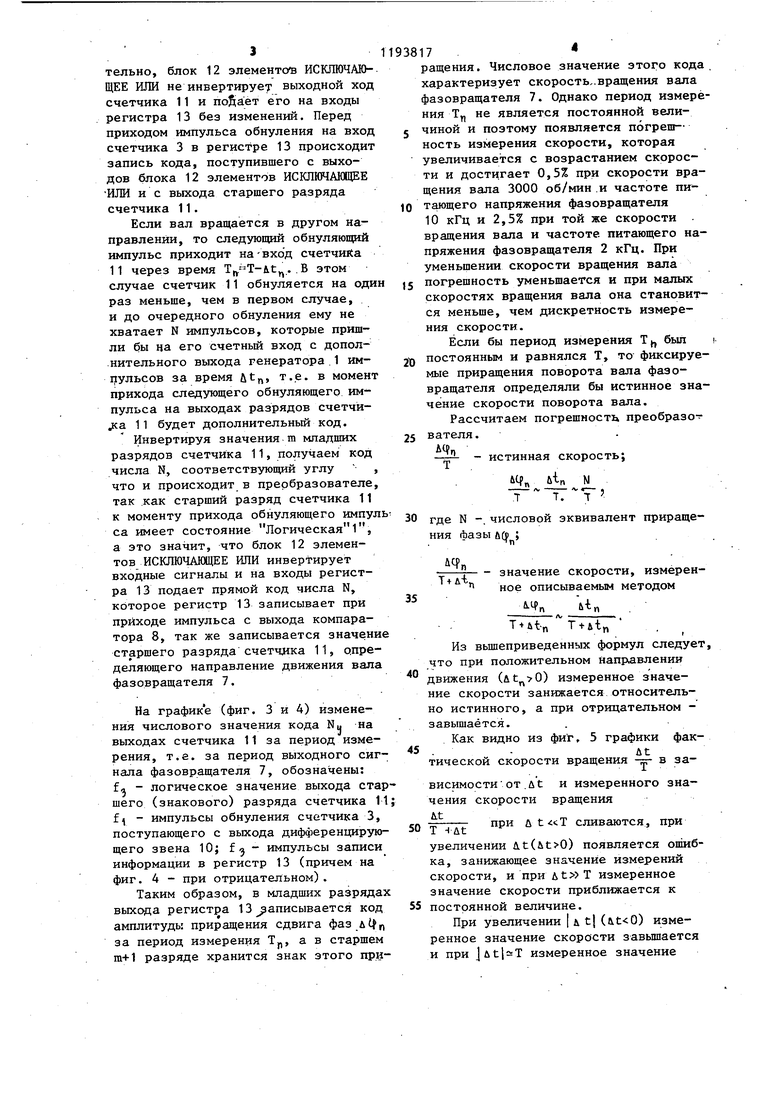
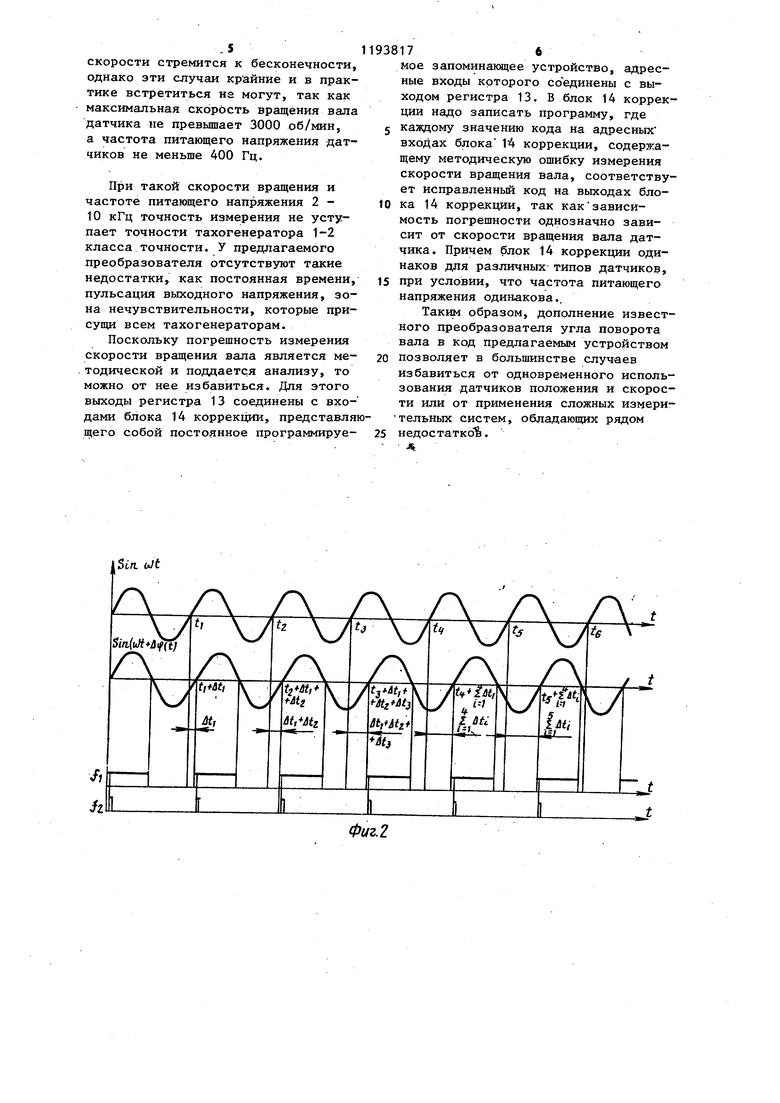
« Изобретение относится к автомати ке и вычислительной технике и может быть использовано для связи аналоги ных источников информации с цифровы вычислительным устройством. Цель изобретения - расширение функциональных возможностей преобра зователя. На фиг. 1 приведена функциональ.ная схема преобразователя угла пово рота вала, в код; на фиг. 2 - диагра ма поясняющая его работу; на фиг. 3 и 4 - процесс формирования кода ско рости; на фиг. 5 - графики фактичес кой и измеренной скоростей вращения вала фазовращателя. Преобразователя угла поворота ва ла в код содержит генератор импульсов, выполненный в виде задающего генератора 1 и делителя 2 частоты, счетчик 3 импульсов, регистр Д, дешифратор 5, интегратор 6, фазовращатель 7, компаратор 8, элемент 9 з держки, дифференцирующую цепь 10, счетчик 11 импульсов, блок 12 элеме тов ИСКЛЮЧАКЛЦЕЕ ИЛИ, регистр 13 и блок 14 коррекции. Преобразователь угла поворота вала в код работает следующим образом. Задающий генератор .1 импульсов вырабатьшает импульсы с частотой f и длительностью ьц. Делитель 2 частоты делит эту частоту на коэффициент К и подает на вход счетчика 3 импульсы с частотой f/k. Импульсы с выходов счетчика 3 поступают на вход дешифратора 5, выходы которого соединены с входс1ми интегратора 6, с выхода которого поступает питающее напряжение на входы фазовращателя 7. При положительном напряжении на выходе фазовращателя 7 компа ратор 8 вырабатывает сигнал Логиче кая, а при отрицательном - сигнал Логический О. При поступлении на управляющий вход регистра 4 положительного фронта сигнала с выхода компаратора 8 на выходе регистра 4 устанавливается код, соответствующий углу поворота вала фазо вращателя 7. Измерение скорости поворота вала основано на отклонении частоты выходного сигнала фазовращателя 7 от частоты питающего его напряжения Пусть вал фазовращателя 7 вращае ся в сторону увеличения сдвига фа17Zзы ( между питающим и выходным напряжением фазовращателя 7, и в момент времени t сдвиг фаз ф (tc)0. Период питающего напряжения фазовращателя 7 постоянен и равен Т.В момент времени , появляется импульс с выхода компаратора 8 (фиг. 2, f). Промежуток времени At, определяет изменение сдвига фаз Atp за период изменения выходного сигнала фазовращателя 6, который равен Т, Т + Л t,. В общем случае период выходного напряжения фазовращателя 7 равен Т Т .-fut. где & t - приращение времени, обусловленное изменением фазы выходного напряжения фазовращателя 7. При вращении вала в другую сторону величина ut меняет знак и, следовательно, меняет знак приращения сдвига фаэ . Двоичный код, соответствующий приращению сдвига фаз Д cf за период измерения Т,, , определяет скорость поворота вала, в пре- образователе это осуществляется следующим образом. Элемент 9 задержки задерживает на время импульс с выхода компаратора 8. Дифференци-, рующая цепь 10 формирует короткий импульс по положительному фронту импульса на выходе элемента 9 задержки и подает его на вход обнуления счетчика 11. Если скорость вращения вала равна нулю, то частота выходного сигнала фазовращателя 7 равна частоте питающего напряжения, т.