Изобретейие относится к автоматическому регулированию двигателей внутреннего сгорания.
Известны систетмы дистанционного и автоматического управления двигателем внутреннего сгорания, содержащие .задатчик с логическим блоком управления, связанным при помощи двух каналов с преобразователем, подключенным к сервомеханизму реверса и к сервомеханизму органа управления частотой вращения, соединенного при помощи датчика положения с логическим блоком, снабженным двумя парами последовательно установленных логических элементов И и ИЛИ, включенных соответственно в каналы связи логического блока и преобразователя и связанных с датчиком положения, выполненным в виде кулачкового устройства и взаимодействующего с Ним переключателя 1.
Систетиы обеспечивают устойчивую работу судовых двигателей внутреннего сгорания в широком диапазоне рабочих режимов, но при реверсировании их надежность является Недостаточной.
Цель изобретения - повышение эксплуатационной надежности двигателя при реверсировании-.
Для достижения поставленной цели система снабжена дополнительным датчиком положения, формирователем сигналов реверса и блоком электрргидравлических клапанов с управляющими электромагнитами и выходными усилителями, причем дополнительный датчик положения выполнен с микропереключателями, формирователь сигналов реверса выполнен в виде двух групп элементов И и элементов памяти, при этом группы элементов И последовательно соединены между собой и с элементами памяти, входы сброса KOTOpbix подключены к микропереключателям дополнительного датчика положения, а выходы - к выходным усилителям, подсоединенным к управляющим элек тррмагнитам, и блок электрргидравлических преобразователей выполнен в виде двух электррмагнитных кранов: четырехходового и двухходового, соединенных между собой через обратные клапаны и при помощи параллельных линий управления с элементами И, элементом ИЛЙ-НЕ и инверторрм НЕ - с сервомеханизмом реверса, при этом к входам элементов И линии управления четырехходового электррмагнитного крана подсоединен инвертор НЕ, вход которрго подключен к выходу элемента И линии управления двухходового электррмагнитного крана, а к входу элемента И линии управления двухходового крана подсоединены при помощи элемента ИЛИ-НЕ выходы элементов И линий управления четырехходового электррмагнитного крайа.
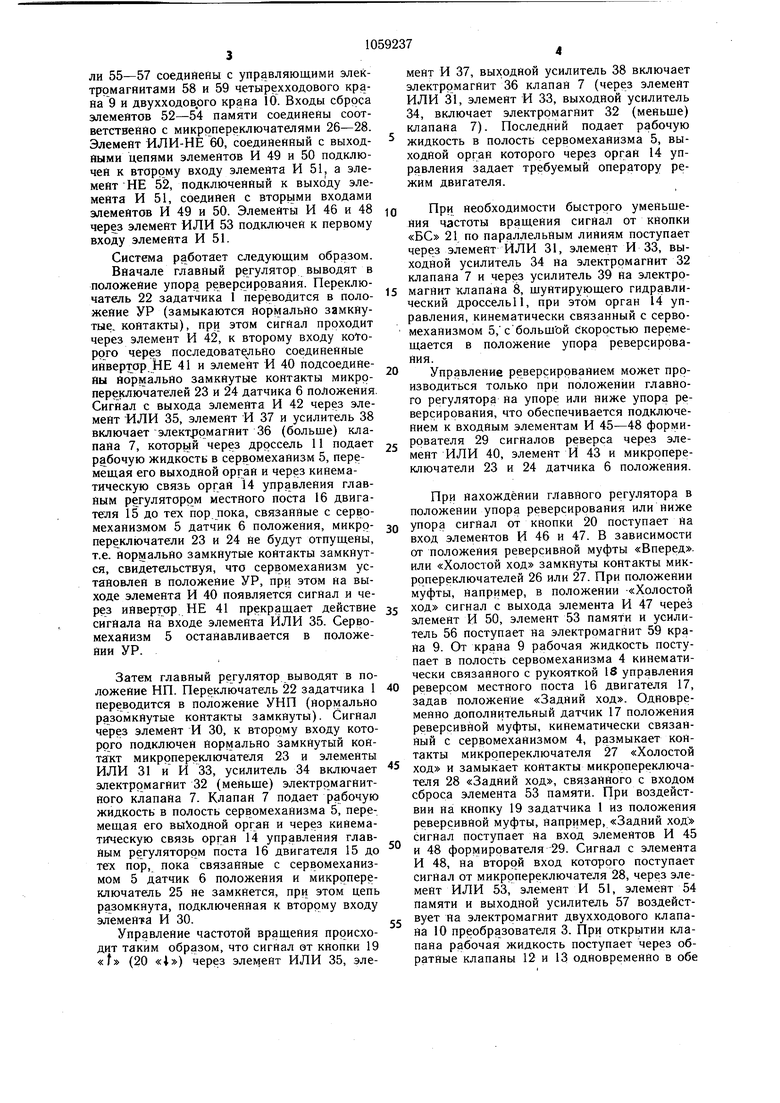
. На фиг. 1 приведена структурная схема систетйы; на фиг. 2 - функциональная схема системы.
