шестой и седьмой электрогидравлические преобразователи и формирователь управляющих сигналов, первый и второй входы которого соединены с. соответствующими выходами
блока управления частотой вращения, третий вход - с выходом блока управления переключением реверс-редукторной передачи, а четвертый вход - с другим выходом датчика режима работы двигателя, причем первый, второй и третий выходы формирователя управляющих сигналов подключены соответственно к первому, второму и третьему входам блока управления частотой вращения и одним входом пятого, шестого и седьмого электрогидравлических преобразователей, другие входы которых через гидрозамок соединены с выходами первого и второго электрогидравлических преобразователей, а гидравлические выходы - с входом блока сервомеханизмов.
А также тем, что формирователь управляющих сигналов выполнен в виде последовательно соединенных запоминающего элемента, элемента И и широтно-импульсного модулятора, входы которого соединены соответственно с первым и третьим входами формирователя четвертый и второй входы которого подключены соответственно к входу запоминающего элемента и одному входу элемента И , вь1ход которого соединен с выходом широтно-импульсного модулятора и вторым выходом формирователя, первый выход которого соединен с другим входом элемента И, а третийВЫХОД - с выходом запоминающего элемента.
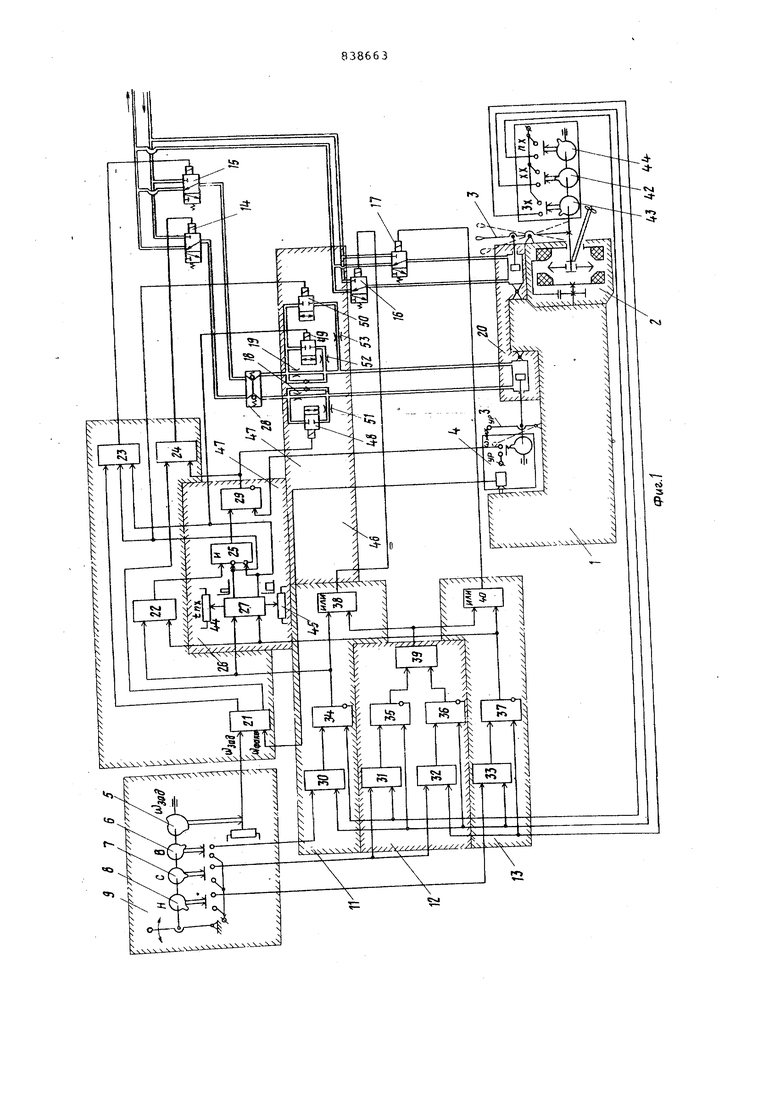
На фиг. 1 представлена структурная схема устройства; на фиг. 2 график работы устройства.