е. Т,, значит, обнуляющие импульсы на входе счетчика 11 проходят через время Тик моменту прихода следующего обнуляющего импульса счетчика 11 имеют состояние Логический 0. Если вал вращается в положительную сторону, то. следующий обнуляющий мпульс приходит через время Т, T+utf,. За время Т счетчик 11 обнуляется определе.нное число раз, а за. ремя itj он сосчитьшает N импульсов с дополнительного выхода генератора 1 импульсов, что соответствует глу в цифровых единицах. Старший M-1 разряд счетчика 11 находится в состоянии Логический 0, следова3 тельно, блок 12 элементе/в ИСКЛЮЧАЮЩЕЕ ИЛИ не инвертирует выходной ход счетчика 11 и пойает его на входы регистра 13 без изменений. Перед приходом импульса обнуления на вход счетчика 3 в регистре 13 происходит запись кода, поступившего с выходов блока 12 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ и с выхода старшего разряда счетчика 11. Если вал вращается в другом направлении, то следующий обнуляющий импульс приходит на - вход счетчийа 11 через время T -T-it. .В этом случае счетчик 11 обнуляется на оди раз меньше, чем в первом случае, и до очередного обнуления ему не хватает N импульсов, которые пришли бы на его счетный вход с допол.нительного выхода генератора 1 импульсов за время ut, т.е. в момент прихода следующего обнуляющего импульса на выходах разрядов счетчи са 11 будет дополнительный код. Инвертируя значения m младших разрядов счетчика 11, получаем код числа N, соответствующий углу , что и происходит в преобразователе, так .как старший разряд счетчика 11 к моменту прихода обнуляющего импул са имеет состояние Логическая, а это значит, что блок 12 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ инвертирует входные сигналы и на входы регистра 13 подает прямой код числа N, которое регистр 13 записывает при приходе импульса с выхода компаратора 8, так же записывается значени старшего разряда счетчлка 11, определяющего направление движения вала фазовращателя 7. На графике (фиг. 3 и 4) изменения числового значения кода N на выходах счетчика 11 за период измерения, т.е. за период выходного сигнала фазовращателя 7, обозначены: f - логическое значение выхода стар шего (знакового) разряда счетчика 1 f1 - импульсы обнуления счетчика 3, поступающего с выхода дифференцирующего звена 10; fз импульсы записи информации в регистр 13 (причем на фиг. 4 - при отрицательном). Таким образом, в младших разрядах выхода регистра 13 записывается код амплитуды приращения сдвига фаз д(|п за период измерения Tj,, а в старшем т+1 разряде хранится знак этого при17ращения. Числовое значение этого кода, характеризует скорость,.