Система содержит задатчик 1 с логическим блоком 2 управления, связанным при помощи двух каналов с преобразователем 3, подключенным к сервомеханизму 4 реверса и к сервомеханизму 5 управления частотой вращения, соединенного при помощи датчика 6 положения с логическим блоком 2. К логическому блоку 2 подключены электрргидравлические клапаны 7 и 8 управления режимами.
Преобразователь 3 выполнен в виде блока электрргидравлических преобразователей содержащего два электррмагнитных крайа: чetыpexxoдoвoй 9 и двухходовой 10. Параллельно электрргидравлическому клапану 8 подключен гидравлический дррссель 11. Двухходовой кран 10 подключен к гидравлической линии, соединяющей кран 9 с сервомеханизмом 4 реверса через два обратных клапана 12 и 13. Сервомеханизм 5 соединен с органом 14 управления главным регуляторрм двигателя 15, расположенном на местном посту 16. Дополнительный датчик 17 положения реверсивной муфты подключен к рукоятке 18 управления реверсивной, муфты местного поста 1б.
Задатчик 1 содержит кнопки управления «t (больше) 19 (фиг. 2), «4 (меньше) 20, «БС (быстрьш сбррс) 21 и переключатель 22 УНП - УР (упор нулевой подачи - упор реверсирования).
Датчик б положения содержит микррпереключатели 23 и 24 (фиг. 2), фиксирующие положение упора реверсиррвания, и 25, фиксирующий положение упора нулевой подачи УНП - УР. Дополнительный датчик 17 положениия содержит микррпереключатели 26-28, фиксирующие положение реверсивной муфты «Вперед, «Холостой ход, «Назад соответственно.
Логический блок 2 содержит формиррватель 29 сигналов реверса, входной элемент И 30, соединенный с переключателем 22 и микррпереключателем 25 датчика 6, элемент ИЛИ 31 управляющего электррмагнита 32 (меньше) клапана 7, соединенный через элемент И 33 с выходным усилителем 34, логический элемент ИЛИ 35, управляющего электррмагнита 36 (больше) клапана 7, соединенный через элемент И 37 с выходным усилителем 38. Выходной усилитель 39 связан с электрогидравлическим двухходовым клапаном 8 быстрого сброса. Фиксация поло жения УР обеспечивается нормально замкнутыми контактами микррпереключателей 23 и 24, подсоединенными к элементу И 40, выход которрго подключен через инвертор НЕ 41 к элементу И 42 и к элементам ИлИ 43 и 44, подключенным к вторым входам элементов И 37 и 33 и элементам И 45-48, соединенными с кнопками 19 и 20, при этом микррпереключатели 26-28 датчика 17 соединены с входами элементов И 46, 45 и 48. Элементы И 49-51 соединены с входами соответствующих элементов 52-54 памяти, выходы KOTOpbix через выходные усилители 55-57 соединены с управляющими электромагнитами 58 и 59 четырехходового крана 9 и двухходового крана 10. Входы сброса элементов 52-54 памяти соединены соответственно с микропереключателями 26-28. Элемент ИЛИ-НЕ 60, соединенный с выходными цепями элементов И 49 и 50 подключен к второму входу элемента И 51, а элемент НЕ 52, подключенный к выходу элемента И 51, соединен с вторыми входами элементов И 49 и 50. Элементы И 46 и 48 элемент ИЛИ 53 подключен к первому входу элемента И 51.
Система работает следующим образом.
Вначале главный регулятор выводят в положение упора реверсирования. Переключатель 22 задатчика 1 переводится в положение УР (замыкаются нормально замкнутые, контакты), при этом сигнал проходит через элемент И 42, к второму входу которого через последовательно соединенные инвертор НЕ 41 и элемент И 40 подсоединены нормально замкнутые контакты микропереключателей 23 и 24 датчика 6 положения Сигнал с выхода элемента И 42 через элемент МЛИ 35, элемент И 37 и усилитель 38 включает электромагнит 36 (больше) клапана 7, который через дроссель 11 подает рабочую жидкость в сервомеханизм 5, перемещая его выходной орган и через кинематическую связь орган 14 управления главным регулятором местного поста 16 двигателя 15 до тех пор пока, связанные с сервомеханизмом 5 датчик 6 положения, микррпереключатели 23 и 24 не будут отпущены, т.е. нормально замкнутые контакты замкнутся, свидетельствуя, что сервомеханизм установлен в положение УР, при этом на выходе элемента И 40 появляется сигнал и через инвертор НЕ 41 прекращает действие сигнала на входе элемента ИЛИ 35. Сервомеханизм 5 останавливается в положении УР.
Затем главный регулятор выводят в положение НП. Переключатель 22 задатчика 1 переводится в положение УНП (нормально разомкнутые контакты замкнуты). Сигнал через элемент И 30, к второму входу которого подключен нормально замкнутый контакт микропереключателя 23 и элементы ИЛИ 31 и И 33, усилитель 34 включает электромагнит 32 (меньще) электромагнитного клапана 7. Клапан 7 подает рабочую жидкость в полость сервомеханизма 5, перемещая его вы5содной орган и через кинематическую связь орган 14 управления главным регулятором поста 16 двигателя 15 до те пор, пока связанные с сервомеханизмом 5 датчик 6 положения и микропереключатель 25 не замкнется, при этом цепь разомкнута, подключенная к второму входу элемента И 30.
Управление частотой вращения происходит таким образом, что сигнал от кнопки 19 «f (20 «i) через элемент ИЛИ 35, элемент И 37, выходной усилитель 38 включает электромагнит 36 клапан 7 (через элемент ИЛИ 31, элемент И 33, выходной усилитель 34, включает электромагнит 32 (меньше) клапана 7). Последний подает рабочую жидкость в полость сервомеханизма 5, выходной орган которого через орган 14 управления задает требуемый оператору режим двигателя.
При необходимости быстрого уменьшения частоты вращения сигнал от кнопки «БС 21 по параллельным линиям поступает через элемент ИЛИ 31, элемент И 33, выходной усилитель 34 на электромагнит 32 клапана 7 и через усилитель 39 на электромагнит клапана 8, шунтирующего гидравлический дроссель 1, при этом орган 14 управления, кинематически связанный с сервомеханизмом 5,сбольшЪй Скоростью перемещается в положение упора реверсирования.
Управление реверсированием может производиться только при положении главного регулятора на упоре или ниже упора реверсирования, что обеспечивается подключением к входным элементам И 45-48 формирователя 29 сигналов реверса через элемент ИЛИ 40, элемент И 43 и микропереключатели 23 и 24 датчика 6 положения.
При нахождении главного регулятора в положении упора реверсирования или ниже упора сигнал от кнопки 20 поступает на вход элементов И 46 и 47. В зависимости аг положения реверсивной муфты «Вперед, или «Холостой ход замкнуты контакты микропереключателей 26 или 27. При положении муфты, например, в положении -«Холостой ход сигнал с выхода элемента И 47 через элемент И 50, элемент 53 памяти и усилитель 56 поступает на электромагнит 59 крана 9. От крана 9 рабочая жидкость поступает в полость сервомеханизма 4 кинематически связанного с рукояткой 18 управления реверсом местного поста 16 двигателя 17, задав положение «Задний ход. Одновременно дополнительный датчик 17 положения реверсивной муфты, кинематически связанный с сервомеханизмом 4, размыкает контакты микропереключателя 27 «Холостой ход и замыкает контакты микропереключателя 28 «Задний ход, связанного с входом сброса элемента 53 памяти. При воздействии на кнопку 19 задатчика 1 из положения реверсивной муфты, например, «Задний ход сигнал поступает на вход элементов И 45 и 48 формирователя 29. Сигнал с элемента И 48, на второй вход которого поступает сигнал от микропереключателя 28, через элемент ИЛИ 53, элемент И 51, элемент 54 памяти и выходной усилитель 57 воздействует на электромагнит двухходового клапана 10 преобразователя 3. При открытии клапана рабочая жидкость поступает через обратные клапаны 12 и 13 одновременно в обе
полости серромехайизма 4, приводя его рабочий орган в среднее положение «Холостой ход. Рабочий орган поворачивает кинематически с ним связанные рукоятку 18 управления реверсивной муфтой местного поста 16 и дополнительный датчик 17 положения в положение «Холостой ход, вследствие чего контакты микропереключателя 28 «Задний ход разомкнутся и замкнутся контакты микропереключателя 27, сигнал с которого поступает на вход сброса элемента 57 памяти. Flpii необходимости управления включением реверсивной муфты в положение «(Вперед система работает аналогично описанному.
Использование системы позволяет выполнение команды «Холостой ход производить при работе одного двухходового электрргидравлического клапана, что исключает возможность создания аварийной ситуации при отказе одного из двух электромагнитов двухходовых кранов при исполнении команды «Холостой ход. В этом случае отказ может привести не толко к аварийной ситуации двигателя. Но и к аварии судна. (Вместо включения муфты в положение «Холостой ход может произойти переключение реверсивной муфты из положения «Вперед в положение «Назад или из положения «Назад в положение «Вперед).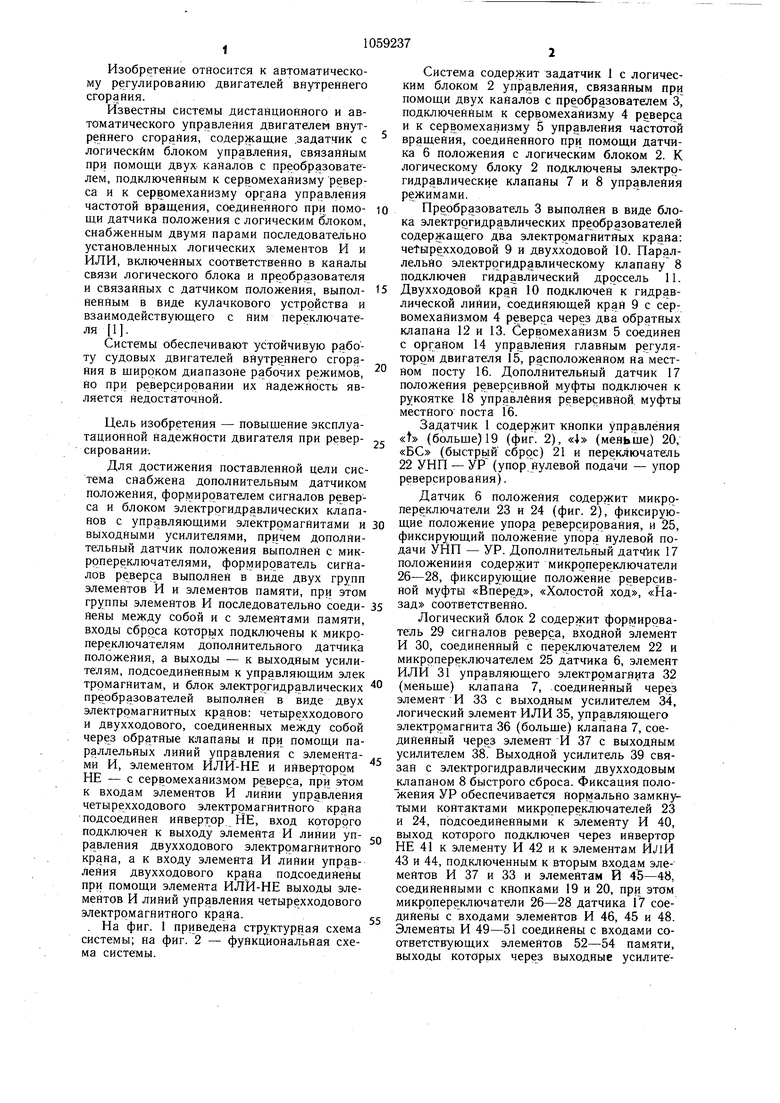

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая и дистанционная система для управления судовым двигателем внутреннего сгорания | 1982 |
|
SU1078116A1 |
