Изобретение относится к технике измерения океанографических элемент и может быть использовано в экспеди ционных исследованиях для изг ерения пространственно-временных распределений гвдрологических, гидрохимических и других элементов морской воды на хрду судна. Цель изобретения - расширение диапазона пространственно-временных частот измерения элементов и сокращение времени измерения на океанологических разрезах. При буксировке свободного (без углубителя) тяжелого кабель-троса (троса) достигаются условия, когда подъемная сила., возникающая при обтекании троса, компенсирует силу тяжести троса, и он принимает вид прямой, идущей под определенным углом к горизонту. При изменении скорости буксировки трос остается прямолинейным, а угол наклона изменяется. Это позволяет сделать заклю чение, что при условиях предлагаемого способа скорость вертикального пере мещения опускающегося по тросу гидр зонда стремится к постоянной величине и не зависит от скорости судна Последовательное опускание парти гвдрозондов по тросу, буксируемому за судном, позволяет сократить врем измерения вертикальных распределени на разрезах и уменьшить расстояния между профилями, а также полностью исключить возможность потери гидрозондов. Таким образом, расширяется диапазон измерения пространственновременных частот элементов в сторон высоких частот. Так как измерения профилей на разрезе выполняются на полном ходу судна, то при одном и том же времен вьоделенном на проведение разреза, разрез, выполненный по предлагаемом способу, может охватить значительно ,большие расстояния, что увеличивает ряды измерений. Таким образом, расширяется диапазон измерения пространственно-временных частот в сторо ну низких частот. Для того, чтобы обеспечить вертикальное перемещение гидрозондов (т.е. горизонтальная составляющая скорости их перемещения по тросу была соизмерима со скорост.ьюдвижени судна), можно, например, обеспечить максимальное лобовое сопротивление гидрозонда в горизонтальной плоскости. Это условие нетрудно выполнить при конструировании гидрозонда. Совокупность достигаемых результатов при измерениях предлагаемым способом: возможность измерений при крейсерской скорости научно-исследовательских судов; последовательное получение вертикальных профилей на разрезе с любой дискретностью; возможность получения качественно, новых пространственно-временных характеристик исследуемого разреза (т,е. одновременное получение данных по измерению многих элементов исследуемой водной среды и получение качественно новой картины исследуемых полей ). Это позволяет сделать вывод, что предлагаемый способ обеспечивает расширение диапазона пространственно-временных частот измерения элементов морской воды на океанологических разрезах. На чертеже схематично изображен один из возможных вариантов выполнения устройств для реализации предлагаемого способа. Устройство содержит установленные на палубе судна океанографическую лебедку 1, кассету 2 с гвдрозондами 3., блок 4 управления в лаборатории. На лебедке намотан кабель-трос (трос ) 5, имеющий на заглубляемом коренном конце ограничитель 6, Устройство 4 управления предназначено для вырабатьшания сигналов управления электромагнитами, расположенными в кассете 2, и быть выполнено, например, на цифровых микросхемах 155 серии в зависимости от желания оператора вьщавать определенный код управления с определенной дискретностью. Кассета 2 служит для хранения гидрозондов 2, включения их и подачи по кабель-тросу 5.. Она может быть вьшолнена в виде отдельной стойки, расположенной на корме судна. Через кассету 2 .по направляющим роликам проходит кабель-трос 5, на KOTqpoM последовательно расположены гидрозонды 3 со своими направляюЕ ими роликами. В кассете размещены электромагниты, которые срабатьгоают в зависимости от кода, приходящего от блока 4 управления. Электромагниты ,
Управляют механическими защелками, церживающими гидрозонды в кассете.
Гидрозонд 3 служит первичным преобразователем гидрофизических, гидрохимических элементов морской воды и представляет собой, например, гидрозонд типа Исток с автономным источником питания. Гидрозонд механически и электрически связан с индуктором, через который передаетс информация с гидрозонда. Кроме того гидрозонд тормозное устройств выполненное в виде лопастного винта ось которого направлена по ходу ;а;вижения судна. Во время погружения гидрозонда лопастной винт не вращается, что создает дополнительное сопротивление для набегающего поток воды, и гидрозонд фактически не движется в горизонтальной-плоскости. На оси лопастного винта расположен генератор, служащий для подзарядкиаккзтауляторов, размещенных в гидрозонде..