вращения вала фазовращателя 7. Однако период измерения Т не является постоянной величиной и поэтому появляется погрешность измерения скорости, которая увеличивается с возрастанием скорости и достигает 0,5% при скорости вращения вала 3000 об/мин.и частоте питающего напряжения фазовращателя 10 кГц и 2,5% при той же скорости вращения вала и частоте питающего напряжения фазовращателя 2 кГц. При уменьшении скорости вращения вала погрешность уменьшаегся и при малых скоростях вращения вала она становится меньше, чем дискретность измерения скорости. Если бы период измерения Т был i постоянным и равнялся Т, то фиксируемые приращения поворота вала фазовращателя определяли бы истинное значение скорости поворота вала. Рассчитаем погрешность преобразователя. - - истинная скорость; N .Т Т. Т где N -. числовой эквивалент приращения фазы игр ; п - значение скорости, измеренное описываемым методом а„ Tvut-n Из вьш1еприведенных формул следует, что при положительном напрлвлении движения () измеренное значение скорости занижается относительно истинного, а при отрицательном завышается. Как видно из фиг, 5 графики фактическои скорости вращения в зависимости от. At и измеренного значения скорости вращения u.t . при ut-itT сливаются, при увеличении &t() появляется опшбка, занижающее значение измерений скорости, и при At Т измеренное значение скорости приближается к постоянной величине. При увеличении | д t() измеренное значение скорости завышается и при измеренное значение
скорости стремится к бесконечности, однако эти случаи крайние и в практике встретиться на могут, так как максимальная скорость вращения вала датчика не превьшает 3000 об/мин, а частота питающего напряжения датчиков не меньше 400 Гц.
При такой скорости вращения и частоте питающего напряжения 2 10 кГц точность измерения не уступает точности тахогенератора 1-2 класса точности. У предлагаемого преобразователя отсутствуют такие недостатки, как постоянная времени, пульсация выходного напряжения, зона нечувствительности, которые присущи всем тахогенераторам.
Поскольку погрешность измерения скорости вращения вала является методической и поддается анализу, то можно от нее избавиться. Для этого выходы регистра 13 соединены с входами блока 14 коррекции, представлящего собой постоянное программируемое запоминакицее устройство, адресные входы которого соединены с выходом регистра 13, В блок 14 коррекции надо записать программу, где каждому значению кода на адресных входах блока14 коррекции, содержащему методическую ошибку измерения скорости вращения вала, соответствует исправленный код на выходах блока 14 коррекции, так какзависимость погрешности однозначно зависит от скорости вращения вала датчика. Причем блок 14 коррекции одинаков для различных типов датчиков, при условии, что частота питающего напряжения одинакова..
