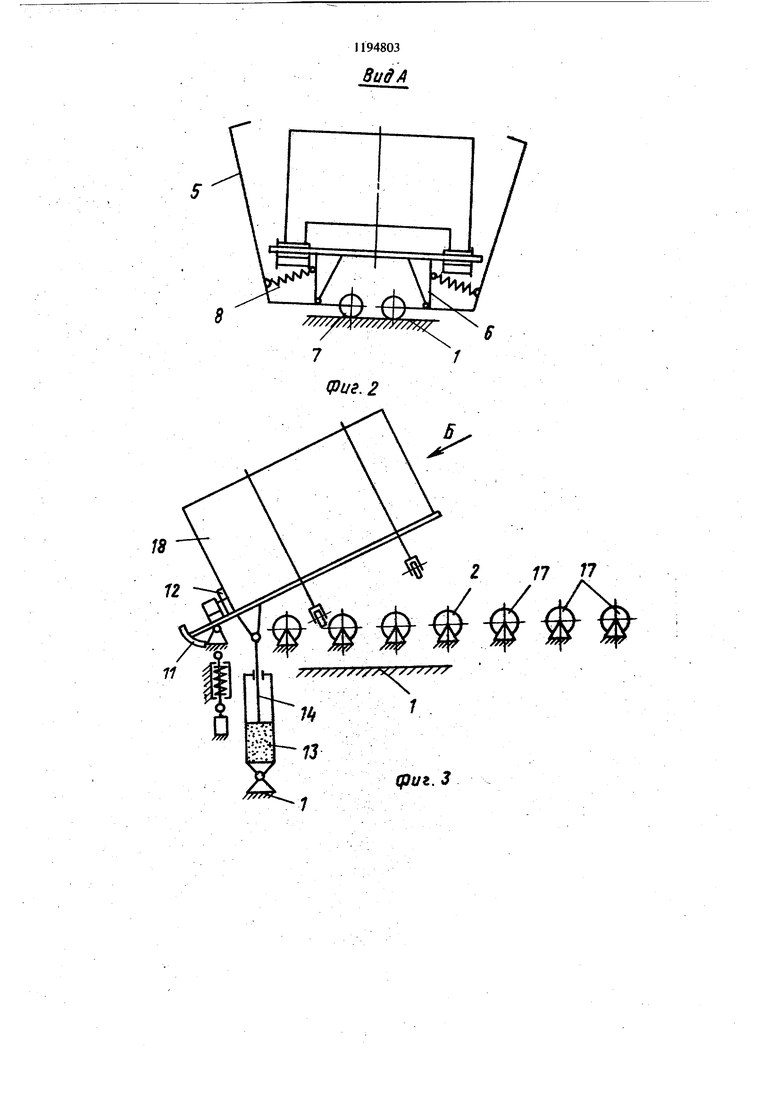
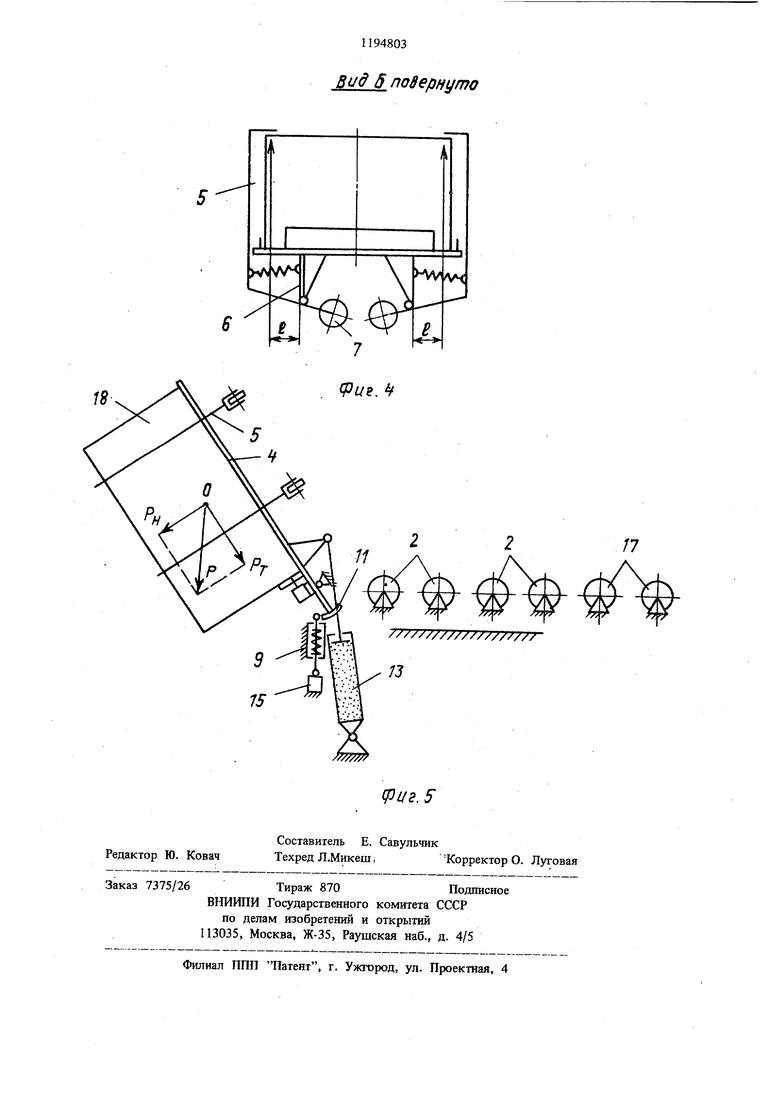
1 Изобретение относится к погрузочно-разгру зочиым работам, в частности для разгрузки контейнеров. Цель изобретения - обеспечение автоматической фиксации Контейнера., На фиг. 1 изображен контователь для кон тейнеров, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - начальный цикл поворота кантователя; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 кантователь в моме окончания кантования. На -основании 1, содержащем приводные катки 2, шарнирно смонтирована на оси 3 поворотная платформа 4 с поворотными захв тами 5, шарнирно закрепленными на kpoHштейндх 6 платформы 4. На нижних частях захватов 5 имеются ролики 7. Захваты 5 прижимаются к кронштейнам, 6 платформы пружинами 8, На основании 1 смонтирован подпружиненный упор 9 с толкателем 10. Новоротная платформа 4 выполнена с консольной изогну той частью И и упором 12. Силовой цилинд 13 шарнирно прикреплен к основанию 1, а его шток 14 - к поворотной платформе 4 На основа1ши 1 установлен конечный вык лючатель 15, а на платформе 4 - конечный выключатель 16. С приводного рольганга 17 поступает на кантовку для выгрузки грузов контейнер 18... Кантователь работает следующим образом. В исходном положении платформа 4 установлена горизонтально ролики 7 упираются основание 1, в результате чего захваты 5 разведены, пружины 8 растянуты. Приводные катки 2 вращаются в сторону конечного выключателя 15 (на кантователь). Контейнер 18 вкатывается приводными катками 2 с рольганга 17 на платформу 4 до упора 12, при этом срабатывает конечный выключатель 16, который выключает привод катков 2 и включает силовой цилиндр 13. Начинается поворот платформы 4 с контейнером 18, пр чем в начале поворота ролики 7 захватов 5 отрываются от основания 1, а пружины 8 сводят поворотные захвать 5, которые фикс руют положение контейнера 18 на поворотной платформе 4. Как только платформа 4 с контейнером 18 пройдет вертикальное положение, контейн 3 18 будет иметь тенденцию к отрыву от платформы 4, а платформа 4, в свою очередь, будет стремиться быстро завалиться и в результате за малый ход штока 14 может происходить относительно большой поворот платформы 4, что приведет к резкому останову платформы и большим динамическим нагрузкам на конструкцию кантователя. Отрыву контейнера 18 от платформы 4 будет препятствовать упор 12 платформы 4, а также верхние части захвата 5, в которые упрется крыша контейнера 18. Наличие зксцентриситета е между точкой приложения нагрузки и осью поворота (фиг. 4 и 5) создает условия самозапирания поворотных захватов 5, т. е. контейнер составляющей