Информация с гидрозонда может передаваться индуктивным или акустическим способами либо записьшаться на встроенный внутри гидрозовда регистратор (магнитофон и т.д.).
Если информация передается по кабель-тросу, то в качестве его может быть использован кабель-трос марки КТБ-6, рассчитанный на разрывное усилие 6т.
Способ осуществляют следующим образом.
Опускают с движущегося судна кабель-трос (трос) отрицательной плавучести, имеющий ограничитель на конце.
Включают питание в гидрозондах.
Последовательно опускают по кабель-тросу (тросу)партию пвдрозондов один за другим. Число гидрозондов в партии и периодичность их запуска определяют предварительно в зависимости от требуемой дискретности измерений. Горизонтальная составляющая скорости их перемещения по кабель-тросу (тросу) соизмерима со скоростью движения судна.
Регистрируют информацию, поступающую с каждого движущегося по кабель-тросу (тросу) гидрозонда.
Когда вся партия гидрозондов достигает конца кабель-троса, поднимают партию гидрозондов совместно с кабель-тросом (тросом) на борт
судна. .
Затем всю цоследовательность операций повторяют. Научно-исследовательское судно
типа,например, Академик Вернадский движется на исследовательском полигне со скоростью 15 узлов. Опускают за борт судна кабель-трос 5. При указанной-скорости движения судна, использовании кабель-троса КТБ-6 длиной 3600 м, имеющего на свободном конце ограничитель 6, произойдет заглубление свободного конца на глубину около 240 м.
Включают блок 4 управления. С блока 4 управления на кассету 2 поступает команда в виде закодированных электрических импульсов. Частота команд зависит от требуемой дискретности измерений профилей и задается в блоке 4 управления. При .поступлении команды на кассету 2 она включает один гидрозонд Гнапример, с помощью геркона, установленного внутри гидpoзoвдa и отпускают защелку, которая удерживает гидрозонд 3. Под действием своего веса гидрозонд 3 скользит по наклонному кабелю 5 к поверхност воды, где увлекается набегающим потком воды. Поскольку лопастной винт гидрозонда застопорен и не вращает ся, скорость гидрозонда в горизонтальной плоскости относительно воды стремится к нулю..
С заданной дискретностью кассета 2 вьшустит по кабель-тросу всю партию гидрозондов, находящихся в кассете. С каждого гидрозонда инфор мация в виде электрического сигнала через индуктор по кабель-тросу подается в бортовое устройство комплекса, где регистрируется .в аналоговом и цифровом виде.
Достигая концевого ограничителя 6, гидрозонды автоматически отключаются (например, с помощью геркона, срабатьшает защелка, стопорящая лопастной винт, он начинает вращаться, при этом лобовое сопротивление гидрозонда уменьшается. Одновременно начинает вращаться генератор, подзаряжающий аккумуляторы. Когда все гидрозонды партии достигнут конца кабель-трооа, его поднимают на борт судна с помощью лебедки 1, и цикл операций повторяется.
Использование предлагаемого способа измерения профилей элементов морской воды на ходу судна позволит сократить время измерений не менее чем в 3 раза.
Кроме того, предлагаемый способ позволяет расширить диапазон пространственно-временных частот измерений злемёнтов на океанологических разрезах как в сторону высоких.