Двигатель 1 с реверс-редукторной передачей 2 содержит местный пост управления 3 и датчик 4 режима работы двигателя. Дистанционное управление осуществляется командным органом 5 управления частотой вращения двигателя и переключателями реверс-редукторной передачи 6-8 дистанционного поста 9, подключенными при помощи блока 10 управления частотой вращения и блока переключения реверсредукторной передачи на узлах 11-13 и электрогидравлических преобразователей 14-17 и гидравлических дросселей 18 и 19 к блоку 20 сервомеханизмов, кинематически связанному с местным постом 3. Блок 10 управления частотой вращения двигателя содержит блок 21 сравнения и логические элементы ИЛИ 22-24, причем входы логического элемента ИЛИ 22 связаны с блоками управления переключением передачи на передний 11 и задний 13 ход, а выход - со входом логического элемента И 25 формирователя управляющих импульсов 26, входьг логического элемента ИЛИ 23 связаны с блоком 21 сравнения (по цепи увеличения частоты вращения двигателя) и с выходами широтно-импульсного модулятора 27, формирователя 26, а
выход - с электрогидравлическим преобразователем 15, обеспечивающим с помощью гидрозамка 28 и дросселя 19 воздействие на блок 20 сервомеханизмов в сторону увеличения частоты вращения двигателя, входы логического элемента ИЛИ 24 связаны с блоком 21 сравнения (по цепи уменьшения частоты вращения двигателя) и с выходом запоминающего элемента 29 формирователя 26, а выход - с электрогидравлическим преобразователем 14, обеспечивающим с помощью гидрозамка 28 и дросселя 18 воздействие на блок 20 сервомеханизмов в сторону уменьшения частоты вращения двигателя. Блоки управления переключением передачи 11-13 содержат соответсвенно каждый пару из последовательно связанных логического элемента И 30-33, и блоков памяти 34-37, число которых равно числу режимов переключения передачи, и логические элементы ИЛИ 38-40, Входы блоков управления переключением передачи 11-13 связаны с командными органами 6-8 дистанционного поста 9 и с концевыми выключателями 41-43 фиксированных положений ренерсредукторной передачи 2.
Выходы блоков управления переключением передачи 11-13 связаны с электрогидравлическими преобразователя 16 и 17, причем выходы блоков 11 и 13 кроме того подключены ко входу широтно-импульсного модулятора 27 формирователя управляющих сигналов 26. Ширина импульса модулятора 27 задается величиной элементов уставки 44 и 45, определяющих длительность управляющего сигнала соответственно при включении переднего и заднегохода.
Формирователь 26 управляющих сигнн лов и блок 46 изменения коэффициента усиления входят в состав релейногокорректирующего устройства 47.
Блок 46 изменения коэффициента усиления содержит электрогидравлические преобразователи 48-50 и последовательно установленные гидравлические дроссели 51-53.
Электрогидравлический преобразователь 48 включен в цепь воздействия на блок 20 сервомеханизмов в сторону уменьшения частоты вращения двигателя 1, и связан с выходом запоминающего устройства 29, а преобразователи 49 и 50 - в цепь воздействия на блок 20 сервомеханизмов в сторону увеличения частоты.вращения двигателя 1 и связан с выходами широтно-импульсного модулятора 27.
Гидравлический дроссель 51 служит для изменения скорости перемещения сервомеханизма при уменьшении частоты вращения двигателя после прохождеиия управляющего сигнала от релейного корректирующего устройства 47, а дроссели 52 и 53 - для изменения
скорости перемещения сервомеханизма при увеличении частоты рв и-сник дви-гателя во время действия управляющего сигнала от релейного корректирующего устройства 47, причем в зависимости от полученной команды дистанционного поста 9 (переключение реверс-редукторной передачи 2 на передний или задний ход), воздействие на сервомеханизм осуществляется через дроссель 52 (например для переключения пере0дачи на задний ход) или через дроссель 53 (например для переключения, передачи на передний ход).
Коэффициенты расхода дросселей 51-53 устанавливаются с учетом опти5мизации характеристик переходного процесса выхода двигателя на установившийся режим после осуществления маневра (например реверса судна) .
0
Система дистанционного управления работает следующим образом.
Управление изменением частоты вращения двигателя 1 осущес вляется блоком 10 путем сравнения сигналов заданного скоростного режима от ко5мандного органа-5 дистанционного поста9 и фактического режима от датчика режима работы двигателя 4 воздействием с помощью электрогидравлических преобразователей 14 и 15
0 через гидрозамок 28 и гидравлические дроссели 18 и 19 на блок 20 сервомеханизмов .