Таким образом, дополнение известного преобразователя угла поворота вала в код предлагаемым устройством позволяет в большинстве случаев избавиться от одновременного использования датчиков положения и скорости или от применения сложных измерительных систем, обладающих рядом недостатко1. - Л 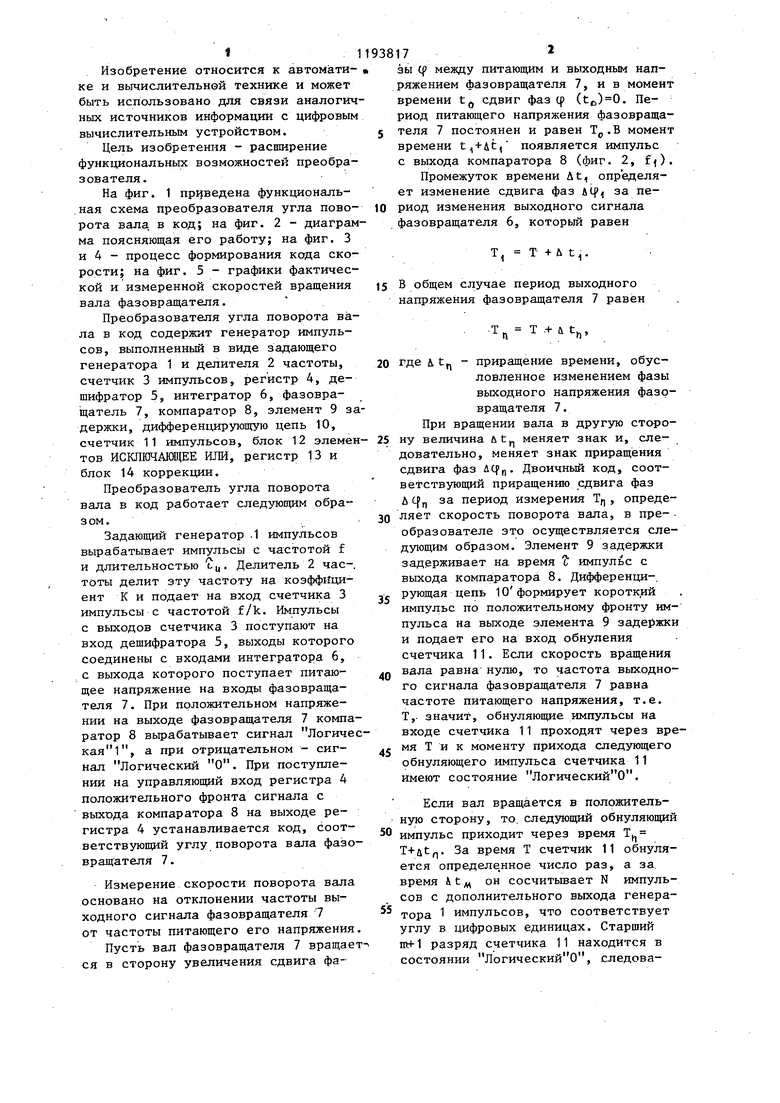
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1215177A2 |
| Преобразователь угла поворота вала в код | 1989 |
|
SU1633492A1 |
| Преобразователь угол-код | 1974 |
|
SU490150A1 |
| Датчик углового положения и скорости вращения вала | 1985 |
|
SU1278718A1 |
| Преобразователь угол-дискретное приращение фазы | 1977 |
|
SU710057A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1522408A1 |
| Датчик углового положения и скорости вращения вала | 1980 |
|
SU934382A1 |
| Преобразователь угла поворота вала в код | 1991 |
|
SU1833966A1 |
ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД по авт. св. № 902039, отличающийся тем, что, с целью расширения функциональных возможностей, в него введены элемент задержки, дифференцирующая цепь, дополнительньй счетчик импульсов, блок элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, дополн тельный регистр и блок коррекции, дополнительный выход генератора 1 4пульсов соединен со счетным входом дополнительного счетчика, выход старшего разряда которого соединен с первой группой входов блока элементов ИСКЛЮЧАЮЩЕЕ РШИ и со старшим разрядом дополнительного регистра, а остальные выкоды соединены с второй группой входов блока элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, выходы которого соединены с остальными разрядами дополнительного регистра, выходы которого соединены с входами блока коррекции, выходы которого являются дополнительными выходами преобразователя, а выход компаратора соединен элемент задержки и дифференцирующую (О цепь с .входом установки нуля дополнительного счетчика импульсов. -
Sin (Jt
due.}
Фиг-Ч
&t ТШ
At
-так
| Преобразователь угла поворота вала в код | 1980 |
|
SU902039A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