своего веса будет эти рычаги сводить, а не разводить. Резкому останову платформы будет препятствовать сопротивление подпружиненного упора 9, толкатель 10 которого взаимодействует с консольной изогнутой частью 11 платформы. Профиль ее выбран таким образом, что при увеличении угла кантования реакция противодействия со стороны подпружиненного упора 9 на изогнутую часть II платформы, а следовательно, и на платформу 4 будет увеличиваться. В результате этого платформа 4 после прохождения вертикального положения будет медленно поворачиваться. Полный поворот платформы 4 с контейнером 18 происходит на угол не более 12б711ри зтом содержимое контейнера вь1Гружается, а хвостовик толкателя 10 нажимает на конечный выключатель 15, по команде которого вьшолняется реверсирование хода цилиндра 13 и включение привода катков 2 в сторону от канйэвателя. В конце опускания платформы 4 с контейнером 18 ролики 7 упираются в основание 1, в результате чего захваты 5 разводятся и освобождают контейнер 18, который ложится на приводные катки 2 и выкатывается из кантователя. При этом освобождается конечный выключатель 16, который через реле времени (ни показано) реверсирует катки 2 в сторону движения следующего контейнера на кантователь.
1194803
ВидА
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь для контейнеров | 1991 |
|
SU1785975A1 |
| Кантователь штучных грузов | 1985 |
|
SU1339070A1 |
| Кантователь для контейнеров | 1987 |
|
SU1511198A1 |
| Крановый захват-кантователь | 1986 |
|
SU1386536A1 |
| Кантователь для контейнеров | 1982 |
|
SU1047804A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Поточная линия для сборки и сварки крупногабаритных изделий | 1986 |
|
SU1400840A1 |
| Кантователь длинномерных изделий | 1987 |
|
SU1465389A1 |
| Кантователь | 1983 |
|
SU1154175A1 |
| КАНТОВАТЕЛЬ ПРЯМОУГОЛЬНОГО ПРОКАТА | 2012 |
|
RU2489222C1 |
1. КАНТОВАТЕ.ПЬ ДЛЯ КОНТЕЙНЕГОВ, содержащий шарнирно установленную на основании с возможностью поворота в вертикальной плоскости силовым цилиндром платформу, отличающийся тем, что, с целью обеспечения автоматической фиксации контейнера, под платформой жестко закреплены кронштейны, на которых шарнир, но смонтированы подпружиненные захваты для взаимодействия верхними частями с контейнером, а нижними - с основанием, при этом на нижних частях смонтированы ролики. 2. Кантователь по п. 1, о т л и ч а ю щ и и с я тем, что платформа выполнен,а с консольной изогнутой яастью для взаимодействия с подпружиненным упором, который смонтирован на основатш. W
BiJ 5 повернуто
| Катодная лампа | 1924 |
|
SU834A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