Управление переключением реверсредукторной Г1ередачи 2 на передний,
5 холостой и задний ход осуществляется соответственно блоками 11-13 путем сравнения сигналов задания от командных органов 6-8 дистанционного посте 9 и фактического положения передачи
0 от концевых выключателей 41-43 путем воздействия с помощью электрогидравлических преобразователей 16 и 17 на блок 20 сервомеханизмов.
Для уяснения принципа работы системы достаточно рассмотреть процесс
5 управления переключением передачи на задний ход блоком 13.
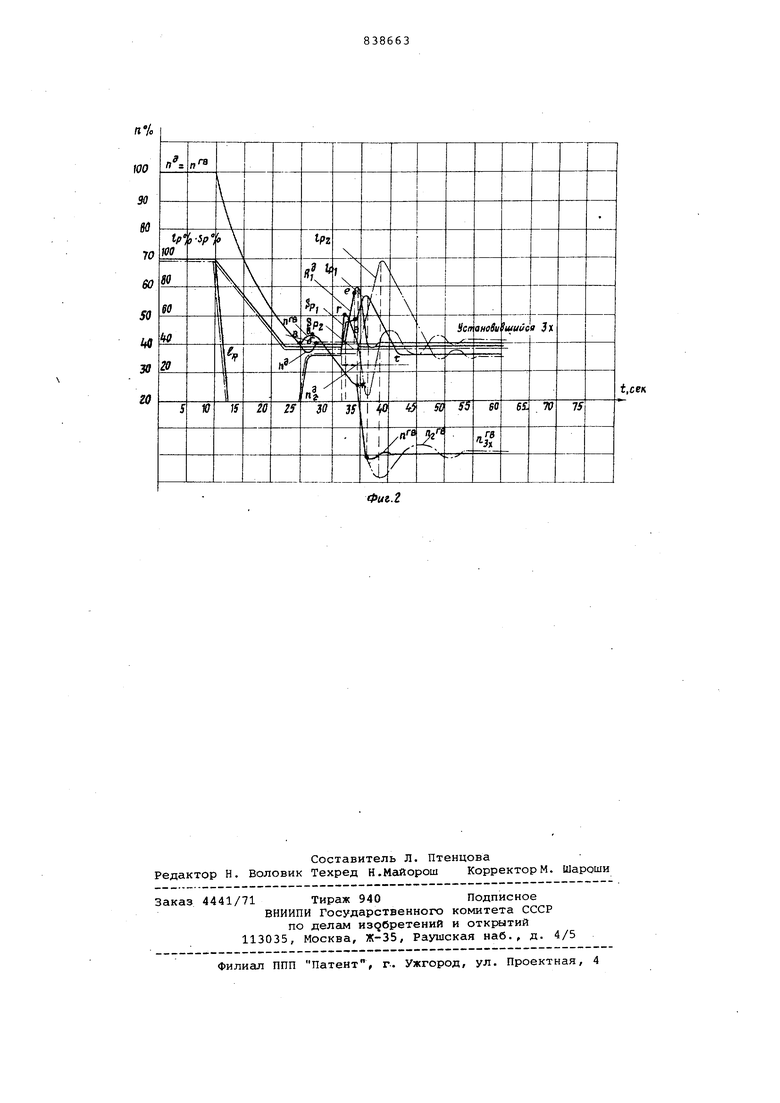
На фиг. 2 представлены характер изменения частоты вращения двигателя Пд и гребного iHTa , а также
0 положение органа адания всережимного регулятора S
рейки топливных
насосов р во времени при реверсировании с полного переднего хода (сплошные линии).
Штрих-пунктирныг-ш линиями обозначены изменения тех же величин при управлении двигателем с реверс-редукторной передачей.