| Автоматическая система управления силовой установкой | 1983 |
|
SU1149044A1 |
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| Автоматическая дистанционная система управления судовым дизелем | 1983 |
|
SU1125396A1 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| Система дистанционного управления судовым двигателем | 1978 |
|
SU735815A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ПЕРЕДАЧЕЙ | 2003 |
|
RU2262609C2 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1975 |
|
SU580338A1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1978 |
|
SU740969A1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1979 |
|
SU878993A2 |
СИСТЕМА ДИСТАНЦИОННОГО И АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ, содержащая задатчик с логическим блоком управления, связанным при помощи двух каналов с преобразователем, подключенным к сервомеханизму реверса и к сервомеханизму управления частотой вращения, соединенного при помощи датчика положения с логическим блоком, снабженным двумя парами .последовательно установленных логических элементов И и ИЛИ, включенных соответственно в каналь связи логического блока и преобразователя и связанных с датчиком положения, выполненным в виде кулачкового устройства и взаимодействующего с ним переключателя, отличающаяся тем, что, с целью повышения эксплуатационной надежности двигателя при реверсировании, система снабжена дополнительным датчиком положения, формирователем сигналов реверса и блоком электрргидравлических преобразователей с управляющими электррмагнитами и выходными усилителями, причем дополнительный датчик положения выполнен с микропереключателями, формиррватель сигналов реверса выполнен в виде двух групп элементов И и элементов памяти, при этом группы элементов И последовательно соединены между собой и с элементами памяти, входы сброса KOTOpbix подключены к микропереключателям дополнительного датчика положения, а выходы - к выходным усилителям, подсоединенным к управляющим электромагнитам, и блок электрогидравлических преобразователей выполнен в виде двух электромагнитных кранов: четырехходового и двухходового, соединенных между собой через обратные.клапаны и при помощи параллельных линий управления с элементами И, элементом ИЛИ-НЕ и инвертором НЕ - с сервомеханизмом реверса, при этом к входам элементов И линии управления четырехходового электромагнитного крана подсоединен инвертор НЕ, вход которого подключен к выходу элемента И линии управления двухходового электррмагнитного крана, а к входу элемента И линии управления двухходового крана подсоединены при помощи элемента ИЛИ-НЕ выходы элементов И линий управления четырехходового электррмагнитного крана. 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1975 |
|
SU580338A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