так и в сторону низких частот, а это влечет за собой расширение функциональных возможностей предлагаемого способа, которое выражается в том, что становится возможным одновременное измерение нескольких элементов исследуемой среды, например кислорода, температуры, электропроводимости, глубины и т.д. посредством использования соответствующих гидрозондов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство сбрасывания свободнопадающего гидрозонда разового действия | 1986 |
|
SU1525646A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК | 2014 |
|
RU2556289C1 |
| ТЕРМОЗОНД ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ВОДЫ | 2012 |
|
RU2513635C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156958C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2559338C1 |
| ЗОНДИРУЮЩИЙ КОМПЛЕКС | 2023 |
|
RU2828192C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИХ ПАРАМЕТРОВ НА БОЛЬШИХ ГЛУБИНАХ | 2014 |
|
RU2571292C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ВЕРТИКАЛЬНОГО ТЕМПЕРАТУРНОГО РАЗРЕЗА В ВОДНОЙ СРЕДЕ | 2023 |
|
RU2822208C1 |
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
СПОСОБ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНЫХ РАСПРЕДЕЛЕНИЙ ЭЛЕМЕНТОВ МОРСКОЙ ВОДЫ НА ОКЕАНОЛОГИЧЕСКИХ РАЗРЕЗАХ с борта судна, заключающийся в том, что измеряют алименты морской воды при свободном падении гидрозонда . по кабель-тросу или тросу с ограни-i чителем на конце, отличающийся тем, что, с целью расширения диапазона пространственновременных частот измерения элементов и сокращения времени измерений, измерения осуществляют, буксируя свободный кабель-трос или трос отрицательной плавучести и последовательно опуская по нему гидрозон3 ды, при этом скорость движения судна с учетом плавучести кабельтроса или троса выбирают из условш; скольжения по нему гидрозондов с горизонтальной составляющей скорости, соизмеримой со скоростью движения судна. со со ел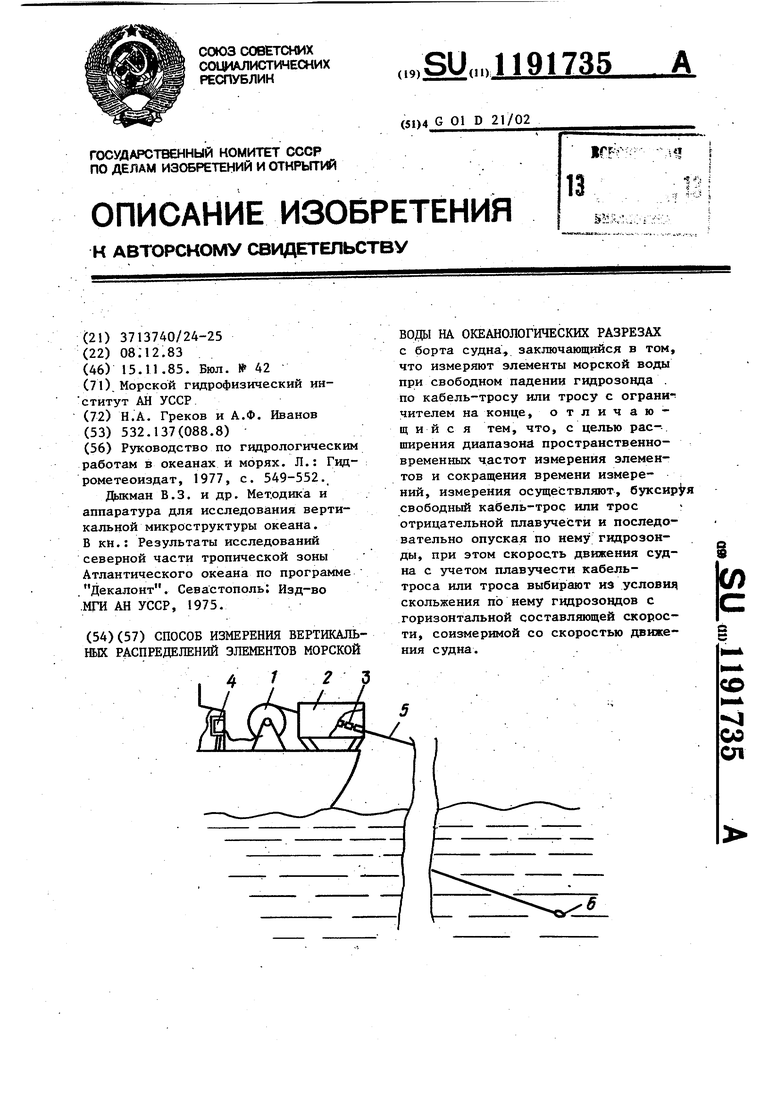
| Руководство по гидрологическим работам в океанах и морях | |||
| Л.: Гидрометеоиздат, 1977, с | |||
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СНЕГООЧИСТИТЕЛЬ ДЛЯ ЖЕЛЕЗНЫХ ДОРОГ | 1922 |
|
SU549A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| и др | |||
| Методика и аппаратура для исследования вертикальной микроструктуры океана | |||
| В кн.: Результаты исследований северной части тропической зоны Атлантического океана по программе .Декалонт | |||
| Севастополь; Изд-во .МГИ АН УССР, 1975. | |||