При реверсировании,например с полного переднего хода командный орган 5 переводится в положение, соответствующее принятой для реверсирования частоте вращения. Управляющий сигнал от блока 21 сравнения через логический элемент ИЛИ 24 поступает на электрогидравлический преобразователь 14, который заставляет блок 20 сервомеханизмов перемещать орган задания всережимного регулятора местно.го поста 3 в положение упо ра реверсирования УР, Прц перемещении органа задания всережимного регулятора в положение упора реверсирогания гребной винт перейдет на .работу в турбинном режи ме, следуя близко к винтовой харак,теристике V const 1. Так как ча тота вращения гребного винта в тур бинном режиме выше частоты врс1щения двигателя при работе УР, то веере жимный регулятор выведет рейку топливных насосов двигателя на упор ну БОЙ подачи, и подача топлива в двигатель полностью прекратится. Двигатель будет, вращаться гребным винтом, работающим в турбинном режиме и развивающим мощность, необходимую для преодоления суммы механических потерь в двигателе и валовинтовой группе судна. Гребной винт, работая в турбинном режиме, создает значительное до полнительное сопротивление, способству10 пее торможению судна, поэтому реверс-редукторную передачу выгодно переключить в положение холостого хода только тогда, когда частота вращения гребного винта упадет до величины, соответствующей частоте вращения двигателя при его работе на УР (точка а). По достижении гребным винтом и двигателем частоты вращения, принятой для реверсирования, по сигналу от командного органа 7 реверс-редук торная передача 2 с помощью логичес кого элемента И 31, блока 35 памя ти, логических элементов ИЛИ 38-4 и электрогидравлических преобразова телей 16 и 17 переключается в полож ние холостого хода, в результате че двигатель и движитель (гребной винт разобщаются. После отключения гребного винта о двигателя всережимный регулятор восстановит подачу топлива в двигатель и он начнет работать на холостом ходу (точка б). Мощность, развиваемая гребным винтом в турбинном режиме, упадет до величины, определяемой механическими потерями только одной валовинтовой группы, и поэтому частота вра щения гребного винта после отключени двигателя несколько повысится (точка в) , С уменьшением частоты вращения гребного винта до заданной величины или по прошествии определенного промежутка времени по сигналу от команд ного органа 8 реверс-редукторная передача 2 с помощью логического элемента И 33, блока 37 памяти, логического элемента ИЛИ 40 и электрогидравлического преобразователя 17 переключается в положение заднего хода. Одновременно с выхода запоминающего устройства 37 управляющий сигнал поступает на входы логического элемента ИЛИ 22 и широтноимпульсного модулятора 27 формирователя управляющих сигналов 26. С выхода модулятора 27 командный импульс, ширина которого определяется величиной элемента уставки 45, поступает на электрогидравлический преобразователь 15 через логический элемент ИЛИ 23, и на дополнительно установленный преобразователь 49, Рабочая жидкость электрогидравлической системы от источника питания через преобразователь 15, гидрозамок 23, преобразователь 49 и гидравлический дроссель 52 поступает в блок 20 сервомеханизмов. Под действием блока 20 сервомеханизмов уставка в.сережчмного регулятора скачком увеличиваетя до положения, определяемого длительностью Корректирующего импульса модулятора 27 и коэффициентом расхода гидравлического дросселя 52 (точка г), что влечет за собой выход рейки топливных насосов в положение увеличенной подачи (точка д) и рост частоты вращения до значения, определяемого положением рейки топливных насосов при работе двигателя на холостом ходу (точка е). При переключении реверс-редукторной передачи на задний ход тормозная лента барабана заднего хода передачи за .короткий промежуток времени тормозит гребной вал и обеспечивает синхронизацию частоты вращения двигателя и гребного винта, вращающегося в направлении, противоположном вращению двигателя. С момента начала затяжки тормозной ленты (точка ж) частота вращения двигателя резко падает, до момента окончания проскальзывания барабана заднего хода (точка з ). Однако, учитывая предварительное кратковременное повышение момента двигателя от газовых сил за счет опеpeжciющeй установки всережимного регулятора в положение повышенной подачи топлива (точка г), величина падания частоты вращения двигателя не превышает величины ее предварительного увеличения при поступлении от модулятора 27 опережающего импульса, что практически исключает переходный процесс выхода двигателя и гребного винта на установившийся режим заднего хода. Опережающее действие корректирующего импульса на время т дЬстигается за счет одновременности подачи команды на переключение реверс-редукторной передачи в положение заднего хода и на увеличение частоты вращения двигателя, причем это времл, большее времени действия корректирующего импульса, равно времени перемещения механизма переключения реверс-редукторной передачи из положения холостого хода до полохсения заднего хода (до момента начала затяжки тормозной ленты барабана заднего хода). После окончания действия кор ректирующего импульса сигнал с выход логического элемента И 25 через запоминающий элемент 29 поступает на электрогидравлический преобразователь 48 и параллельно через логический элемент ИЛИ 24 на электрогидравлический преобразователь 14, Рабочая жидкость электрогидравлической системы от источника питани через преобразователь 14, гидрозамок 28, преобразователь 48 и гидравл ческий дроссель 51 поступает в блок 20 сервомеханизмов, под действием ко .торого уставка всережимного регулято ра частоты вращения двигателя вновь переводится в положение, соответствующее работе двигателя на упоре реверсирования. Процесс управления переключением реверс-редукторной передачи на перед ний ход по блоку 11 происходит аналогично описанному выше. Анализ работы данной системы дистанционного управления двигателем с реверс-редукторной передачей, а также сопоставление характера изменения параметров пе :5еходного процесса выхода на установившийся режим при реверсировании показывает, что при управлении с помощью предлагаемой системы повышается надежность выполнения транспортным средством, например, судном заданного маневра за счет предварительного кратковременного повышения момента двигателя от газовых сил, повышается надежность и увеличивается моторесурс дви гателя и реверс-редукторной передачи за счет снижения динамических нагрузок из-за меньших по величине колебаний частоты вращения двигателя, уменьшается выбег судна и время осуществления заданного маневра, оптими зируется хар.актер протекания рабочего процесса в двигателе при выпол- нении маневра, а также обеспечивается практически полная ликвидация переходного процесса (при условии выбора оптимальных величины и длительности подачи корректирующего импульса) при наиболее тяжелом случае работы САРС двигателя {скачкообразны наброс нагрузки). Формула изобретения Устройство для дистанционного управления двигателем с реверс-редукторной передачей, содержащее датчик режима работы двигателя,- один выход которого через блок управления частотой вращения подклпчен ко входам первого и второго электрогидравлических преобразователей, установленные на реверс-редукторнсй передаче д)зигателя, концевые выклкочатели,. соединенные с соответствующими входами блока управлегчия переключением реверсредукторной передачи, выхо.ды коэ:о рого через третий i: четвертый электрогидравлические преобразователи подключены ко входу блока сервомеханизмов, кинематически соединенному с реверс-редукторной передачей двкгателя , отличающееся те i, что, с целью поБЫЦекия надежности ,устройство содержит гидрозамок, пятый, шестой и седьмой электрогидравлические преобразователи и формирователь управляющих сигналов, первый и второй входы которого соединены с соответствующими выходами блока управления частотОй вращения, третий входс выходом блока управлен.;к переключением реверс-редукторной передачи ,а четвертый вход - о другим выходом датчика режима работы двигателя, причем первый, второй и третий выходы формирователя управляющих сигналов подключены соответственно к первому .второму и третьему входам блока управления частотой вращения и входом пятого,- шестого и седьмого электрогидравлических преобразователей , другие входы которых через гидрозамок со.динены с выходами первого и второго электрогидравлических преобразователей , а выходы - с входом блока сервомеханизмов. 2. Устройство,по П.1, о т л и чающееся тем, что формирователь управляющих сигналов выполнен в виде последовательно соединенных запоминающего элемента, элемента И и широтно-импульсного модулятора,. входы которого соединены соответственно с первым и третьим входами формирователя, четвертый и второй входы которого подключены соответственно к входу запоминающего элемента и одному входу элемента И, выход которого со -jiHeH с выходом к-иротно-импульсног-. „;одулятора и вторым выходом форм;,, ователя, первый выход которого соединен.с другим входом элемента И, а третий выход с выходом запоминающего элемента. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 199560, кл. F 02 О 1/12, 1967. 2.Авторское свидетельство СССР № 245490, кл, f 02 О 1/12, 1970 (ПРОТОТИП).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU878993A2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU883539A2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1978 |
|
SU740969A1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1980 |
|
SU960457A2 |
| Система дистанционного и автоматического управления двигателем внутреннего сгорания | 1982 |
|
SU1059237A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ПЕРЕДАЧЕЙ | 2003 |
|
RU2262609C2 |
| Дистанционный привод управления главным судовым двигателем /варианты/ | 1983 |
|
SU1191357A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1975 |
|
SU699218A1 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |